 Implemented Robotics
Implemented RoboticsRobot mass: 18kg with Batteries
Body Dimensions: 650mm L x 160mm H x 400mm W
Leg link length: of 280mm
Lower leg actuation: 1.4:1 chain drive
Joint Actuators: (12) Custom NOMAD BLDC QDD Actuator
More details to come!
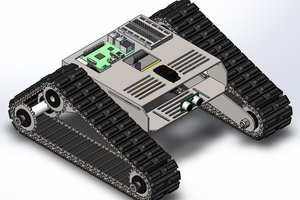
Medium-sized 12-DOF Quadruped Robot inspired by MIT Cheetah and Boston Dynamics Spot Mini
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Robot mass: 18kg with Batteries
Body Dimensions: 650mm L x 160mm H x 400mm W
Leg link length: of 280mm
Lower leg actuation: 1.4:1 chain drive
Joint Actuators: (12) Custom NOMAD BLDC QDD Actuator
More details to come!
After a bit of a lengthy hiatus on the NOMAD project things have started to progress again. Personal life, and *real* work life have been extremely busy on the backend of this year. While the project was not completely shutdown as I worked out subtle design details in preparation for the final build push nothing of note too much worthy of a project log update. However we are now ready to update the status, and should look for many more frequent updates as I start building on a more regular basis.
This update will just be a quick update to share some outsourced machined parts I have received for the upper leg portion. As well as miscellaneous pulley, sprockets, and tensioner parts. Ohh also got the feet recast in a softer durometer.
What's in the package?
- Upper leg parts (This is constructed in 2 halves to ease manufacturing and assembly)
- Updated Drive Sprocket (10T)
- Drive Sprocket Adapter (Facilitates mounting Drive Sprocket to the Actuator)
- Molded Rubber Foot (45A Shore Hardness)
- Knee Joint Chain Drive Parts
- This includes Chain Tensioners (LH/RH Threaded), Link Pins, Coupling Rod, as well as a new Super Light 11S Chain
I will post more detail of each of these parts in the not too distant future... For now see pictures below:
Sorry it has been a while since I have updated the project log. Work is still ongoing and you can check the progress (including some leg testing + hopping!) on the Implemented Robotics Instagram. Stay tuned for more detailed updates soon!
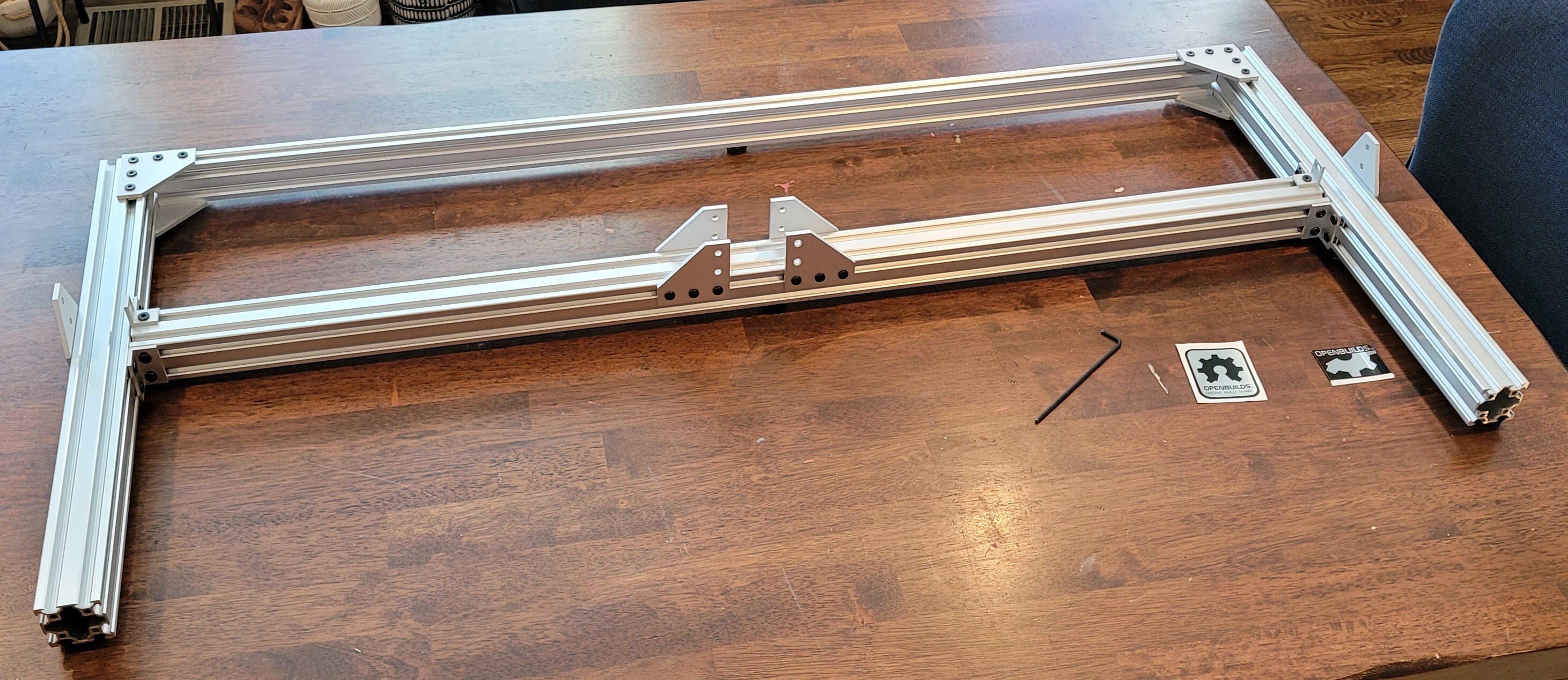
After quite the lengthy wait thanks to the big winter storm throughout the US last week I finally got my parts order from OpenBuilds. With these parts here it is time to build the NOMAD leg test stand!
