 YJ Kim
YJ KimS-ROV hardware parts & assembly(2017/02/05 updated)
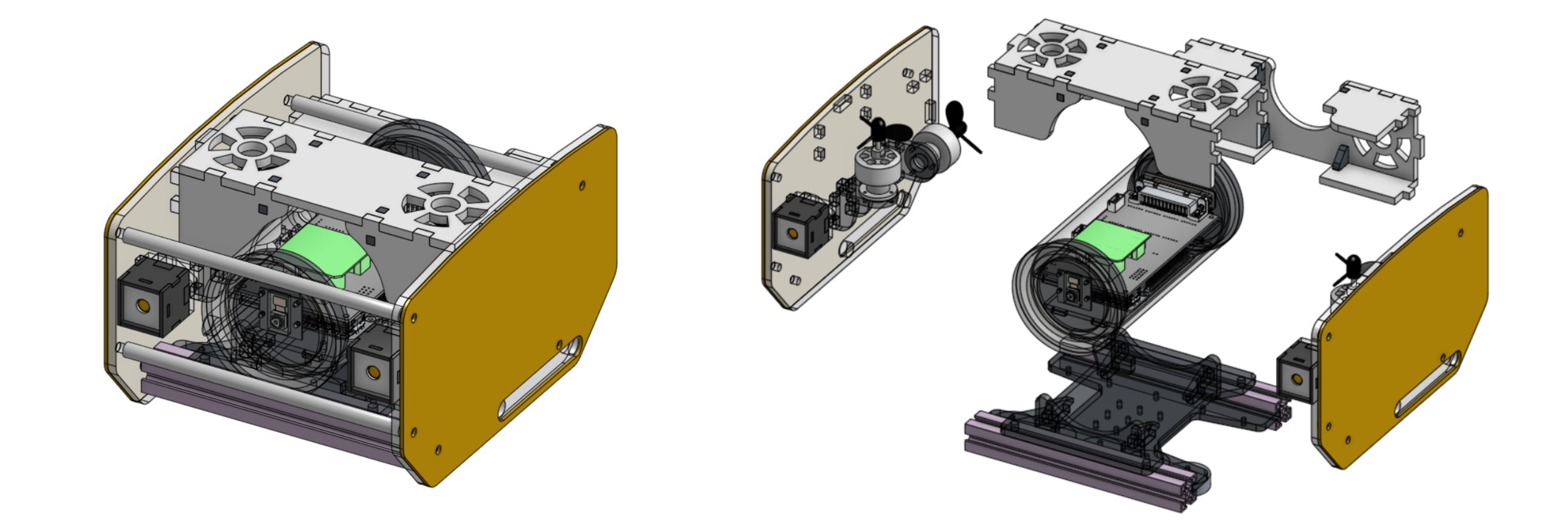
