 ben.phenoptix
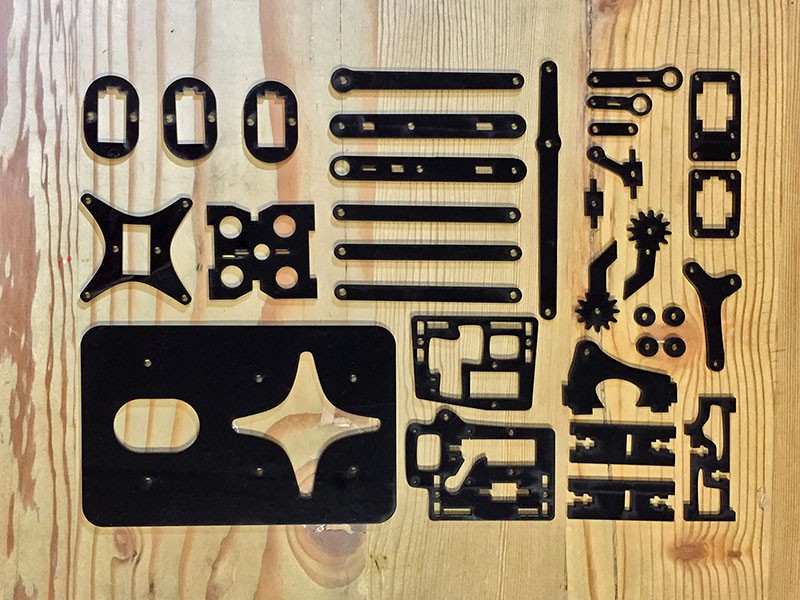
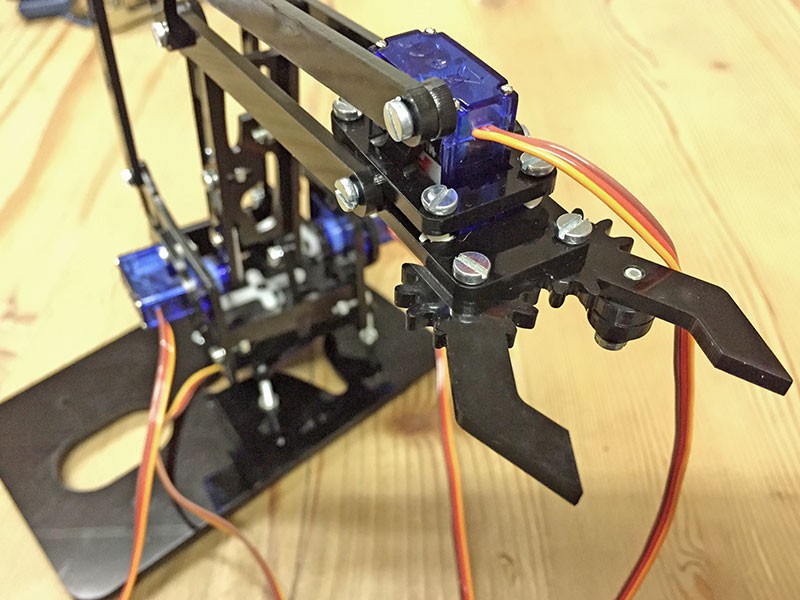
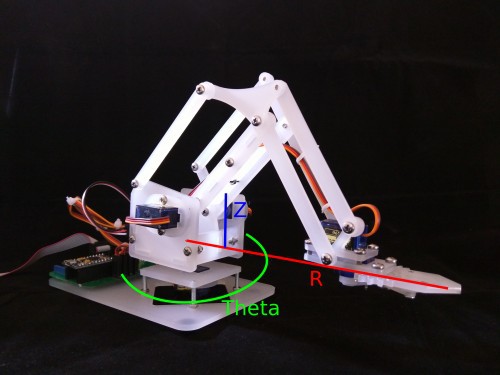
ben.phenoptixThe MeArm is an Open Sourced Robot Arm. It's small, like pocket sized and that's for a reason. It can be cut entirely from an A4 (or more accurately 300x200mm) sheet of acrylic and built with 4 cheap hobby servos. It's live on our site for about $35 or £25 for those in the UK. All the files are linked on this project page and hosted on thingiverse. It supposed to be an educational aid, or more accurately a toy. It still needs some tinkering but is at a good first draft state. There will be more instructions coming and no doubt more tweaks too.
