 Radu Motisan
Radu MotisanOne of my previous project entries, the #Exoskeleton, proposes a full body external suit to improve mobility both for those that lack it and for those that want more. But to get there, several lessons need to be learned. For a start I decided to focus on improving simple (but important) human mechanical tasks. One is running, and this is the purpose of this project, to build a device that can be attached to the lower legs and improve running performance (speed or endurance).
Biomechanics of running
Two muscles have a determinant role in running. First the Soleus accelerates the body forward and upward. Then the quadriceps accelerates the body forward:
Proposed scope
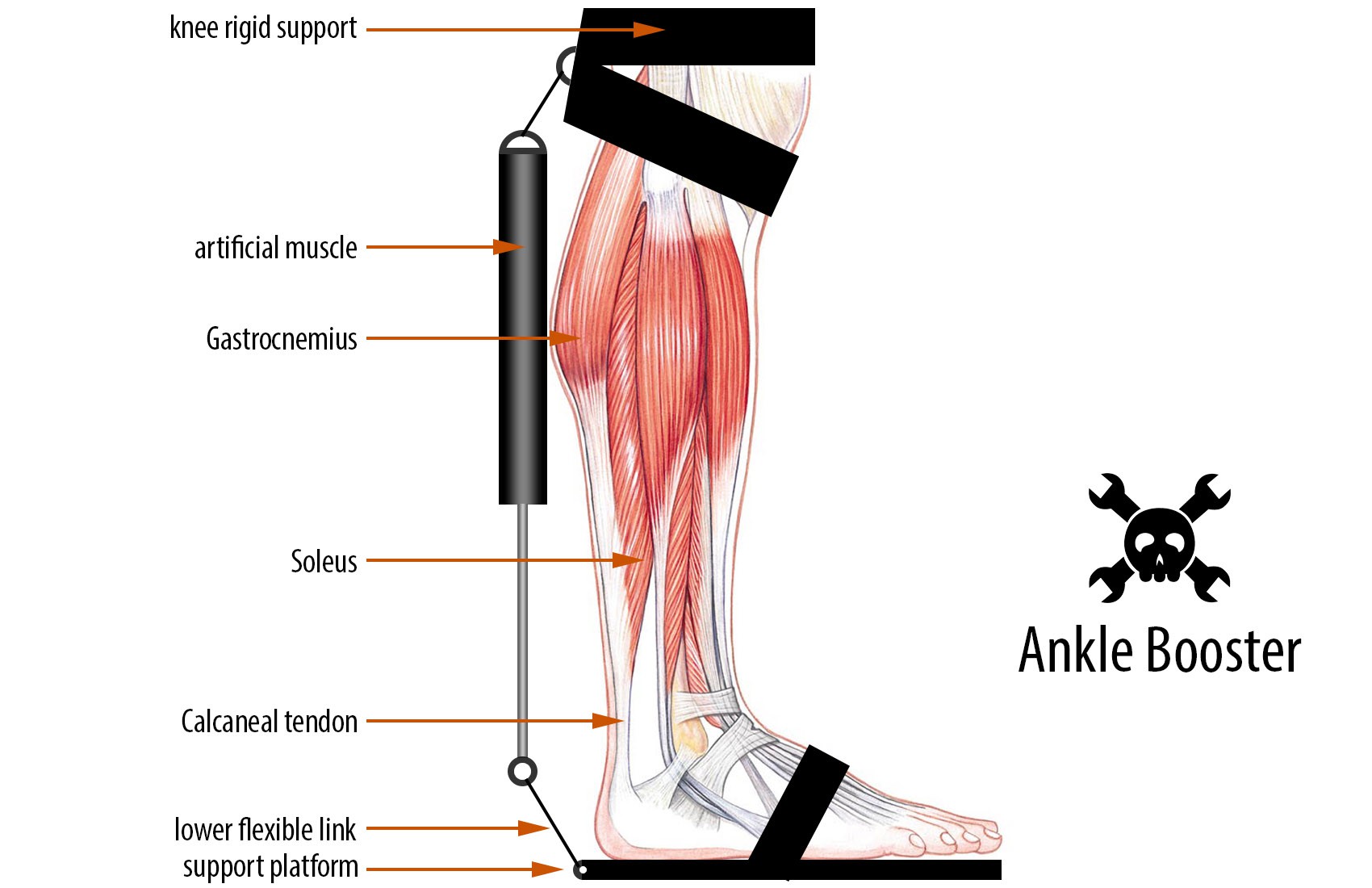
Build a device that can be attached to the lower legs, and assist the Soleus muscle in the ankle movement used for running. It is immediately obvious that a device that contracts is sufficient for this scope.
The working principle
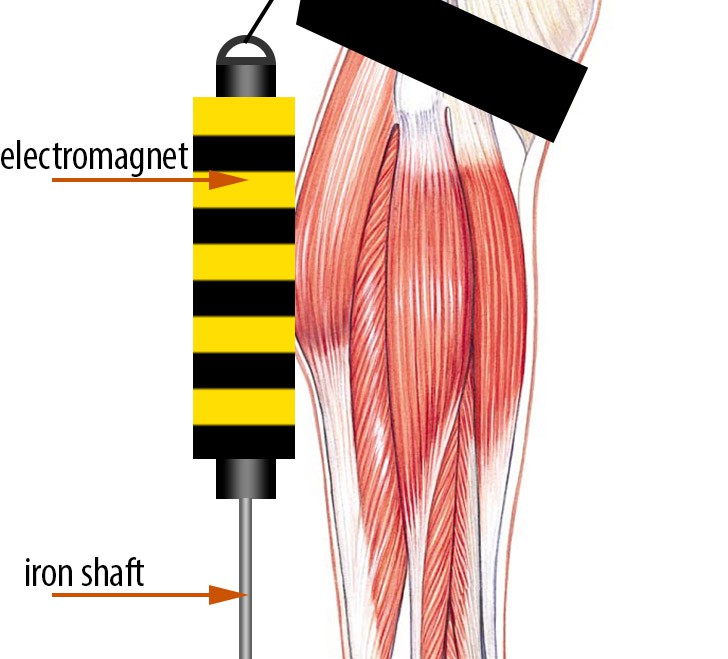
An artificial muscle repeatedly pulls the heel up at precise timing, synchronised with the Soleus muscle contractions. The synchronisation can be triggered by an accelerometer sensor, part of the assembly.









 MECHANICUS
MECHANICUS
 Matthew Borgatti
Matthew Borgatti
 Nelson Phillips
Nelson Phillips
hey i was wondering if this is still ongoing