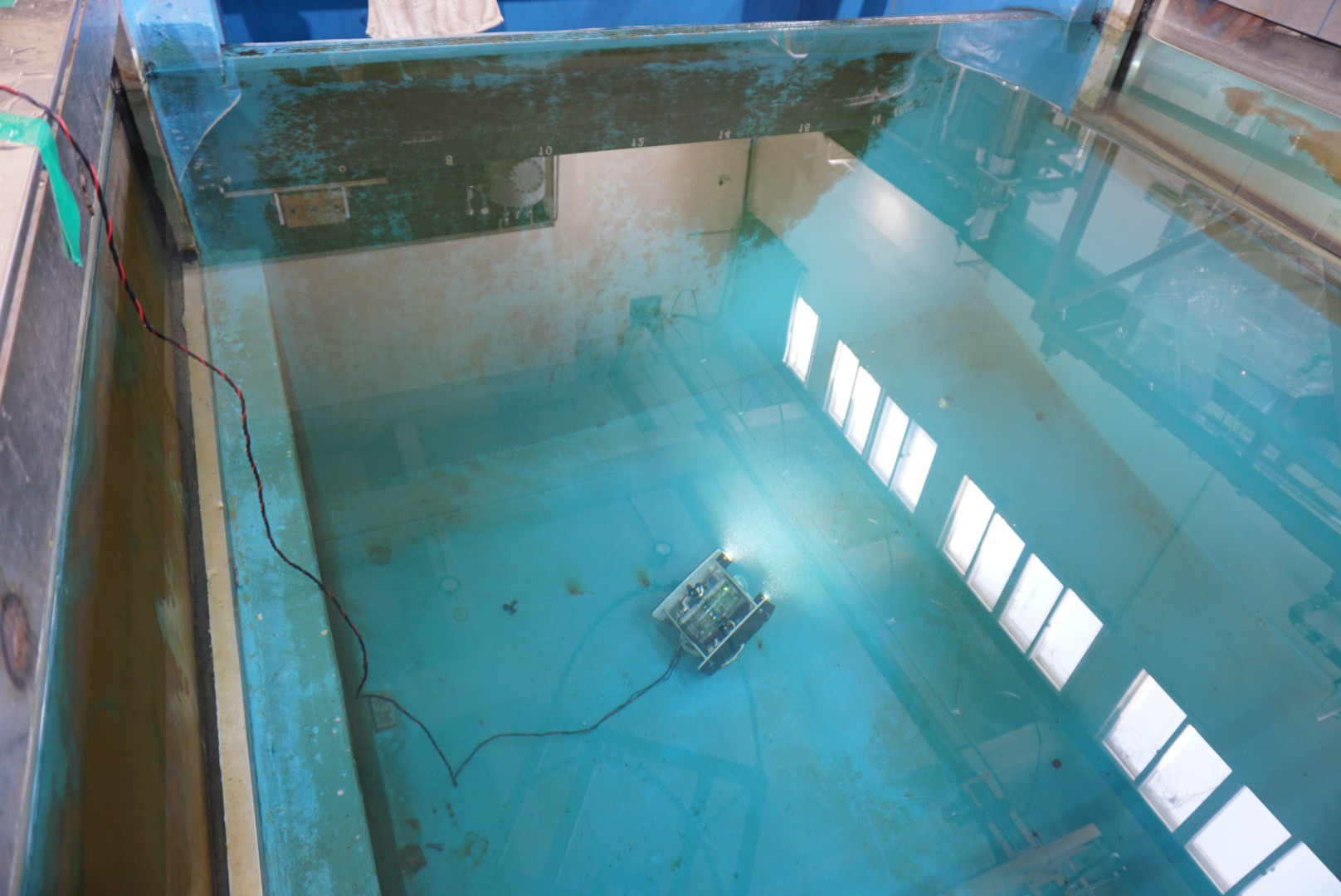
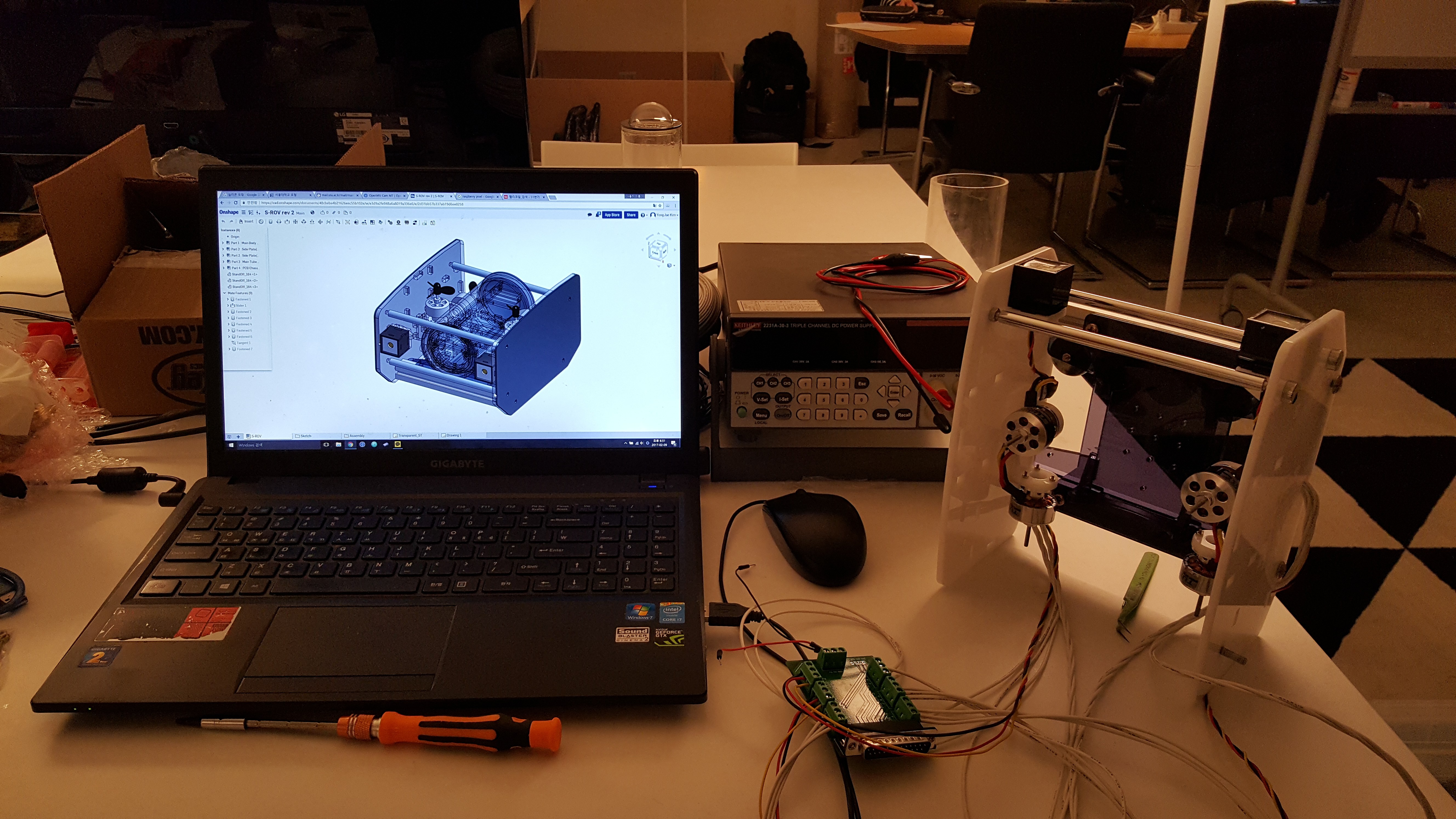
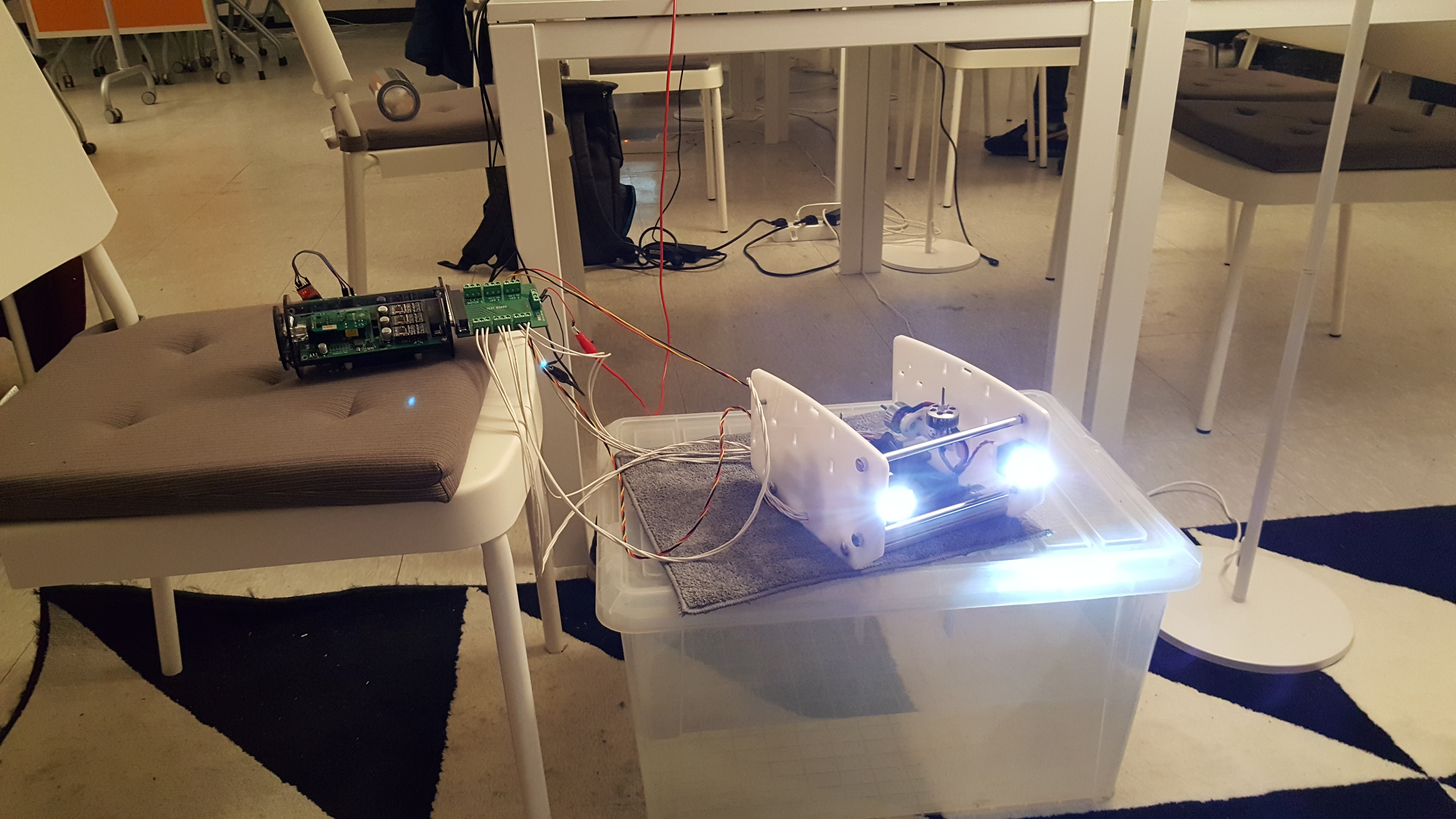
