 finallyfunctional
finallyfunctionalHere I post ideas for VR locomotion that I may or may not implement at some point. I post them here so others can expand on them or even implement the concepts themselves.
Ideas
- Passive VR Shoes
- Free Standing VR Support Rig
- Ceiling Mounted VR Support Rig
- Motorized VR Shoes
- Robotic Arm VR Locomotion Device
- Omni-Sphere VR Treadmill
- Motorized Caster
- VR Shoe with Rack and Pinion Mechanism
- Three Join Arm with VR Shoe
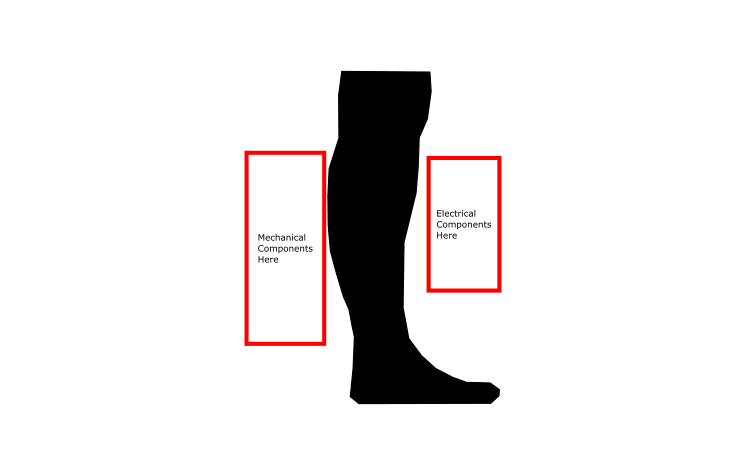
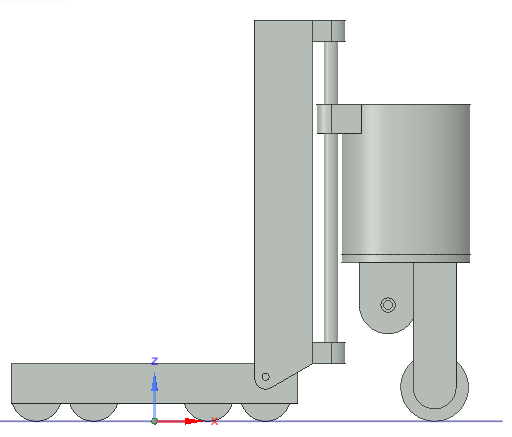
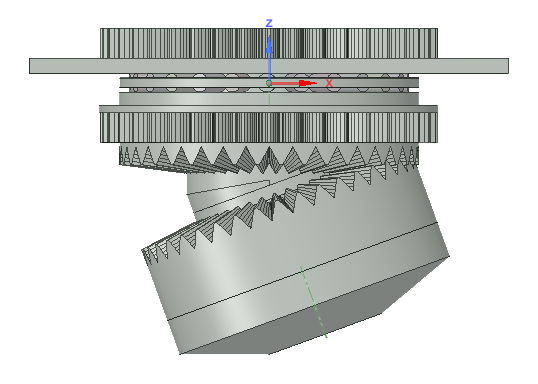
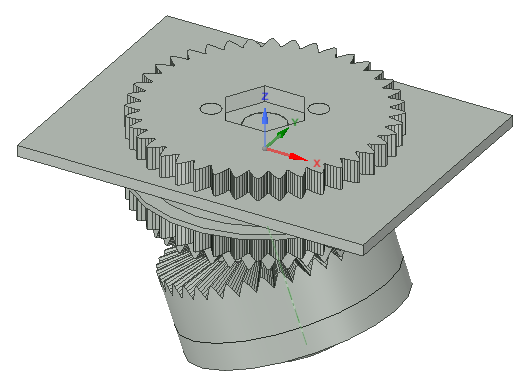
- VR shoe with a calf mounted motorized caster
- Omnisphere wheel
- Redirected walking with a VR shoe









 Dinithi Silva
Dinithi Silva
