 SouthMade
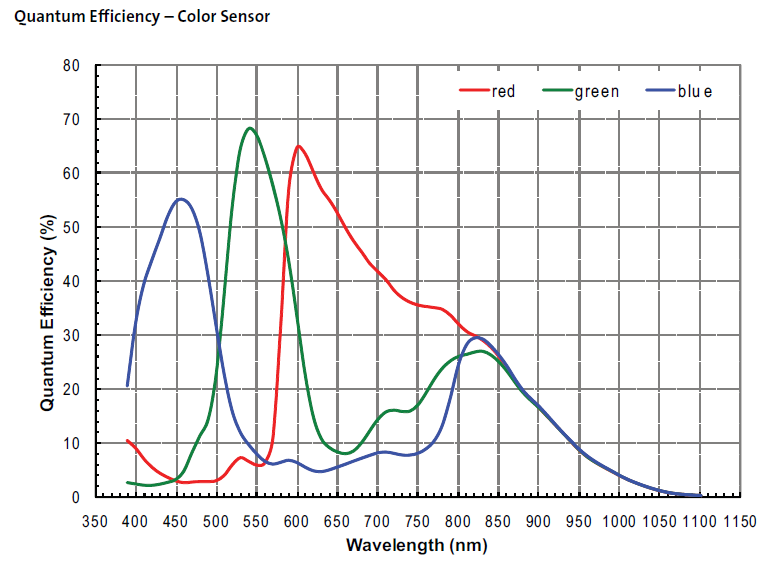
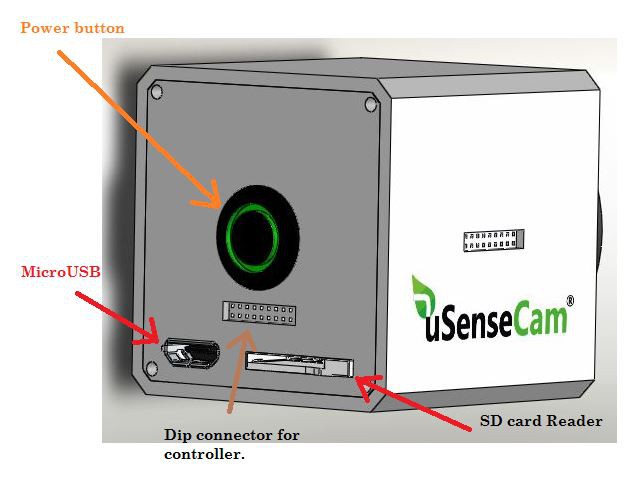
SouthMadeuSenseCam would monitor the plants reflectance of visible and near-infrared radiation.
Farmers would use aerial multispectral images taken by uSenseCam to monitor the plant growth and other functions helped by vegetation indices . The future application will be biology, forestry, environmental research, surveillance, and infrastructure inspection.
The chosen bands are based on LandSat 7.





 Bruce Land
Bruce Land
 Anthony
Anthony

 Jeremy g.
Jeremy g.
Awesome guide! Thanks for sharing with us!
https://1921681254.info