OpenBuilds items always come well packed. Not a single marred surface to be found:
Bad thing about well packed items is that it takes FOREVER to get everything cracked open! Still ways to go after getting through that first layer:
Whew. That was a chore to get those parts out. Here they are laid out and ready to start assembly:
Started with the base first and here it is assembled:
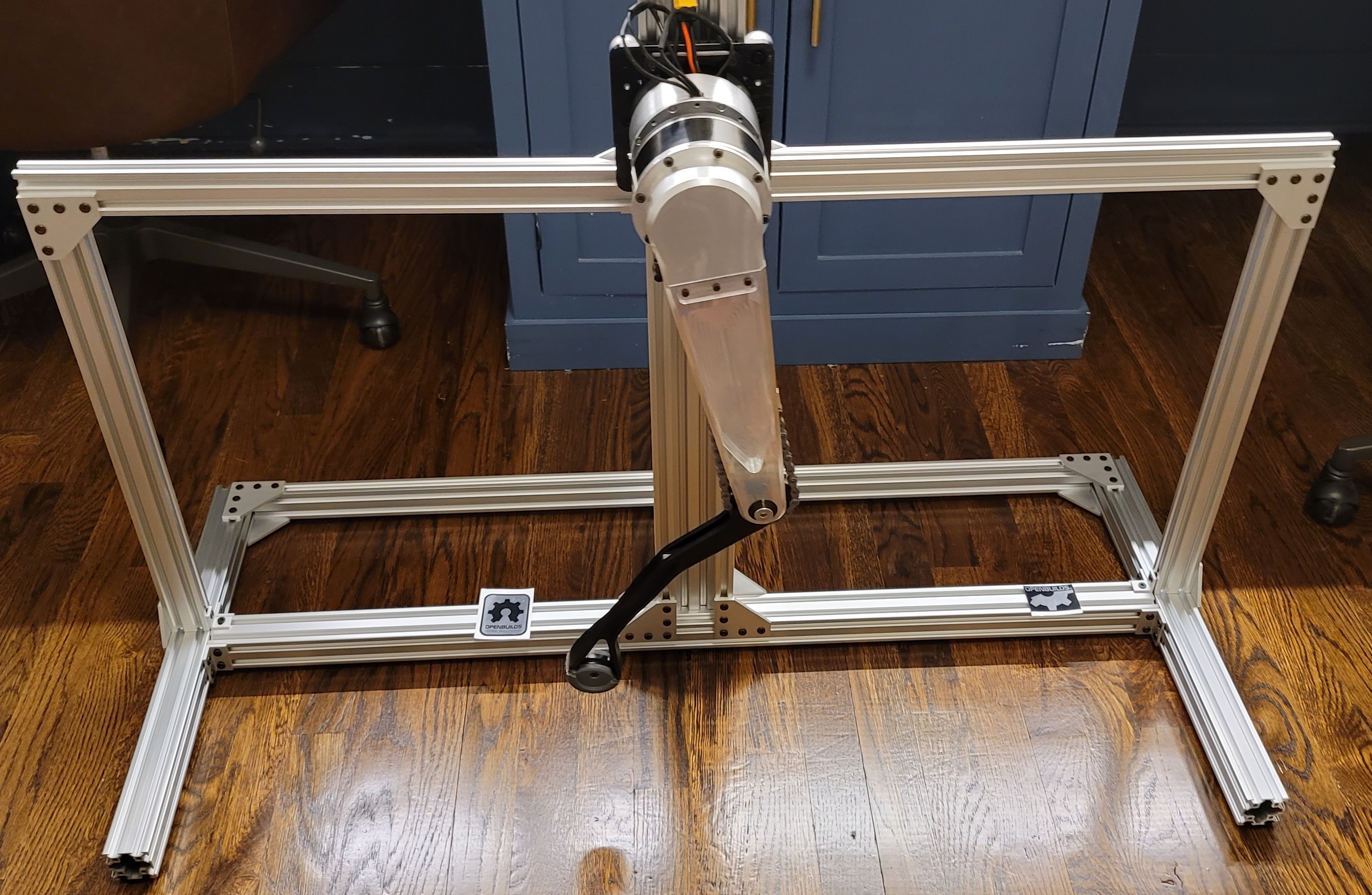
I always question my order of operations when dealing with extruded aluminum. Next time I may go with the drop in T-Nuts to avoid planning having the right amount of T-Nuts in all the correct channels before they get closed off from assembling other parts. Anyway after a few back and forths here we it all assembled with the leg on the linear track. All that is left now if to get the E-Stop switch, wiring and controller done to run some stress tests. Getting REALLY close to seeing some physical moment!
