 NNNI
NNNIIntegrating ADCs are at the heart of every DMM with a resolution higher than 4.5 digits. Despite being able to deliver sub-ppm resolution, they are in principle uncomplicated and relatively easy to construct and operate. Resolutions greater than 6.5 digits can be obtained with a BOM cost of less than 100 Euros.
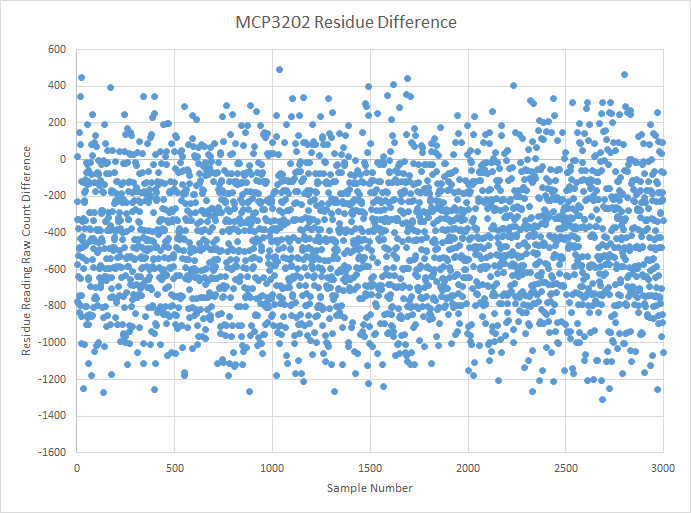
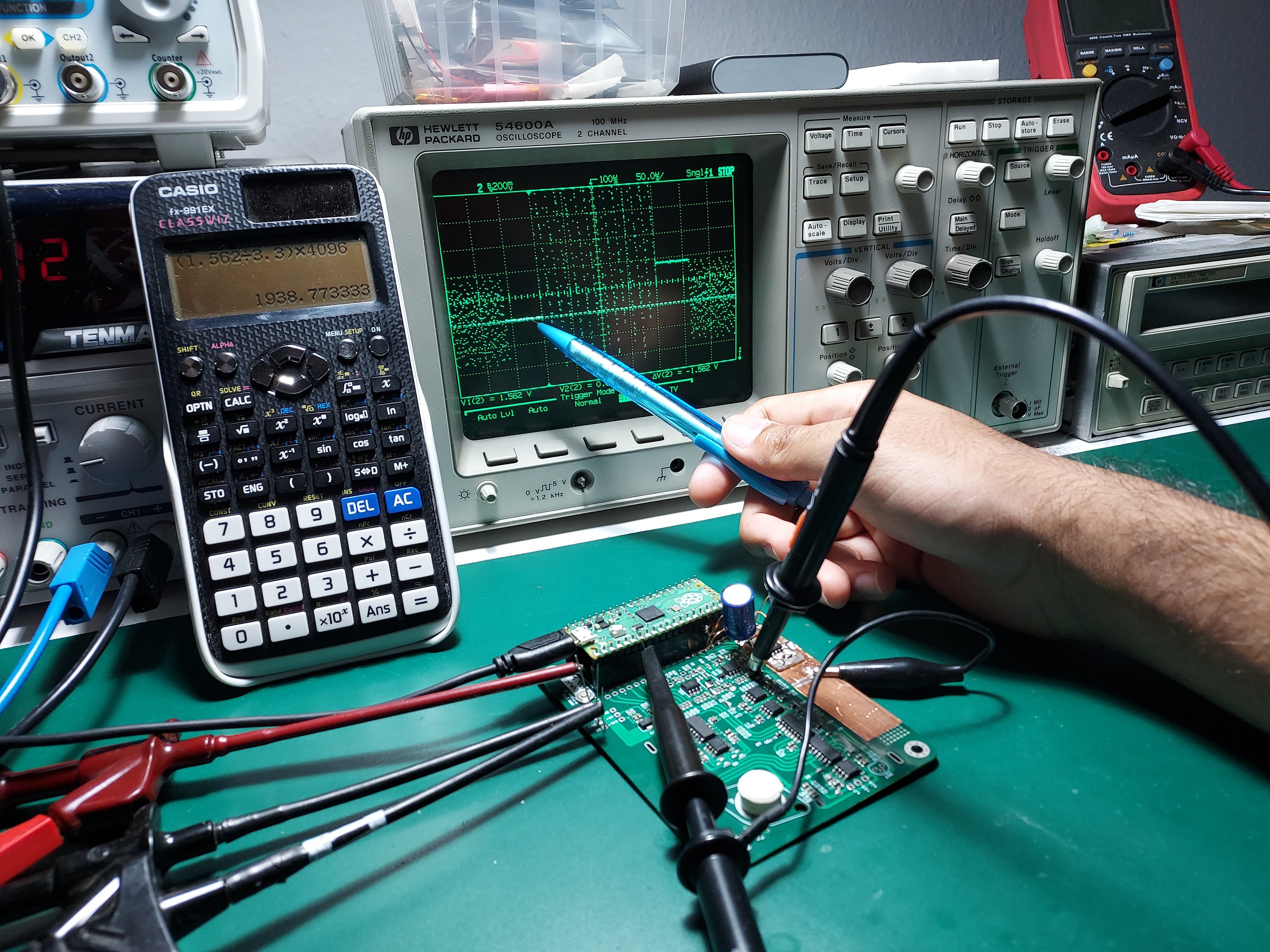
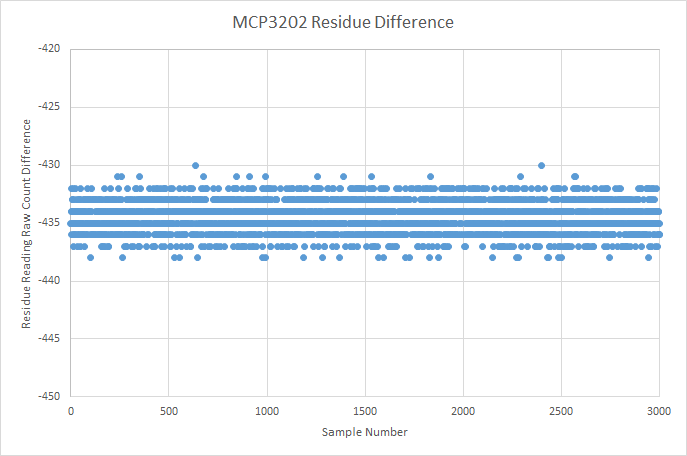
Armed with a few tubes of precision op-amps, integrated resistor networks and the computing power and GPIO control of the Raspberry Pi Pico, I embarked on an ongoing journey to build and characterize my own 6.5 digit multislope ADC.
























 Nick Sayer
Nick Sayer
 James Wilson
James Wilson
 helge
helge
 Bud Bennett
Bud Bennett
A quite decent multislope ADC can use just about any switches by switching current instead of voltage. The trick is to have a closed loop that adjusts the operating voltage for zero charge injection. Once you have current switching, it's not a long shot to use transistor pairs for switching. There, the trick is to switch the base currents from either leg into a current sense resistor, so that the base current is compensated for.
In most general terms, as long as you can ovenize the thing, really low cost industry standard op-amps that were around for decades will provide surprisingly good performance. Not necessarily practical in a production instrument, but for a hobby one-off it's perfect :)
I agree with others that RP2040 is just about perfect for this application. It makes for a great inguard, and the outguard could be just about any Linux board. Control via a USB isolator and an optocoupler for mains frequency reference and optional external trigger - that way outguard is not even necessary, it can be just one's PC.