 Nicholas Stedman
Nicholas StedmanPreview:
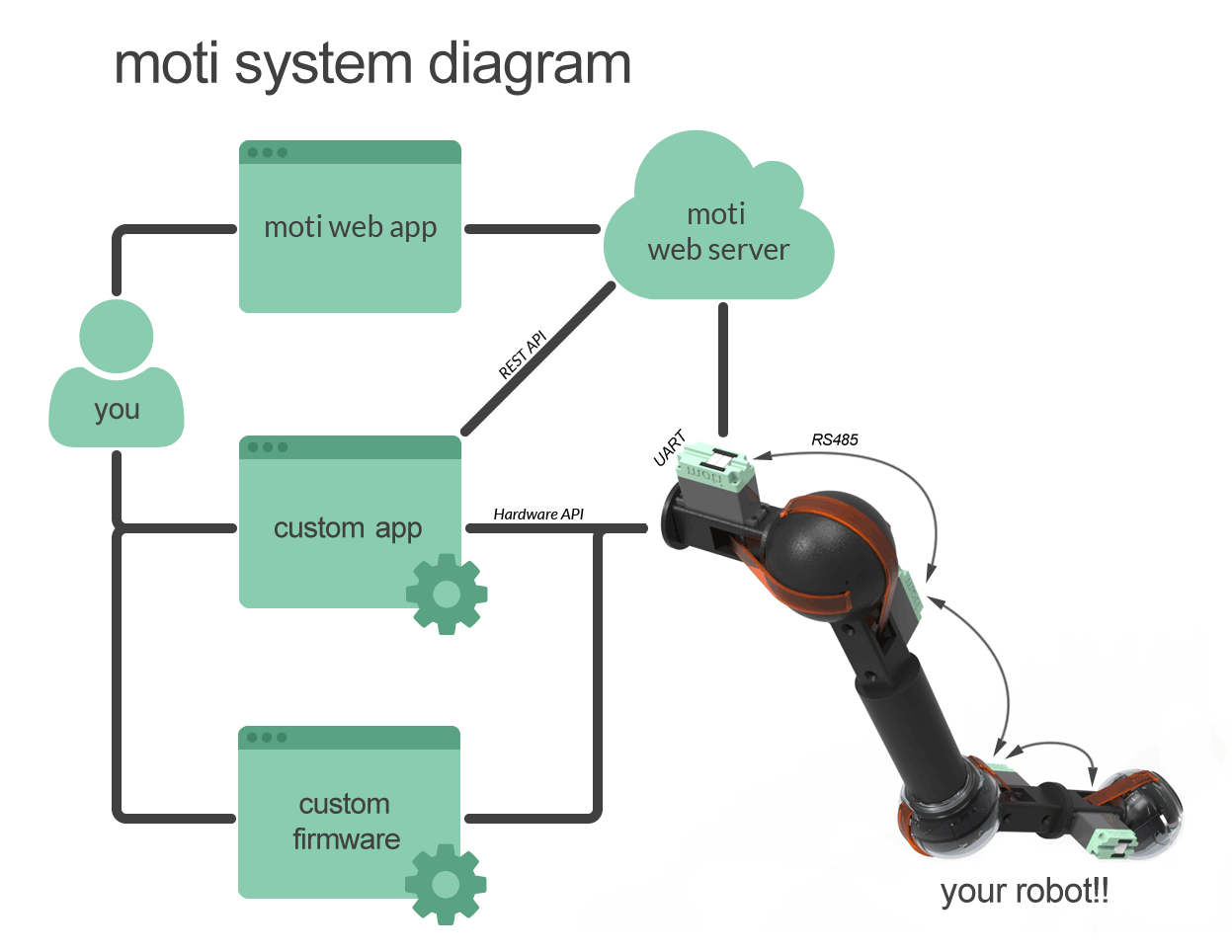
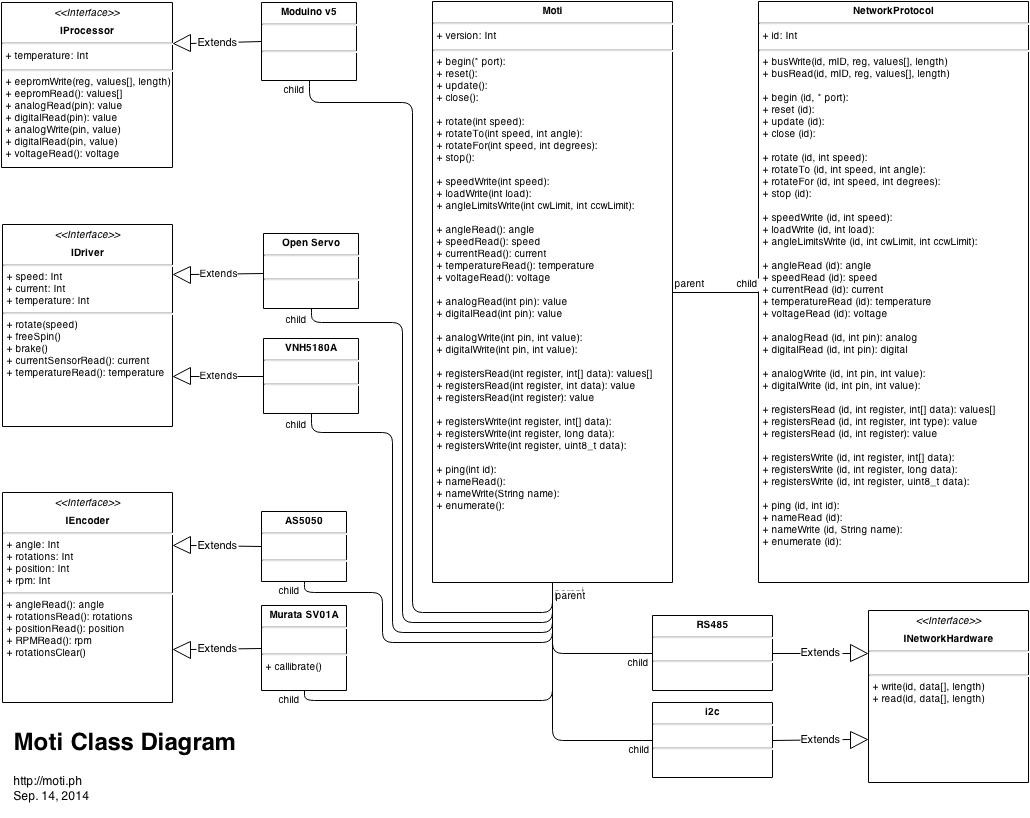
What the system diagram illustrates is that you can use our prebuilt web app to recognize, monitor, remote control & program your robot. Alternatively, you can build your own app (or