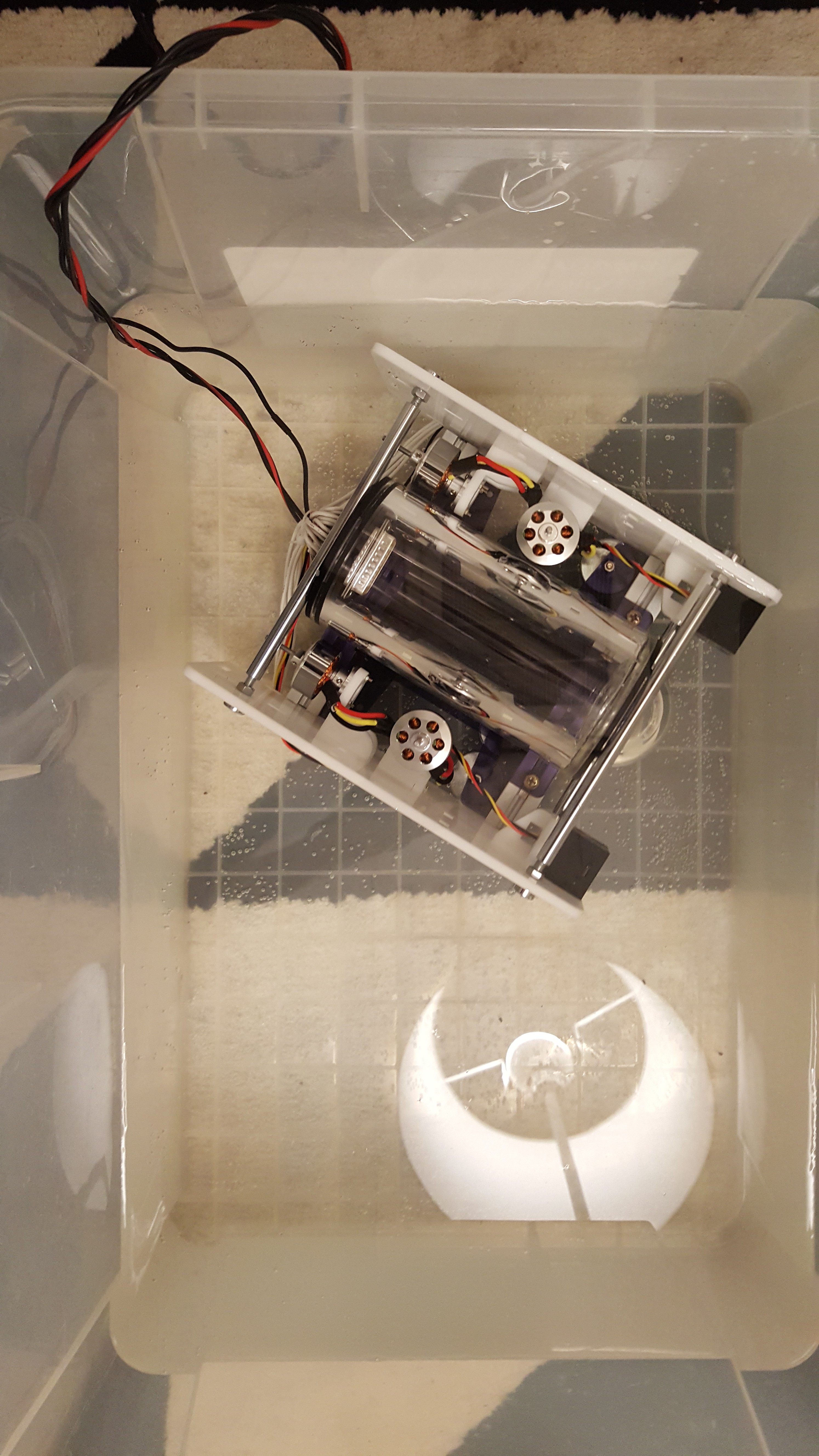
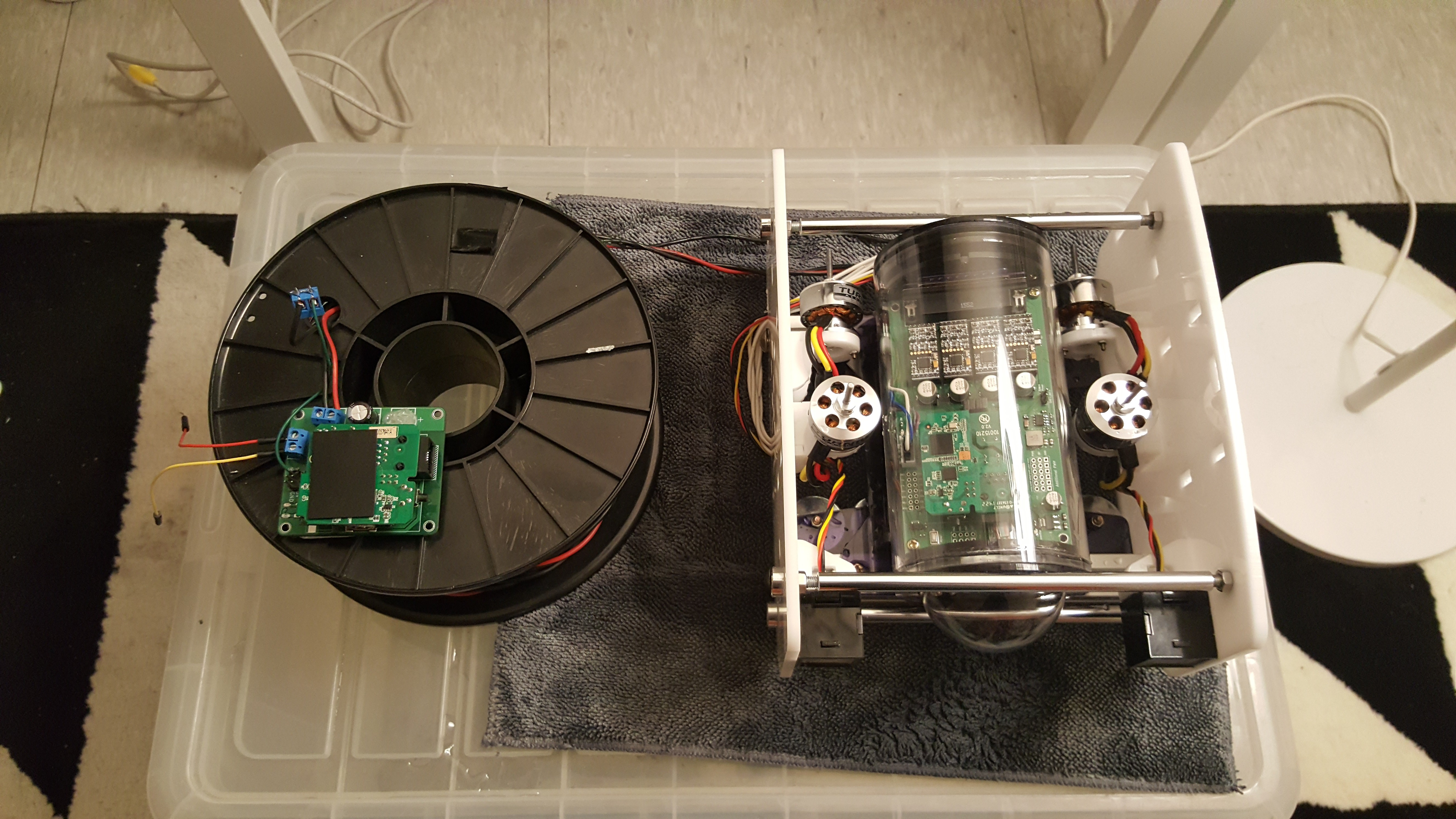
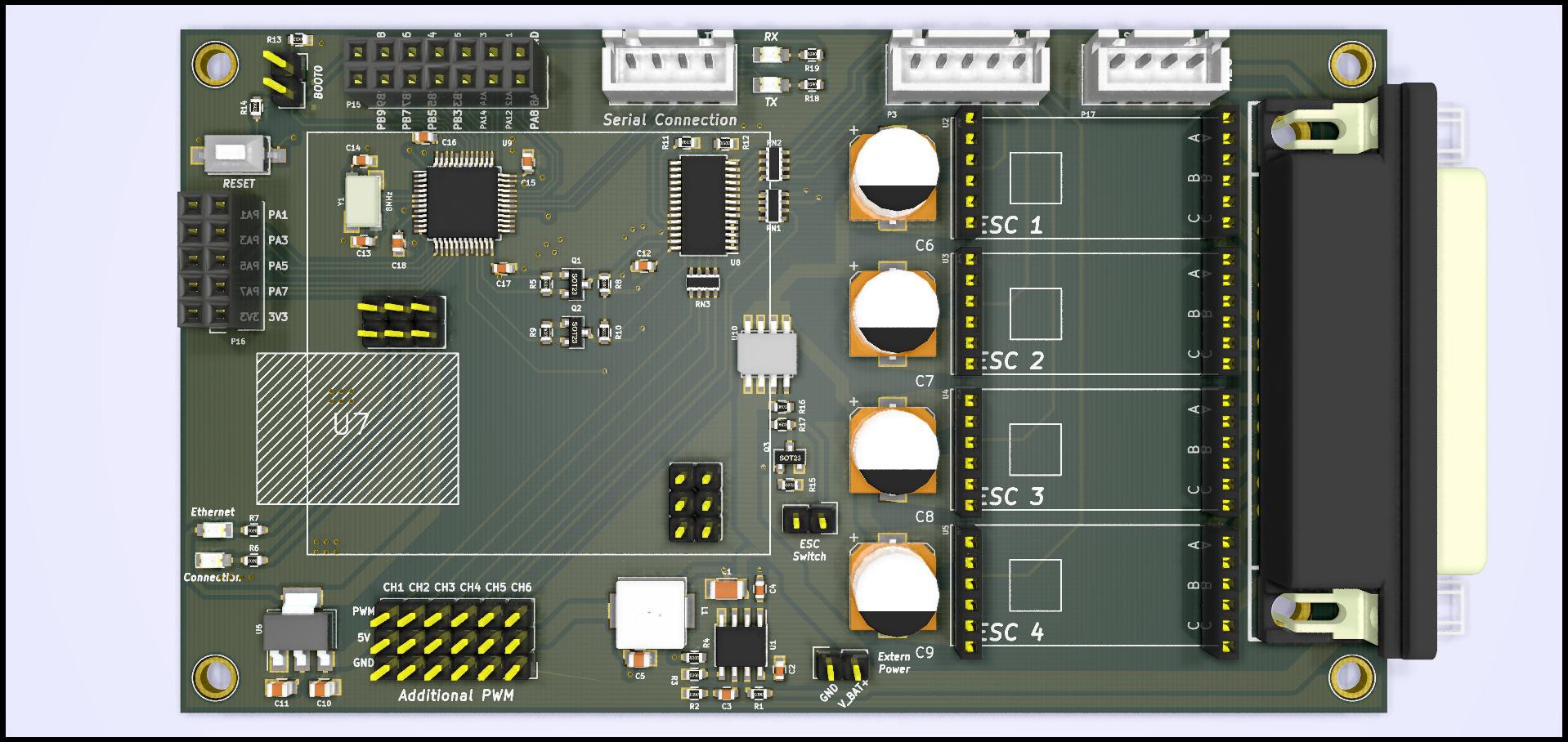