Now that the first prototype leg has been assembled it is time to do some testing of the full leg sans hip motor. This is to make sure our communications loop between control pc and the motor controller is correctly closed and working. Also it will help to shake out any bugs in the math for our trajectory setpoints. The weather has stalled the shipment of the parts to build the stand. But hopefully when things thaw out over the next few days they will arrive!
Very exciting to finally get all the parts in and machining finished so that I could finally fully assemble a prototype leg. Couple of hiccups here and there but it will be fully usable for performance testing and the initial Shakedown cruise. Once I fix a few assembly bugs I'll document how it is assembled.
Pictured Below:
Here is the fully assembled leg:
Close up of the in-line chain tensioner mechanism:
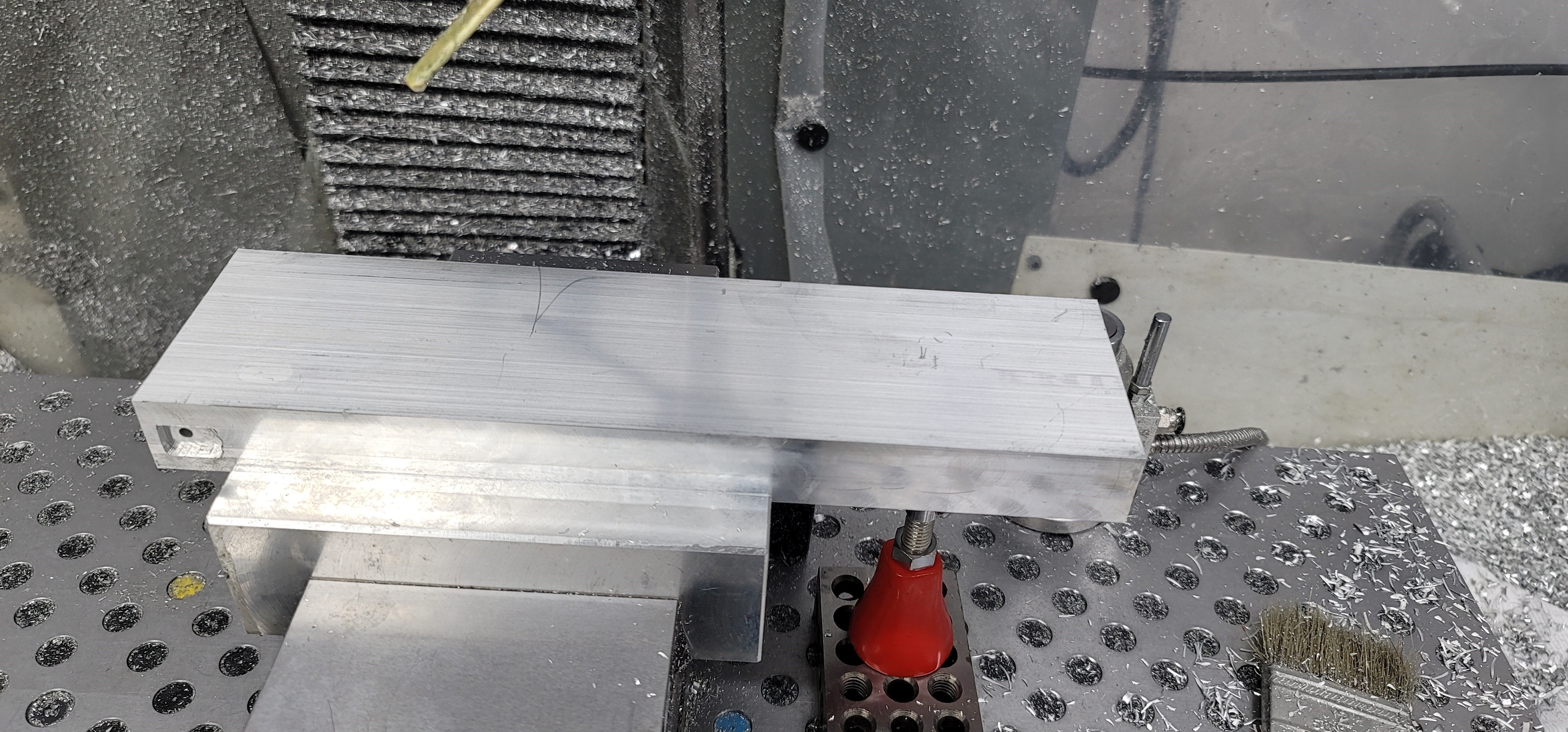
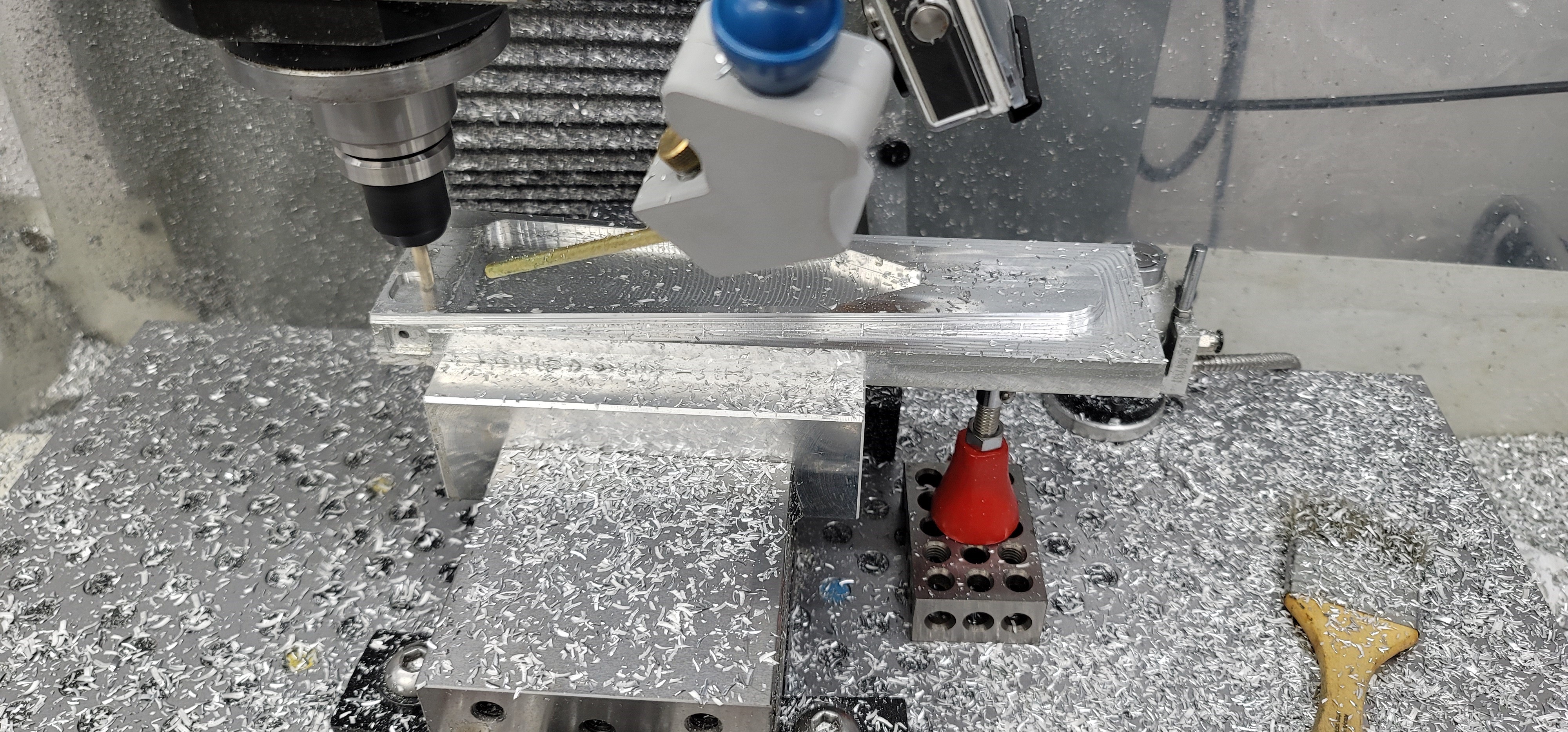
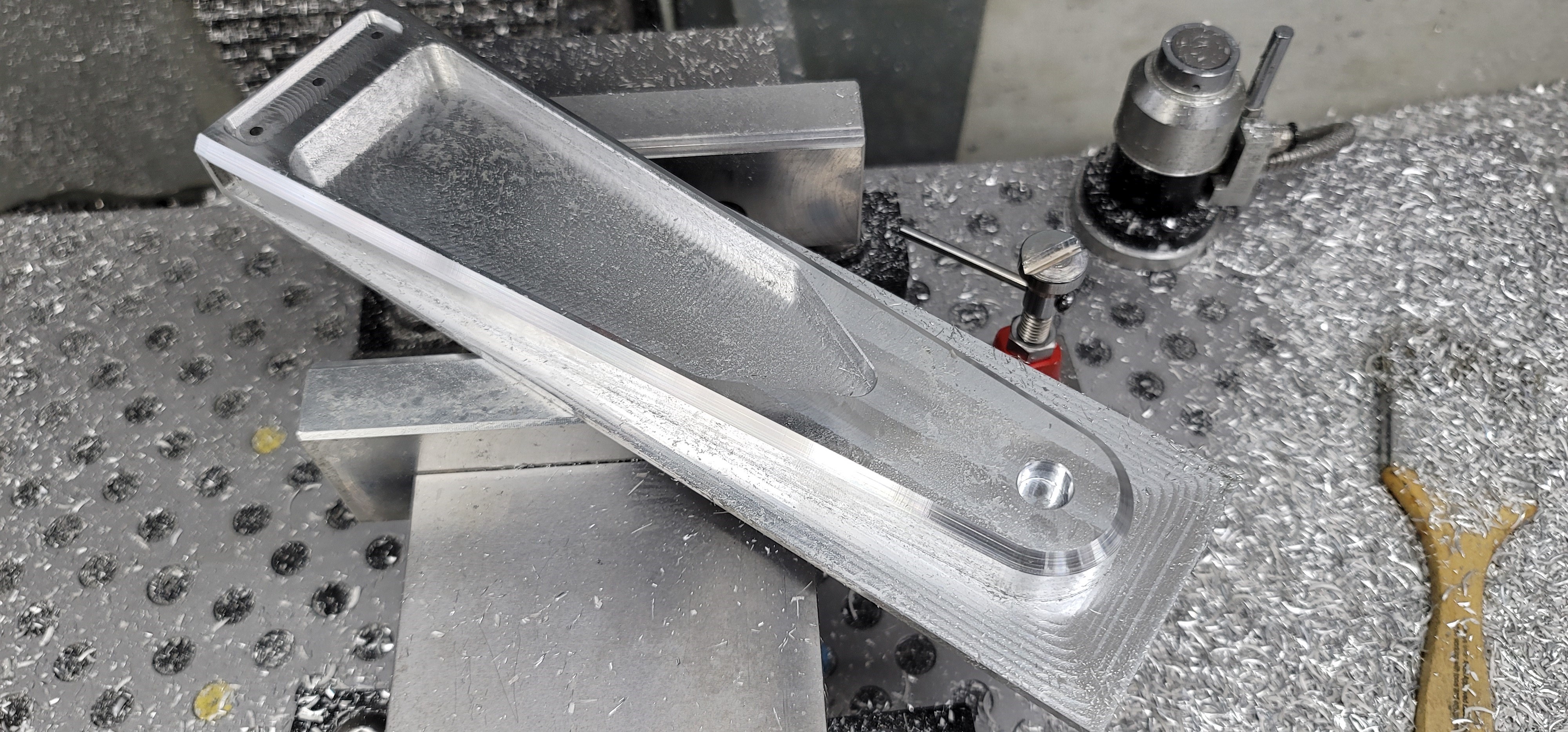
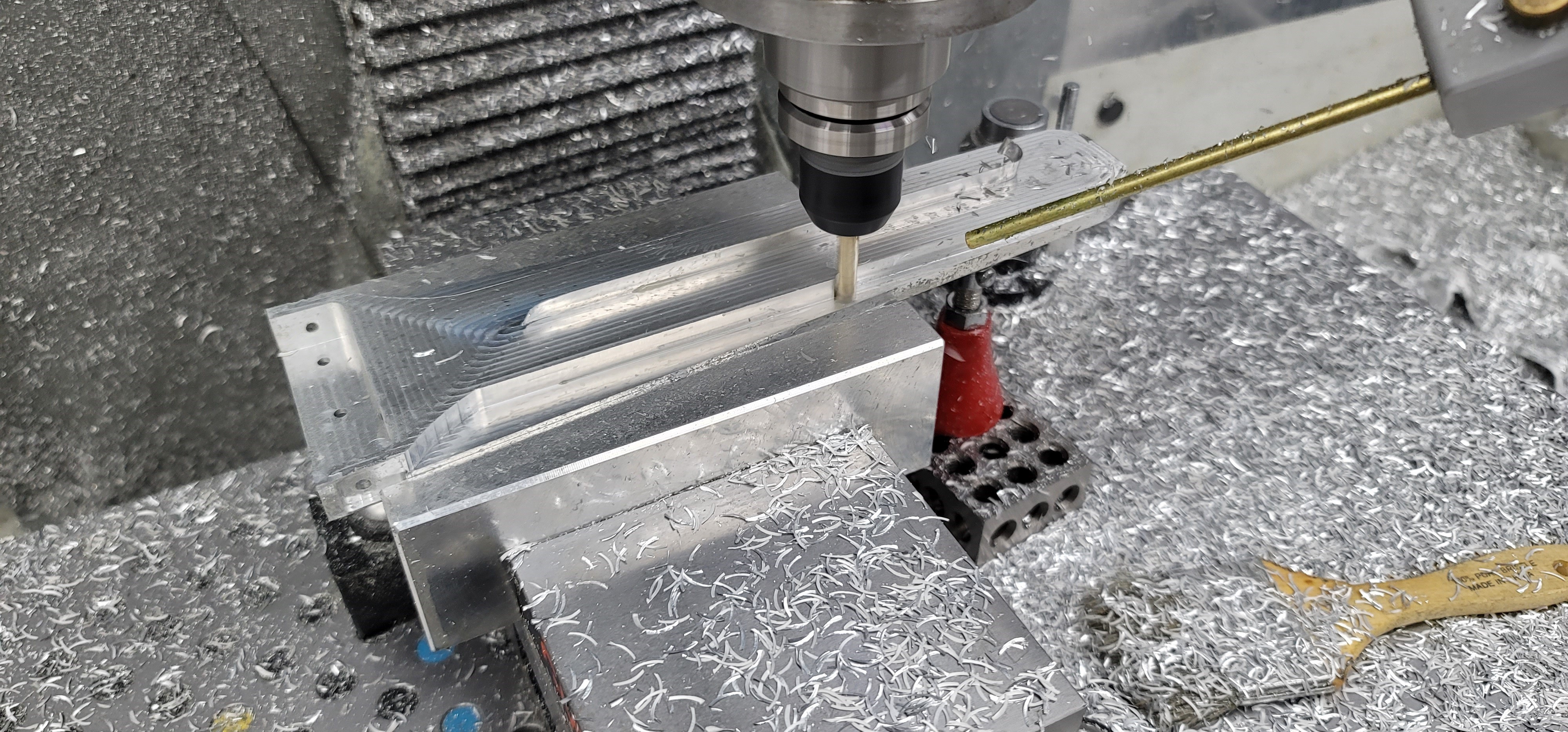
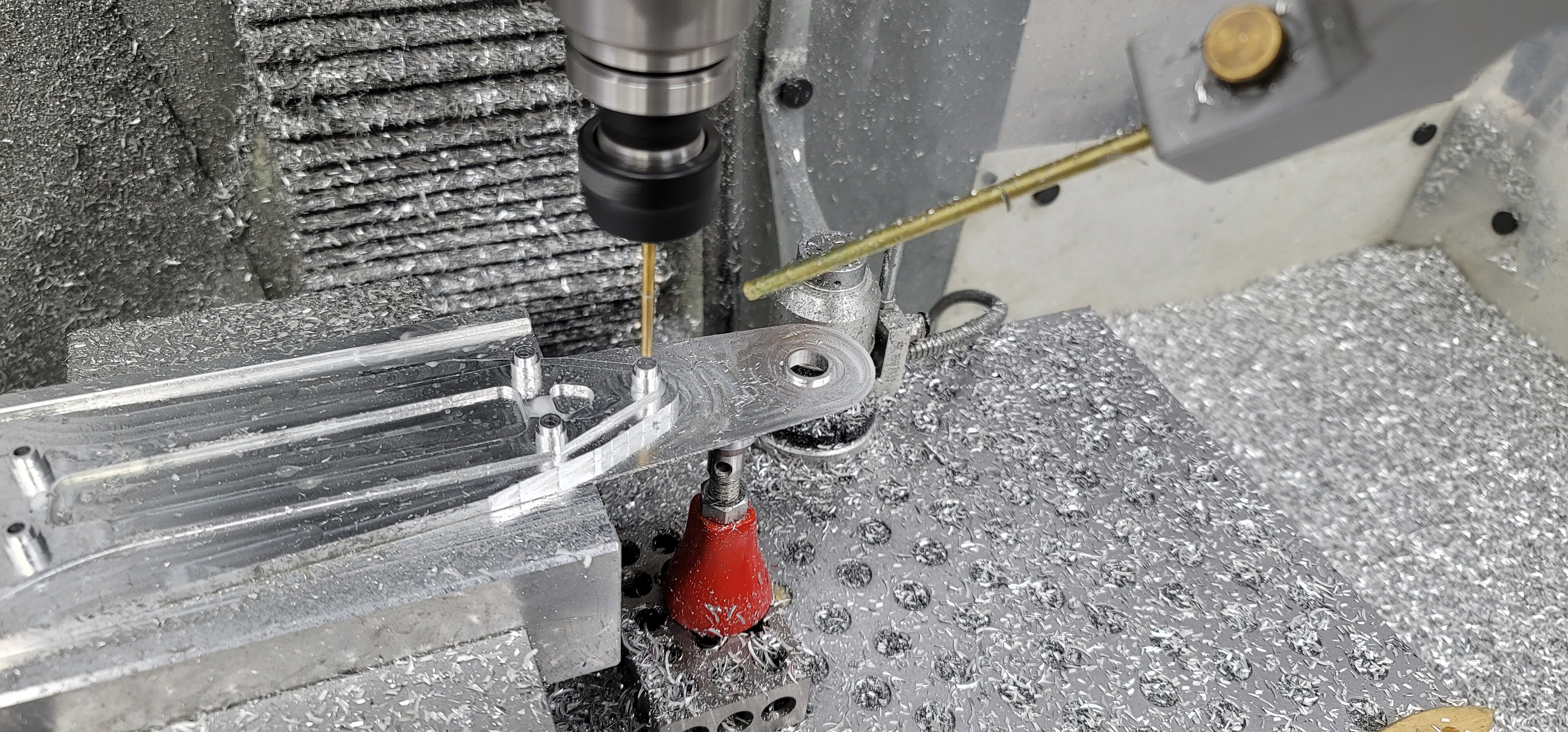
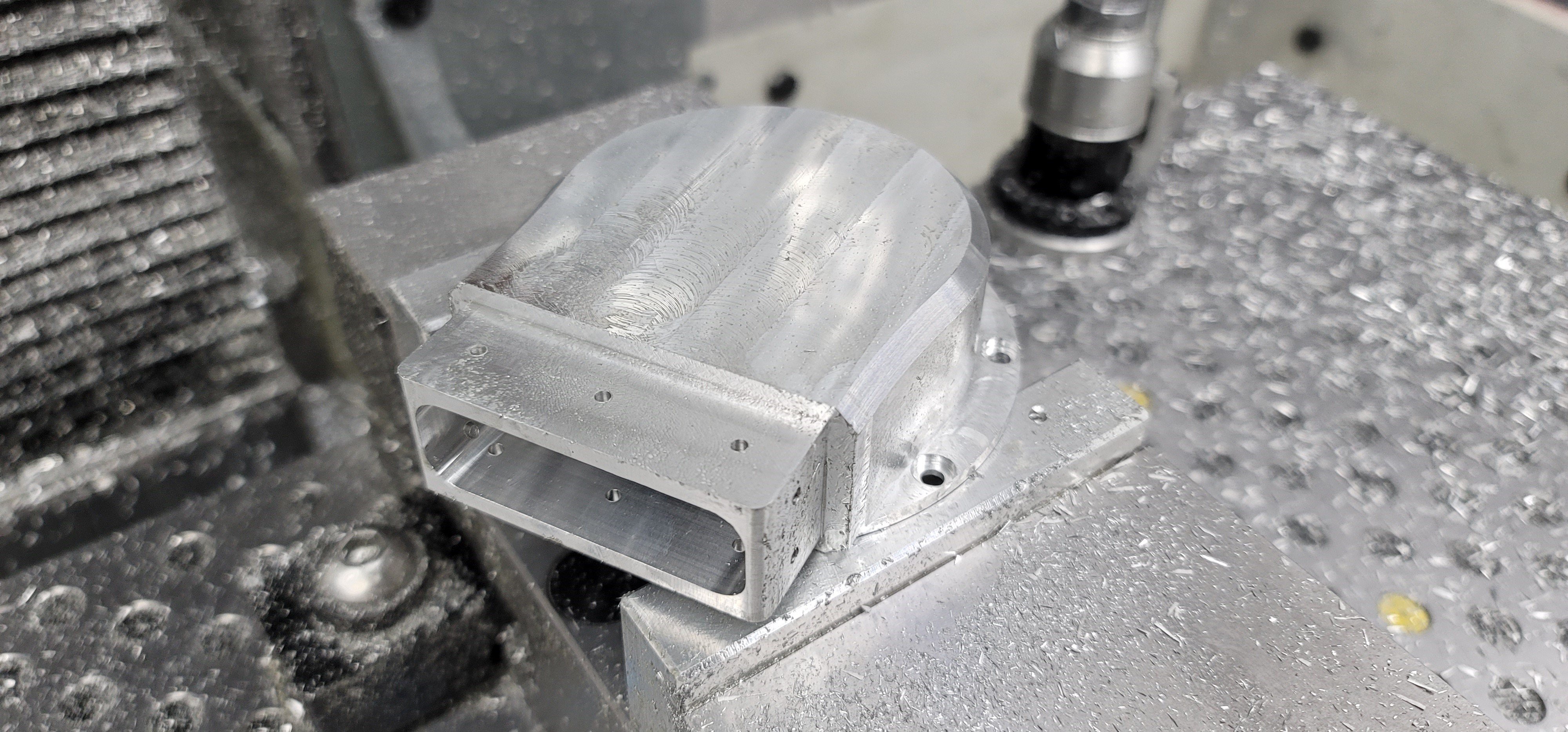
Here are some project progress photos of machining a prototype for the NOMAD upper leg design. It is done in 2 halves that are joined together and then attached to the shoulder mount. I will eventually make a proper fixture plate for these operations as the vise overhang + jack stand is a little too precarious!
