0%
0%
Build a System for Tracking Satellites in orbit
The purpose of my project is to build a system for tracking satellites in orbit.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Dave Ehnebuske
Dave Ehnebuske
 Thomas
Thomas
 Frank Herrmann
Frank Herrmann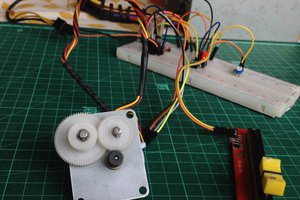
 KushagraK7
KushagraK7
What is the lobe width on your antenna? If it is significantly more than the 5 degree gear backlash, you can ignore the gear backlash.