 Laetitia BEL
Laetitia BELhe idea of this project is to create an open source drone platform that can be easily hackable.
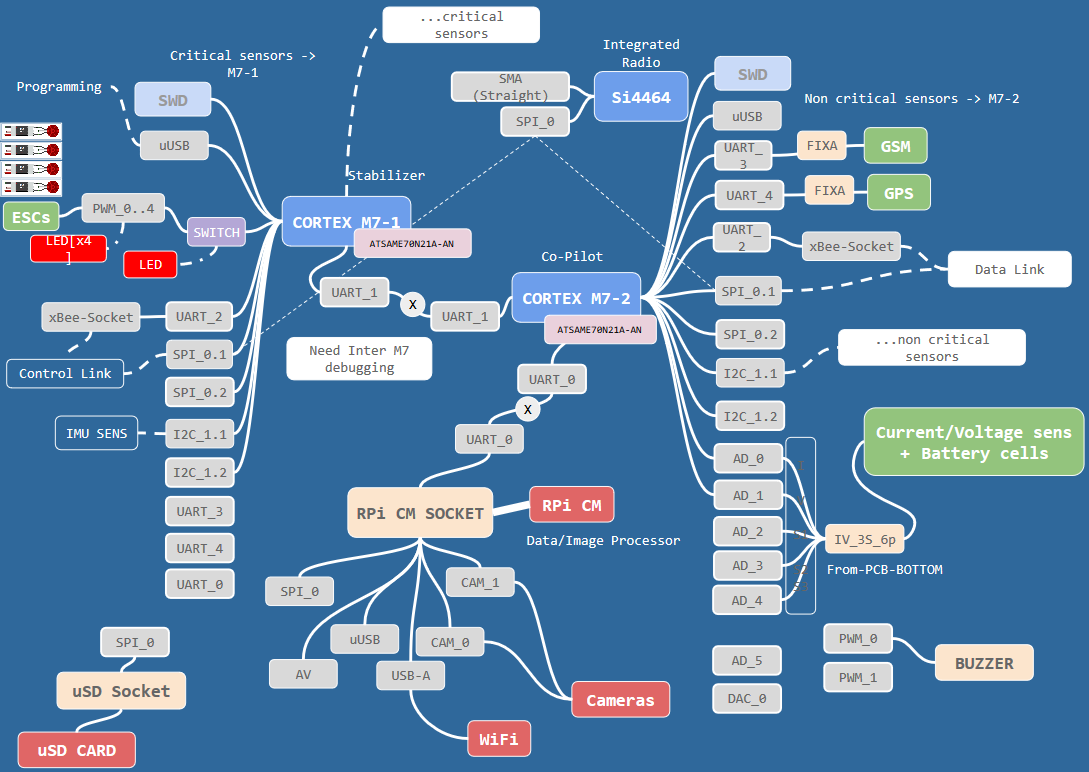
It uses the last powerful Atmel's microntroller @300Mhz, the SAME70. Actually it will embed two of them. The dual SAME70 uC handles the computing (stabilization, sensors interface, GPS, communication,...etc).
They will be associated to a Raspberry Pi Compute Module for navigation and heavy computation. Also used for, this is the favorite part, its dual camera handling.
The dual cameras can be used natively in the platform for stereo-vision or NDVI processing for example.
