 shlonkin
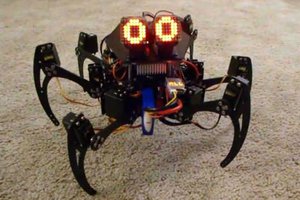
shlonkinThese three little autonomous vehicles have a lot of similarities such as controller, battery and movement mechanism, and they all percieve the world through photo-transistor eyes. But they are all distinct designs with different capabilities and behaviors. They are the first members of a growing family of miniature robots that I have been playing with off and on for a long time
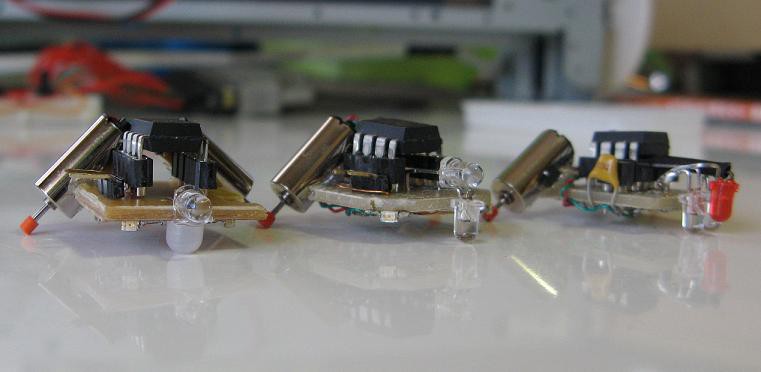
A key aspect of their design is at least one photo-transistor eye and one controlled LED. This allows them to interact in a meaningful way. Depending on how they are programmed, this could be as complex as data transmission between bots or as simple as interfering with the sight of other bots. The resulting interaction would also depend on the type of bots. For example, the eyes of robot 1 point downward to scan the surface, while robot 3 only looks forward.
At this point I have not programmed them for any complex interaction. Their main behavioral features are thus:
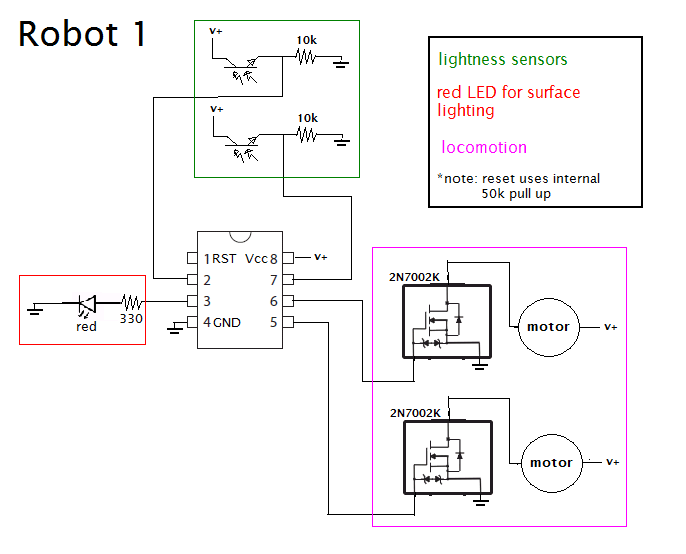
- Robot 1 - Has left and right eyes looking down. Can detect lightness patterns on the ground. Here is a video of it acting as a line follower.
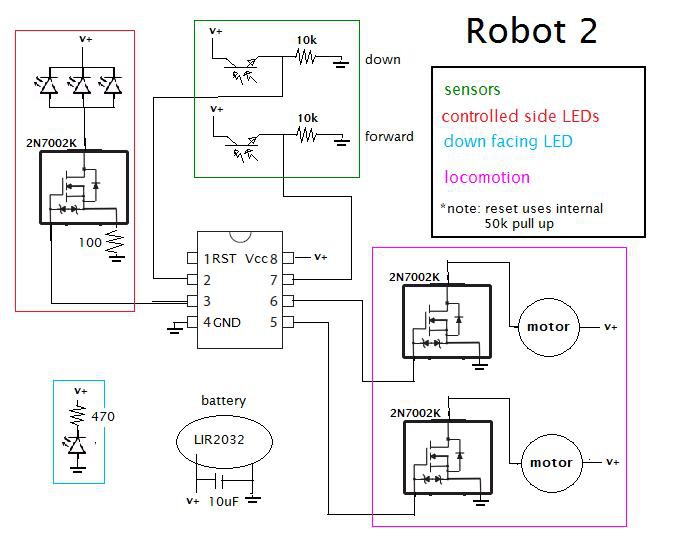
- Robot 2 - Has one downward eye and one forward. Controlls a group of LEDs around its perimiter. It can see the lightness of the ground and look forward. It can also signal in all directions with the LEDs.