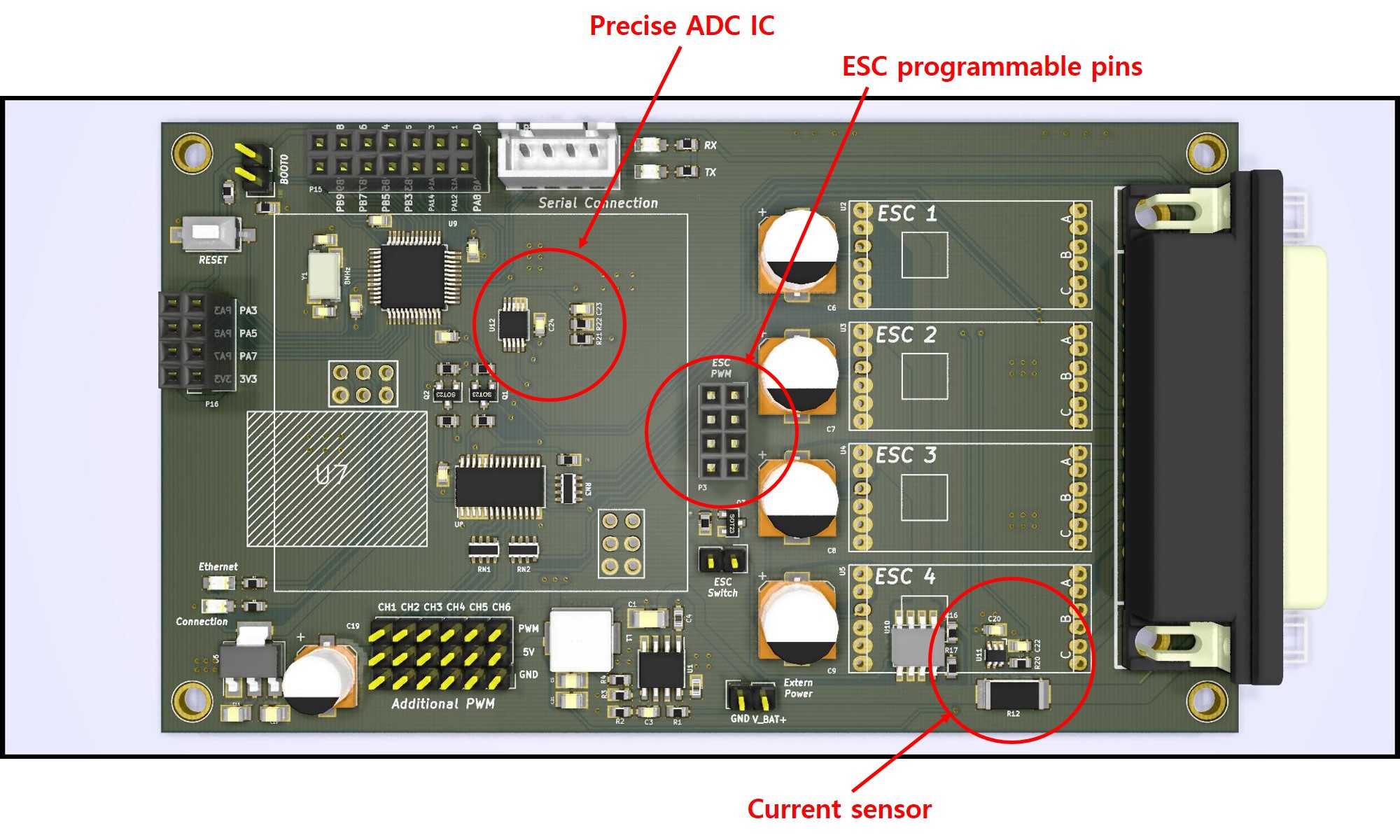
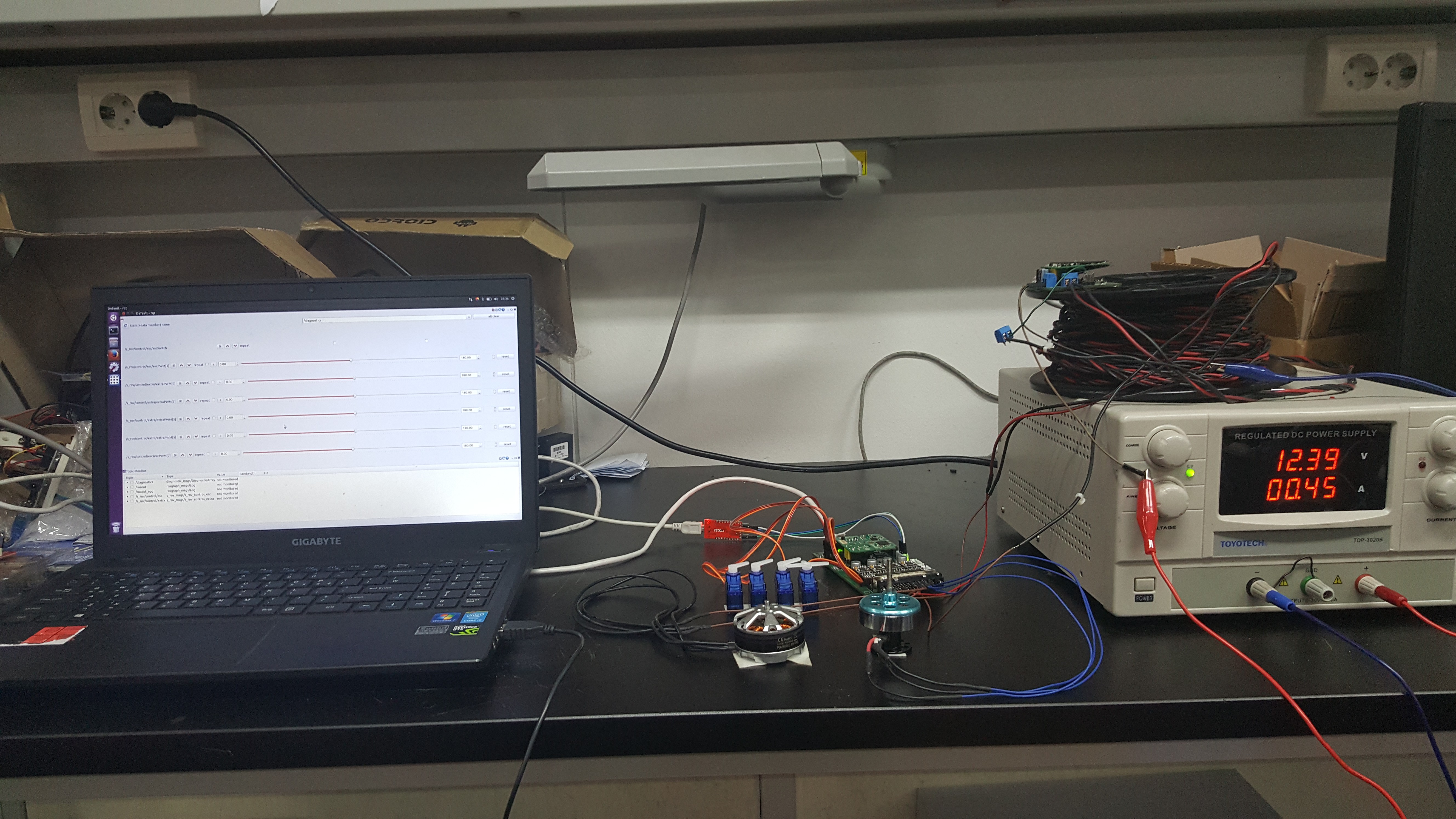
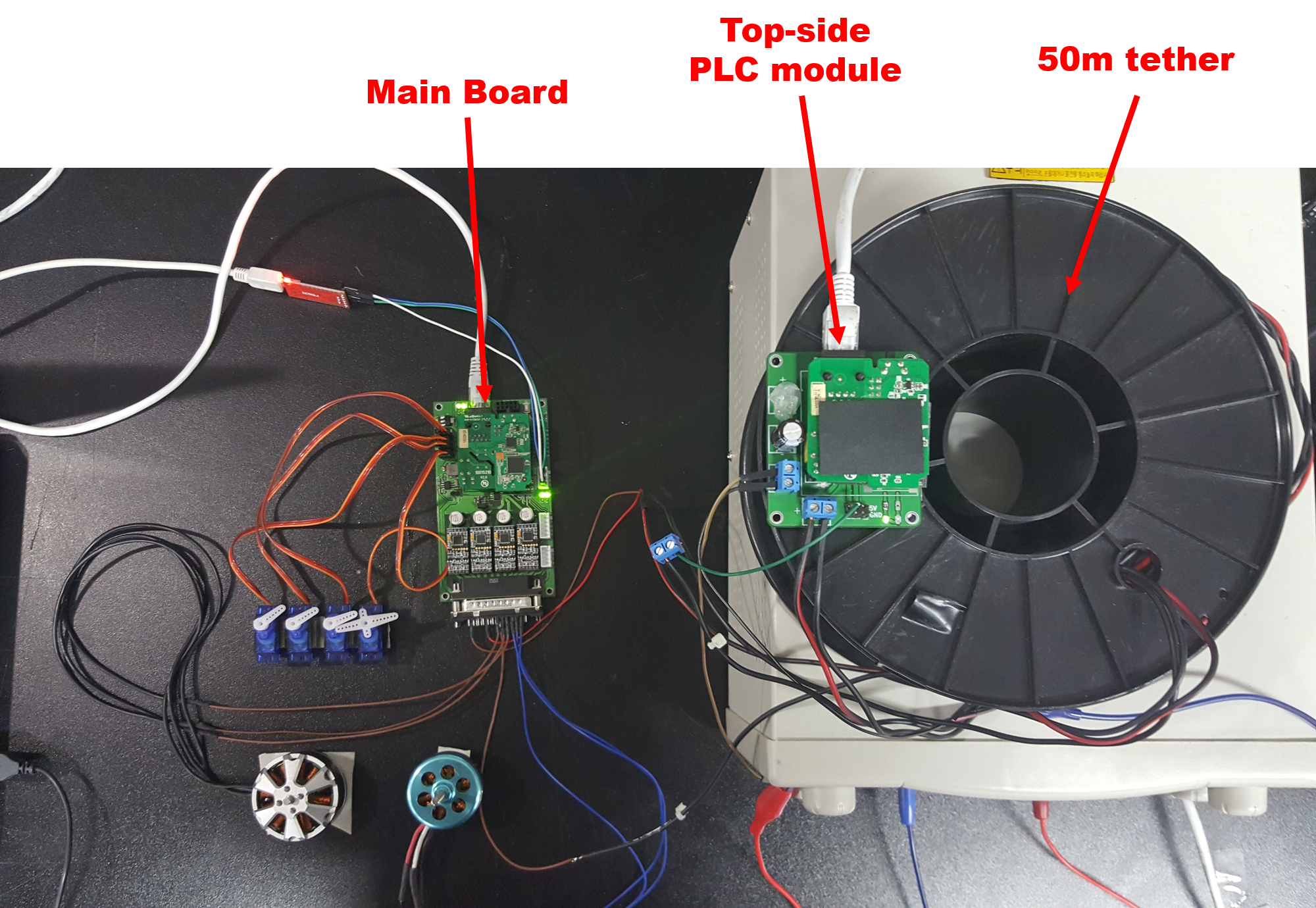