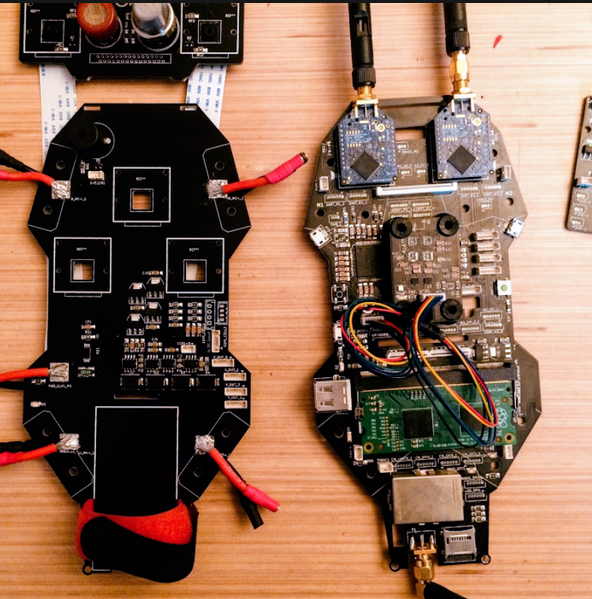
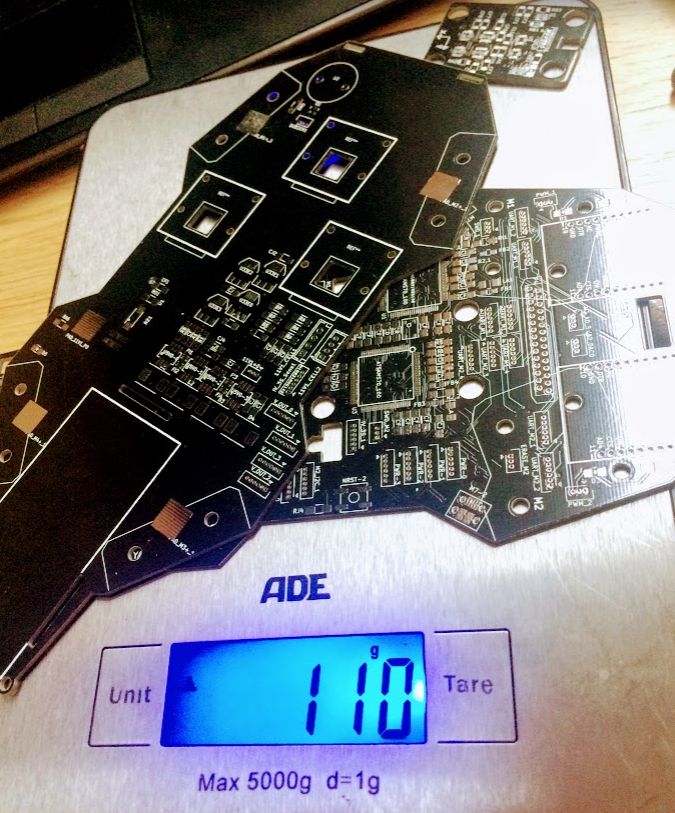
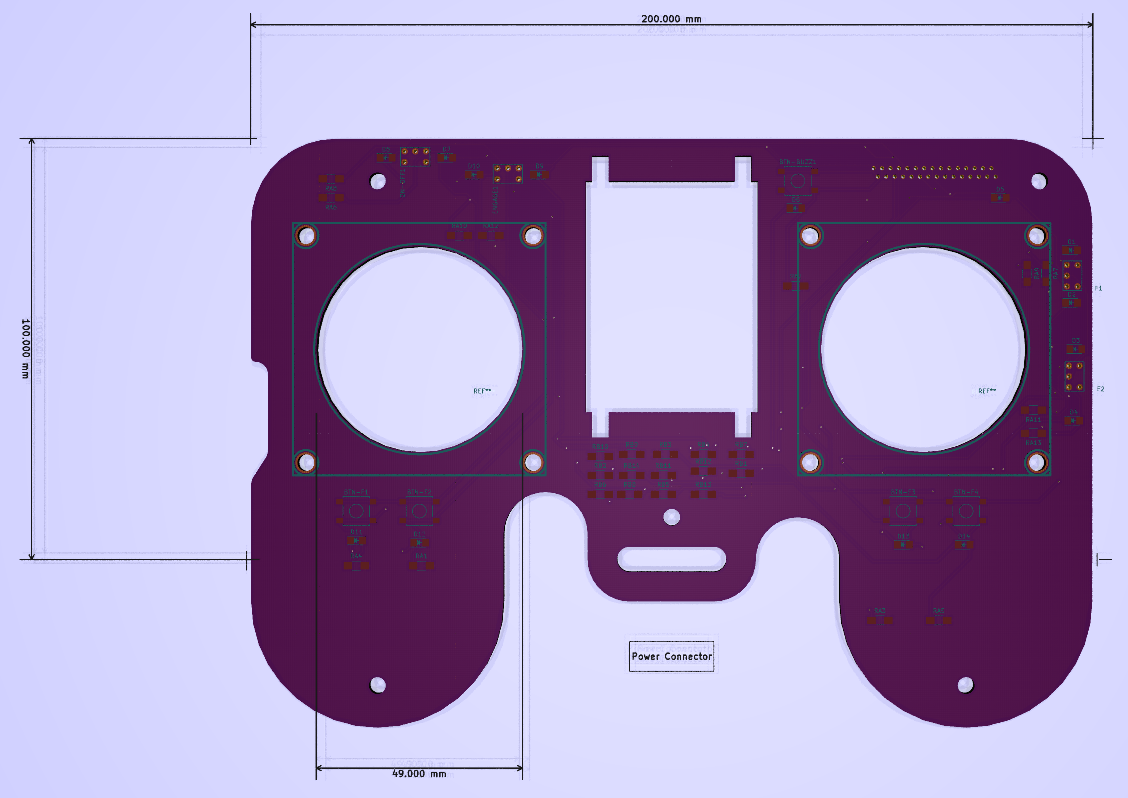
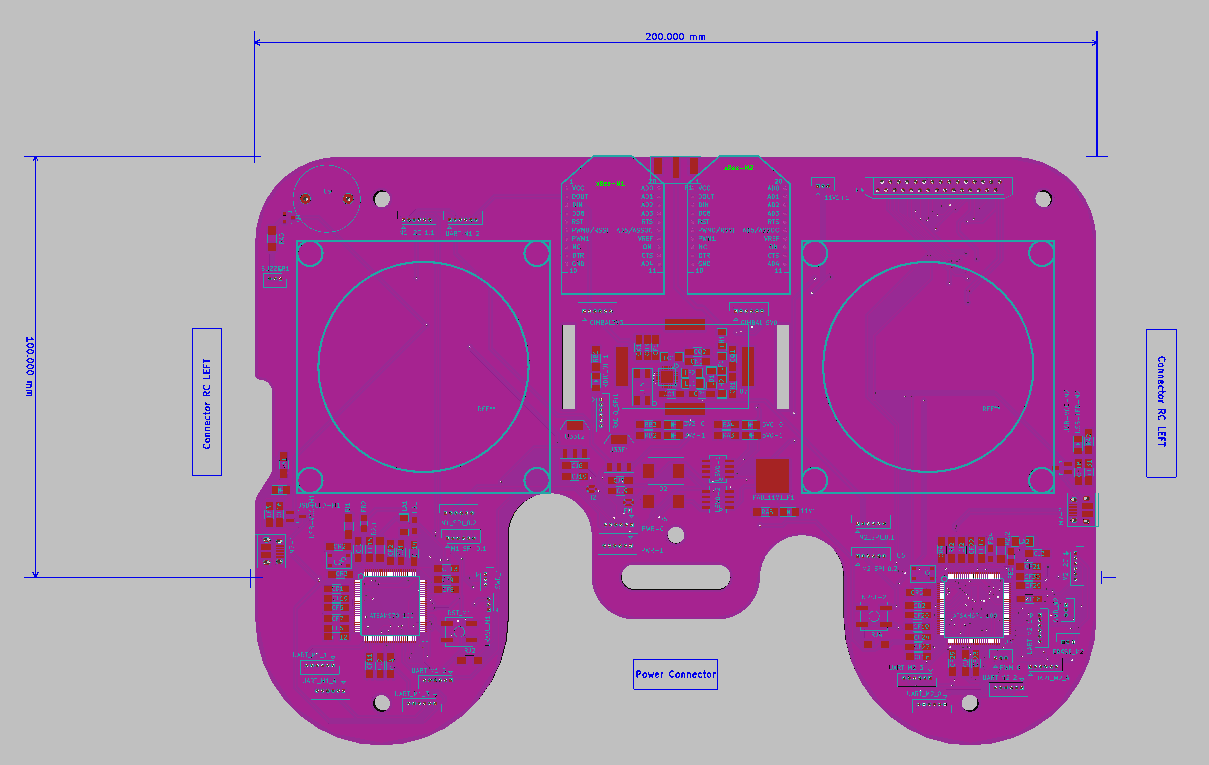
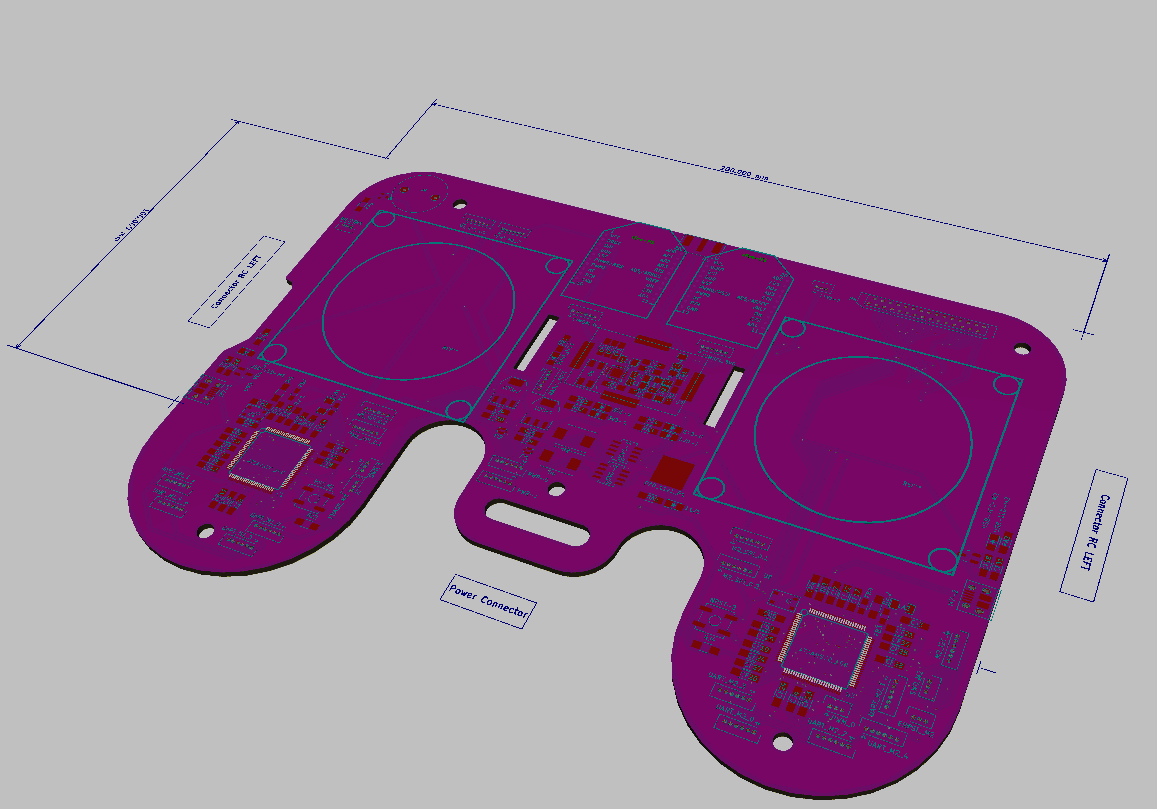
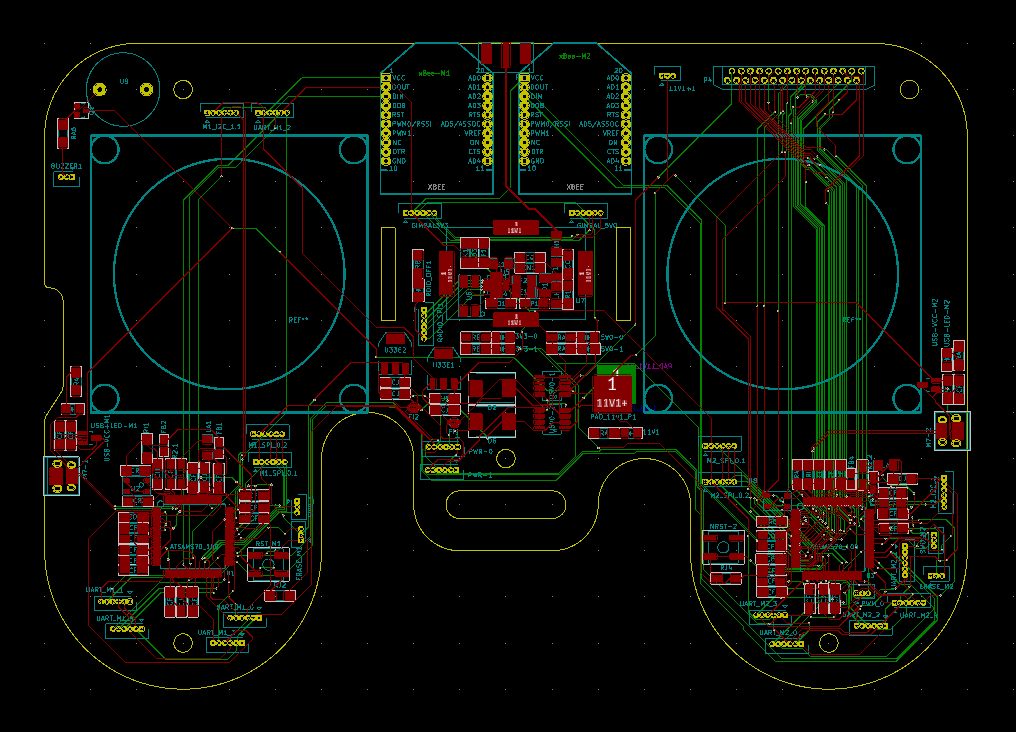
