 Xieshi Zhang
Xieshi ZhangThis project is a work-in-progress!
Background
Plastic pollution in rivers and ocean is a big issue:
- Between 1.15 and 2.41 tonnes of plastic waste currently enters the ocean every year from rivers.
- Plastic pollution is long-term as they are durable in the environment
- Plastic pollution poses threats on aquatic life, ecosystems, and human health.
A key step in stopping ocean plastic pollution is to tackle the problem beginning in rivers.
Current solutions for river plastic pollution require large manpower and/or cost and low efficiency:
- Large machines with nets intercepting the pollution (for example the Ocean Cleanup Interceptor):
- Effective but extremely costly; not worth employing in smaller rivers
- Manual cleanup using boats and nets:
- Not very effective; requires large manpower
- Small manual remote controlled boats:
- Not very effective and nonspecific to trash; mainly in harbors and small lakes
What is this?
The goal is to create a boat that turns and captures trash on its own in even small waterways, thus autonomously cleaning up rivers.
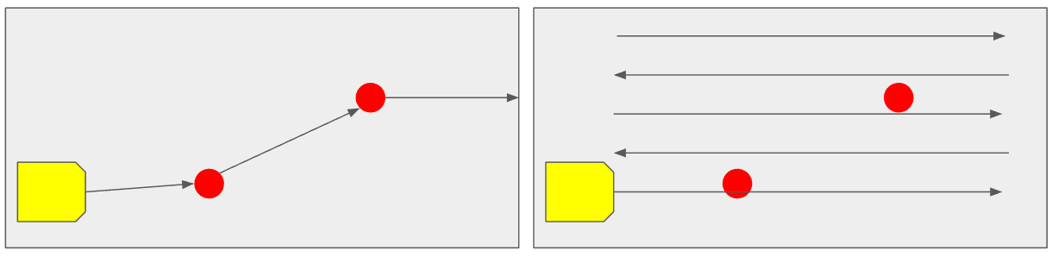
HydroCleaner path versus conventional remote controlled path. The HydroCleaner path “simulates” near-human control while being completely autonomous and cleans an area of waterway much faster than a conventional robot, which needs to sweep all areas without image guidance.
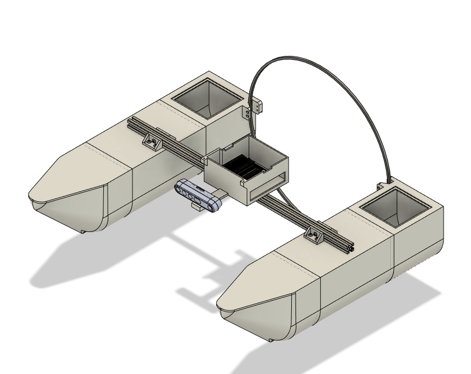
Mechanical Design
- Catamaran hull: two pontoons, two motors, propellers, ESCs.
- Joined by a 660mm aluminum extrusion with electronics mounted.
- Net on back of boat to collect trash.
- As the boat moves forward, trash flows in between the two pontoons into the net. It should not reverse.
Machine Learning
The boat is powered using a Jetson Nano, details found in the log. But the main idea is that the boat would navigate on its own via GNSS guidance, and whenever it spots a trash using the camera, it will automatically navigate to the object.
 Leo Vu
Leo Vu

 pat92fr
pat92fr
video please