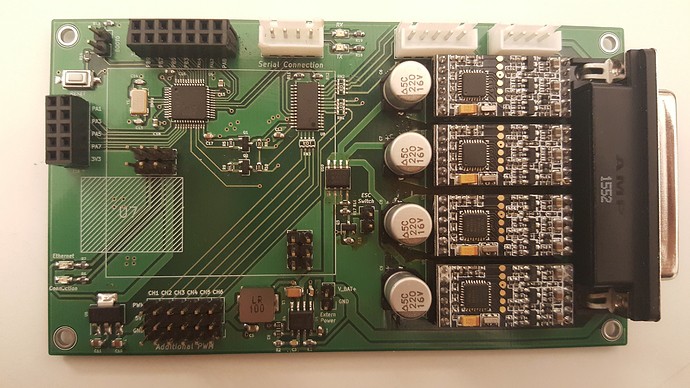
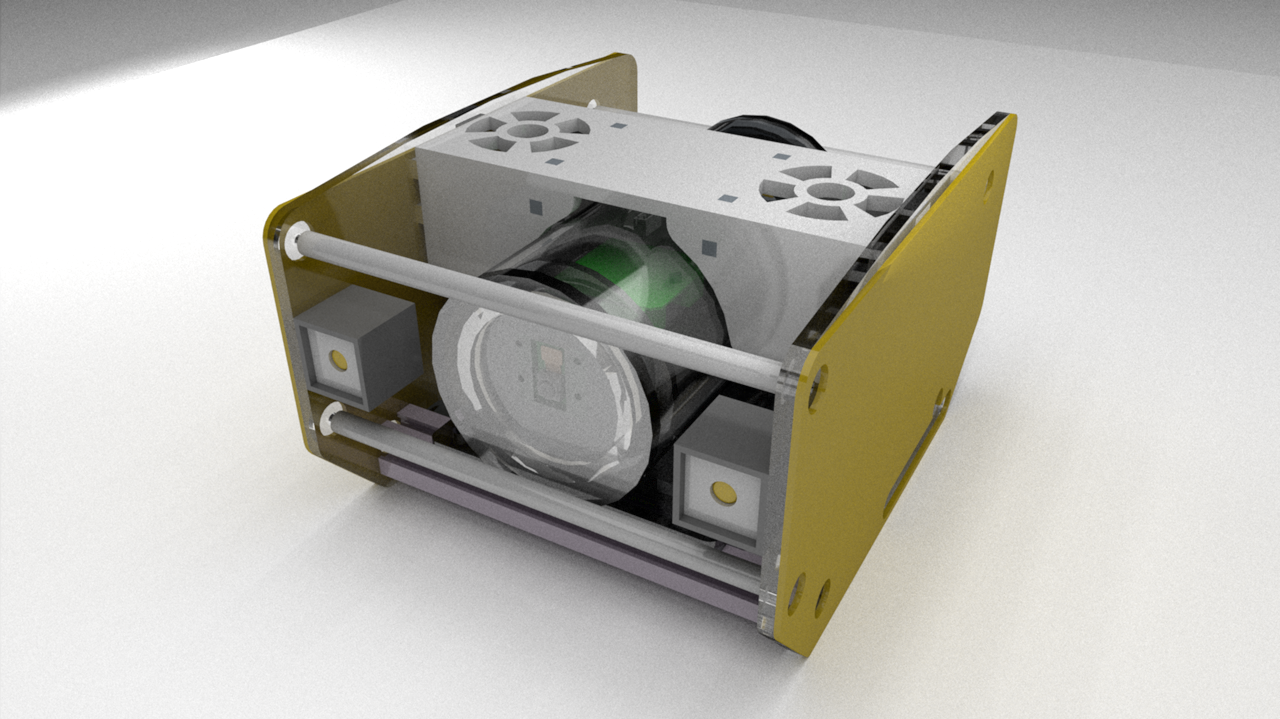
The most important thing in designing the ROV hardware was modularization for each part to make assembly and production easier. S-ROV consists of six parts, and each part can be made independently.
I'm still in the progress of designing and will continue to update the progress in this article. :)














 bobricius
bobricius
 Mile
Mile
 Matthew Sheffield
Matthew Sheffield
Thanks Alot