 Implemented Robotics
Implemented RoboticsCurrently being used in the NOMAD Quadrupedal Robot Project!
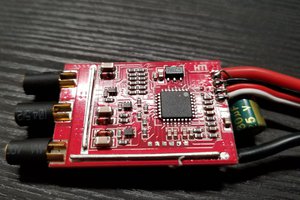
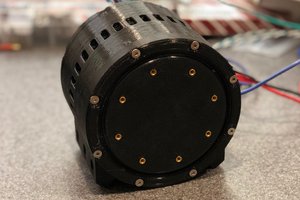
Actuator Features and Specifications:
- Custom BLDC 8118 sized 80Kv rated
- Integrated 6:1 single stage planetary reduction for Quasi-Direct Drive(QDD)
- Continuous/Peak Torque: 25N⋅m / 50N⋅m(short pulse duration)
- 40V DC Bus Voltage
- Continuous/Peak Current: 30A/80A (still needs testing)
- Integrated AMS5147 Magnetic On-Axis Absolute Encoder
- STM32G474 Microcontroller
- DRV8323 Gate Driver
- 40khz Control Loop Frequency
- Ceramic Bus Link Capacitors optimized for use with Higher Control Frequency
- Field Oriented Control(FOC) operating mode for high efficiency
- FOC Current Mode
- FOC Torque Mode
- FOC Voltage Mode
- Position Control Mode
- Speed Control Mode
- CAN-FD 5mbps Command Interface
- UART Command Interface
- On board FET Temperature NTC Thermistor
- Support for External Temperature NTC Thermistor





 Anthrobotics
Anthrobotics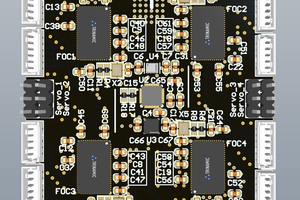
 ChengDanguo
ChengDanguo
Beautiful machining!