Shipment has arrived from China! Includes several parts that I didn't feel like allocating resources/time to machine in my shop and the prices were very fair.
What's in the package?
- Lower leg part
- Knee Sprocket (14T)
- Driver Sprocket (10T)
- Molded Rubber Foot
- Knee Shafts
- Custom sized 1mm thick shims (These are very hard to find off the shelf. Can be 3d printed as well)
Time to move forward on leg construction!
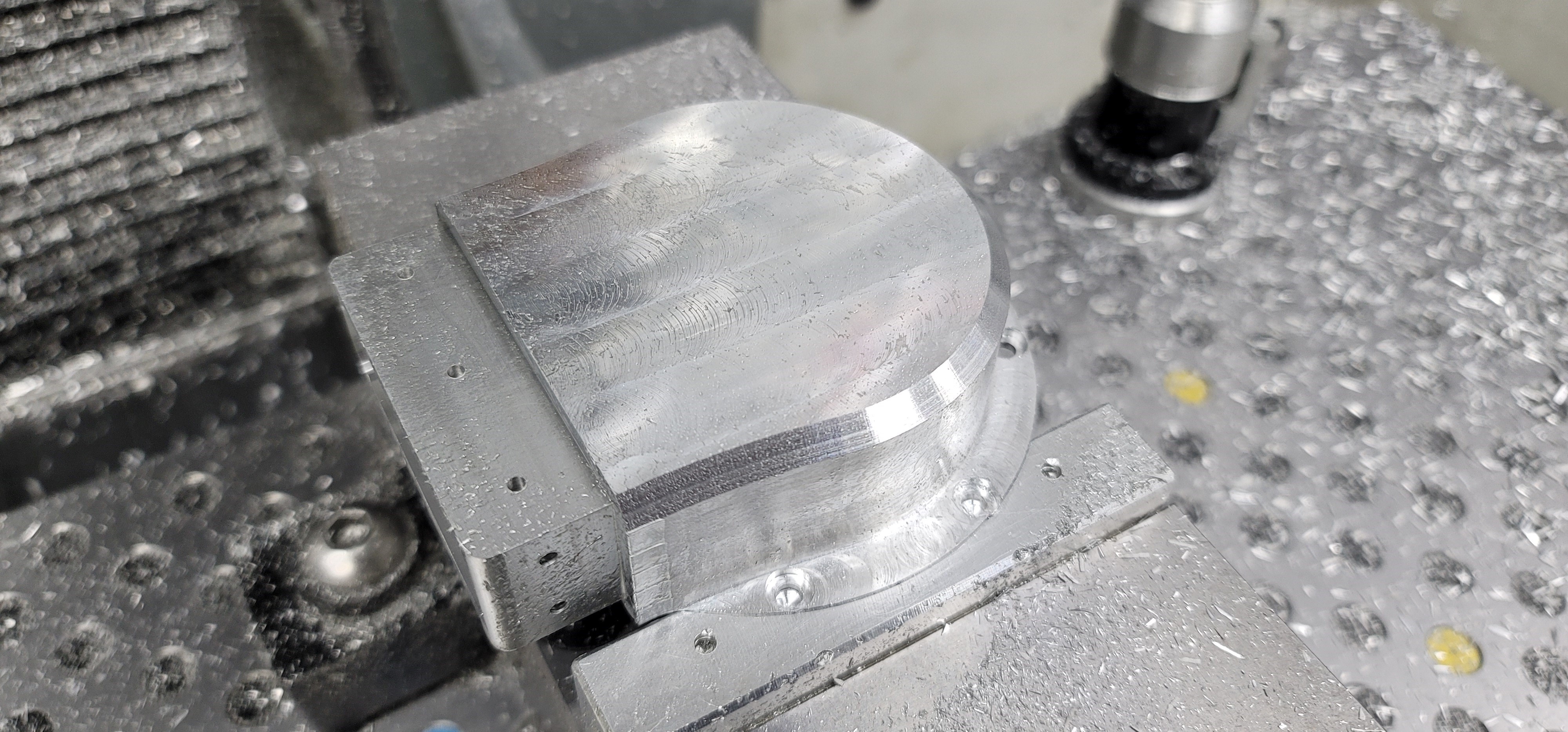
Machining one of the NOMAD shoulder motor to leg mounts. Was a tricky operation with 5 setups. I will optimize the rest of them!


High quality work, I am very curious where you will end up :). Good luck!




















 jupdyke
jupdyke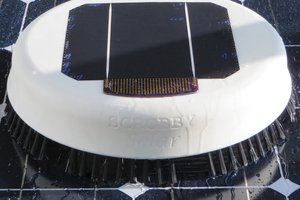
 Fabio Vezzari
Fabio Vezzari
 Val
Val
Excited to see where this ends up! Its cool that you outsourced the casting.