use someone else's) that is customized for your application. Thirdly, you can program the motis directly to create an autonomous system.








 jcchurch
jcchurch
 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
 Yannis
Yannis
 Morning.Star
Morning.Star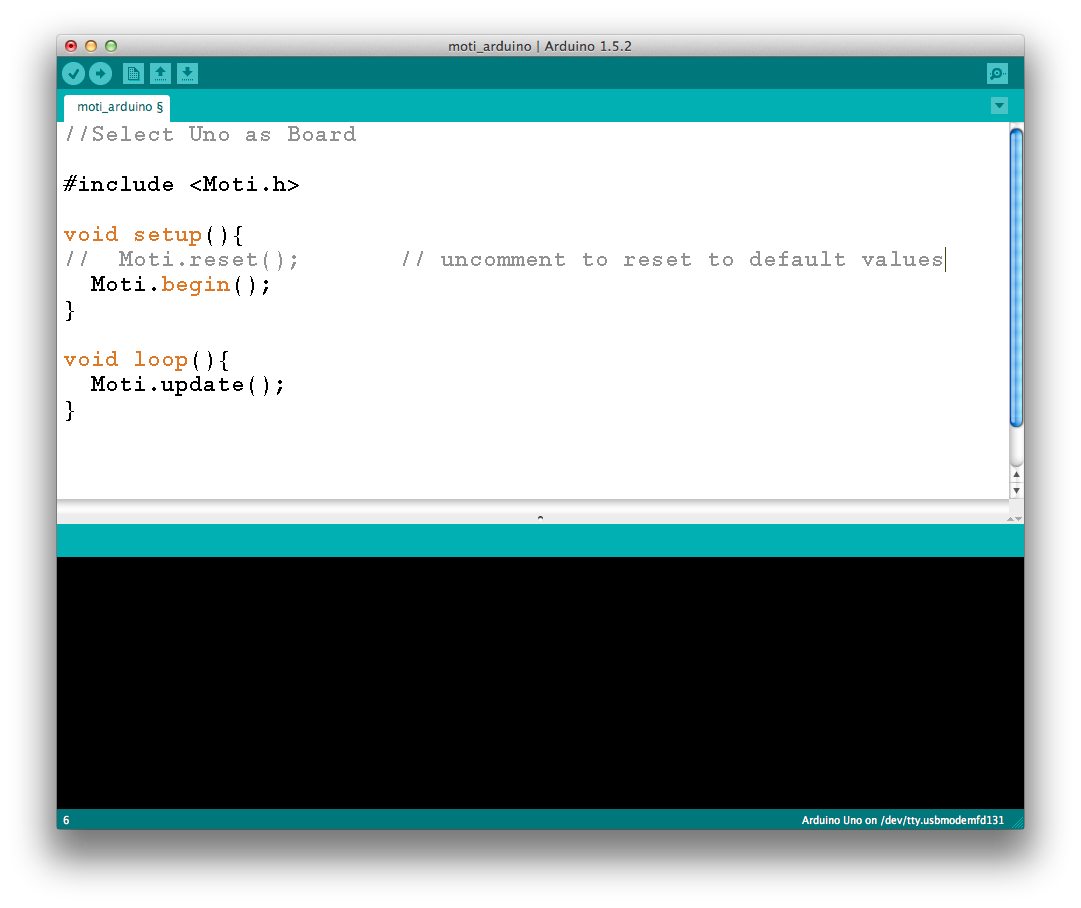{kind=link}