0%
0%
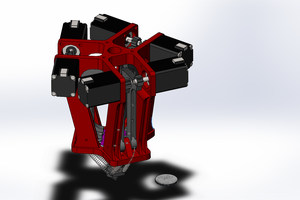
Small Minimal Heliostat
A heliostat with integrated motors to minimize mechanical complexity, for use in cooking, smelting and energy production.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 David Brown
David Brown
 Tobias
Tobias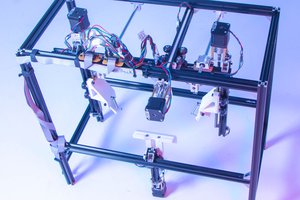

 Sam Baker
Sam Baker
I have a simpler motion control for 3 axis motion if your interested: its 3 ball joints in a triangle, that stands on 3 legs, two of the legs can be extended and retracted via a threaded rod turning in a nut welded to a tube (basic linear actuator) the other is fixed in length. By extending or retracting the legs a relatively short distance a substantial angle can be achieved with fine threads for the extend/retract motion, the position is very solid when at rest. Motion is slow, but suitable for a sun tracker. I'm building a prototype in a couple months, busy with a bigger projects at present, I have some old 3D models somewhere, the first prototype uses two small 24v DC motors with integrated encoders from an ID card printer... I don't check hackaday much, so if you like, feedback to cubespawn at gmail, Cheers!