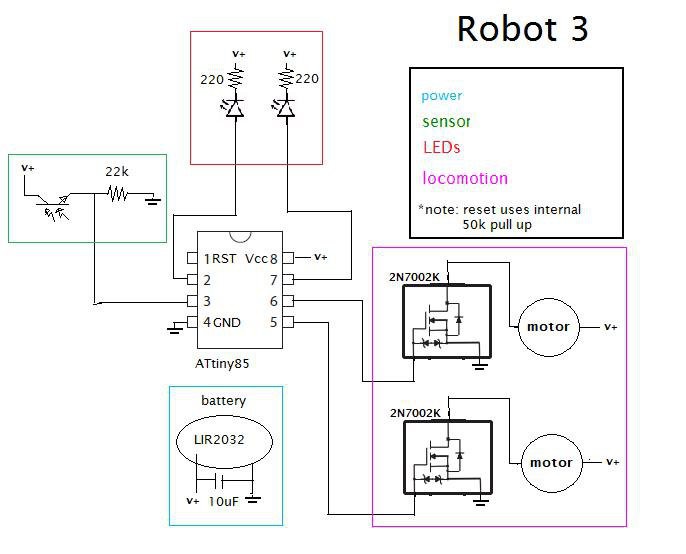
- Robot 3 - Has one eye looking forward and two separately controlled LEDs pointing about 45 degrees to either side. It is supposed to be able to detect obstacles and determine which direction to turn to avoid them. I am still developing this feature.
The hardware:
The controller could be any of the 8-pin ATtinys. I have used the tiny85 because that's what I had on hand. I have considered a version based on the ATtiny10, but haven't gotten around to that. The batteries are LIR2032 rechargeable lithium coin cells that I pulled out of some solar key chain lights from the 100yen shop(dollar store). They don't last very long between charges, but I'm not planning on spending much money for fancy new batteries.
Here is the underside of each one.
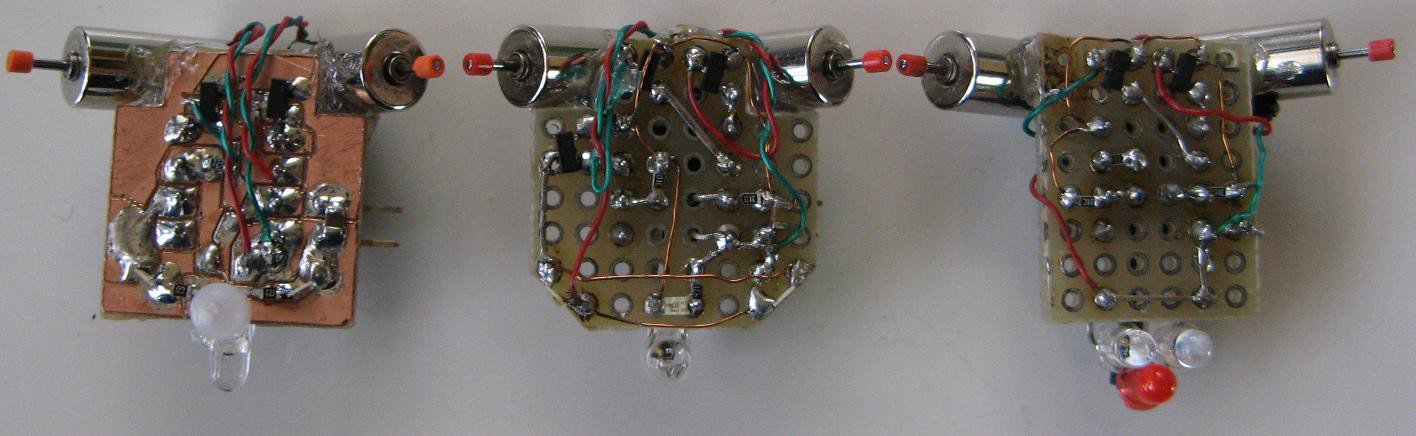
You can see the 2N7002K mosfet transistors for driving the motors. There are also various resistors, capacitors and LEDs. The schematics are here:
The software:
At this point, the software is very simple, but it is easy to add another behavioral pattern in the code since the main loop simply calls a behavior function. Robot 1 has a line following bahavior. Robot 2 scans the ground and can signal to other robots in the area. Robot 3 avoids obstacles(still working on that one). I would be willing to upload the current code if requested, but since it is continually changing and far from complete, I won't put it here just yet.
If I make new robots, videos, changes etc. I will post a log here about it.











 Duane Degn
Duane Degn
 lbinder
lbinder
 karen.soledad.quezada
karen.soledad.quezada
 Timothy Vanco
Timothy Vanco
my IR-proximity sensor project may help to improve your robots enviroment sensing ;)
https://hackaday.io/project/184972-proximity-detector-for-microrobots