Please get involved, build your own, break it, improve it and break it again.

 25 were made for the event and boy were they made for the event! All assembled in the bar the night before the event by hard pressed Hackaday staff or by myself and willing volunteers at the prize party. Being tired and emotional at the end of the MeArm build marathon it seems I forgot one thing! The spares! We'd actually produced 28 as we expected there to be a few breakages. Since they were minimum it means we actually have three Limited Edition Hackaday Prize MeArms (numbered 26/25, 27/25 and 28/25) left!
25 were made for the event and boy were they made for the event! All assembled in the bar the night before the event by hard pressed Hackaday staff or by myself and willing volunteers at the prize party. Being tired and emotional at the end of the MeArm build marathon it seems I forgot one thing! The spares! We'd actually produced 28 as we expected there to be a few breakages. Since they were minimum it means we actually have three Limited Edition Hackaday Prize MeArms (numbered 26/25, 27/25 and 28/25) left! The MeBrain is an Arduino-Compatible built on the Mega32u4. We want to make it as simple as possible to use the MeArm, but also pack so much cool stuff under the hood that you can't help but want to tinker.
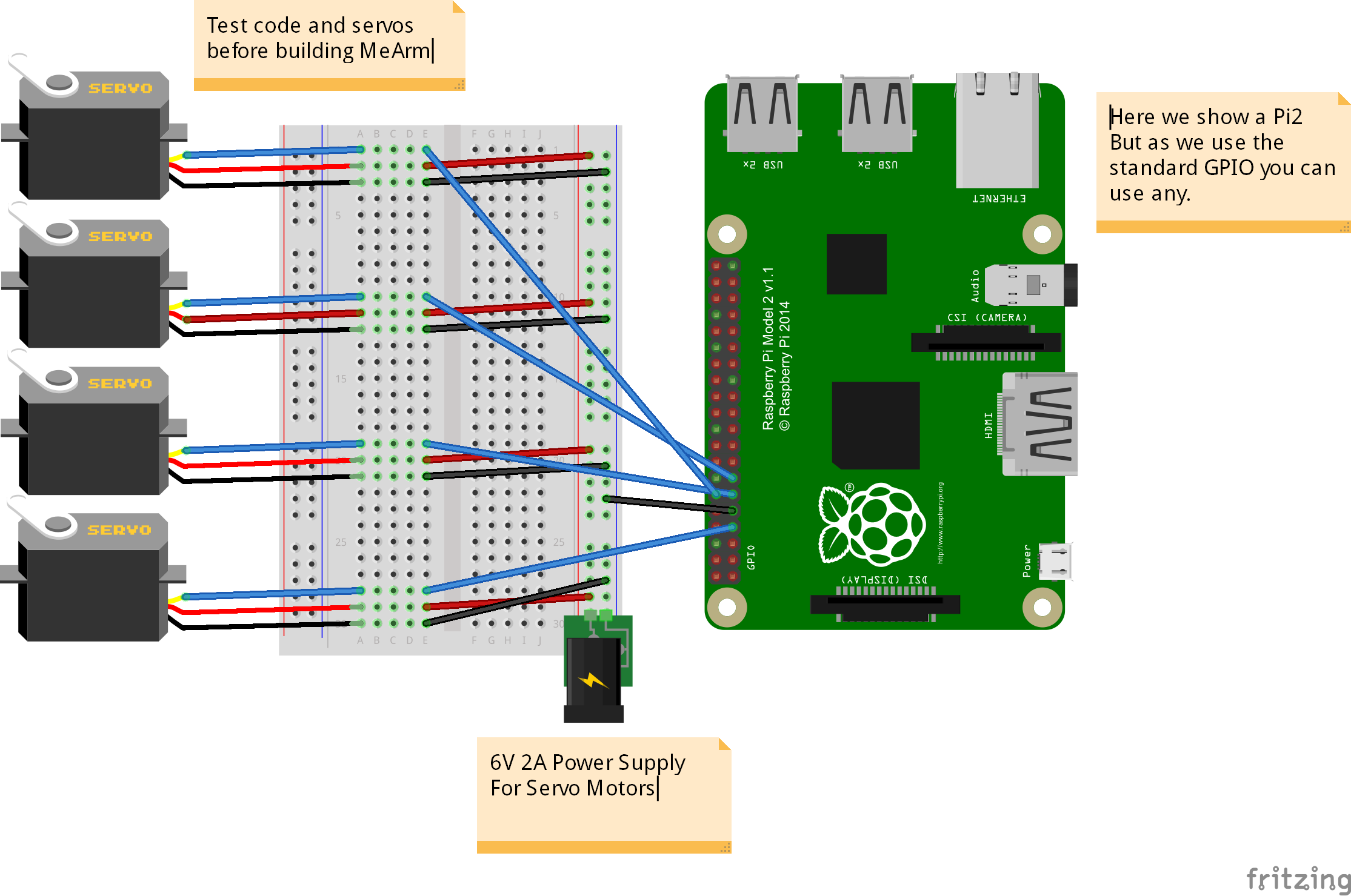
The MeBrain is an Arduino-Compatible built on the Mega32u4. We want to make it as simple as possible to use the MeArm, but also pack so much cool stuff under the hood that you can't help but want to tinker.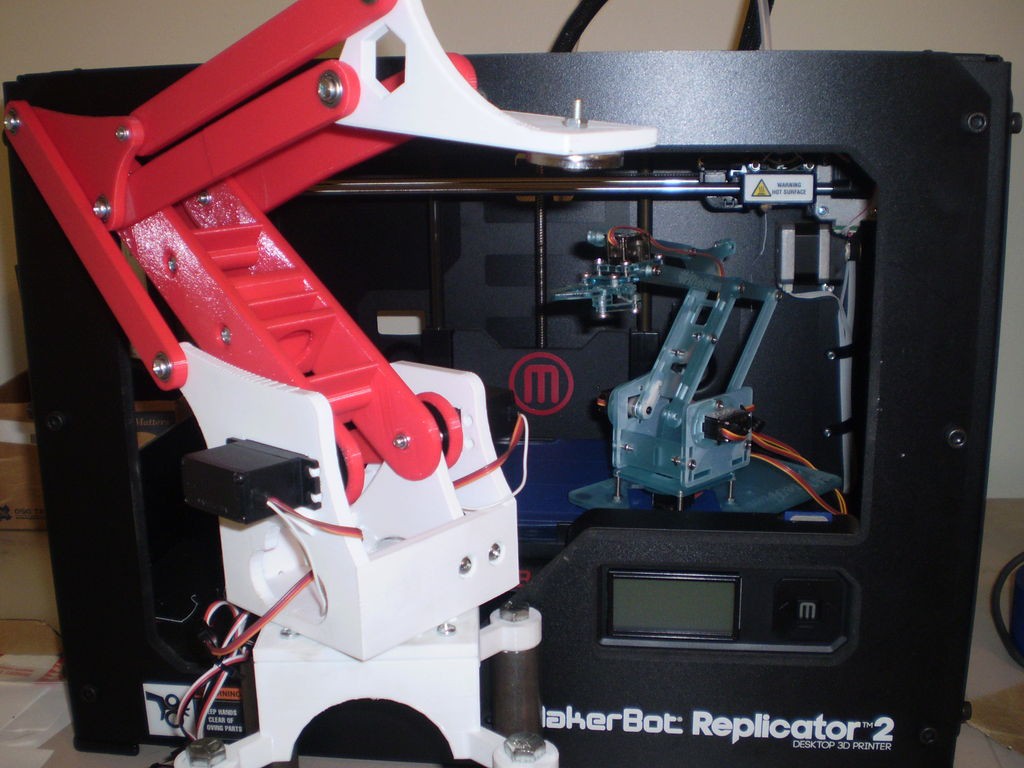










 Rudolph
Rudolph
 Mike
Mike
 barb
barb
interesting
took me ages to read
funny enough, when i went to download the design from thingiverse a related one looked a lot better and had a lot more downloads so i went for that one instead so i wasted my time i guess