All the circuitry will be embedded in the platform, it will be part of the mechanical chassis. The PCB of the electronic circuit are the chassis of the drone. There will two main PCB, the top one for the calculation circuitry, and the bottom PCB will handle the power distribution.
The first step is to build and setup the platform (electronics and mechanics parts) then start building a SDK (porting Pixhawk) that can facilitate the software development on the platform.
Key features:
- 2x ARM Cortex-M7 running at up to 300 MHz / 16 Kbytes of ICache / 16 Kbytes of DCache with Error Code Correction (ECC)
- 2x 1024Kbyte Flash, 2x 384Kbyte SRAM
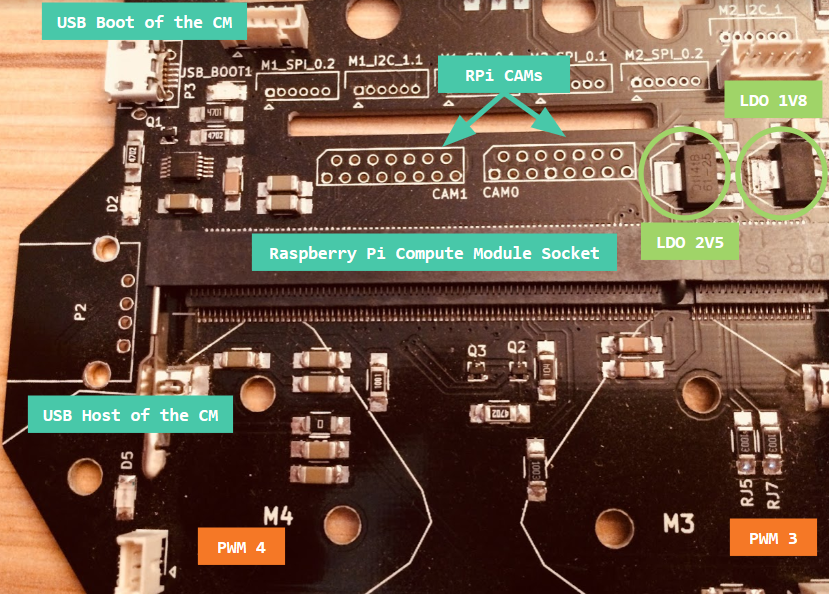
- 1x Raspberry Pi Compute Module socket
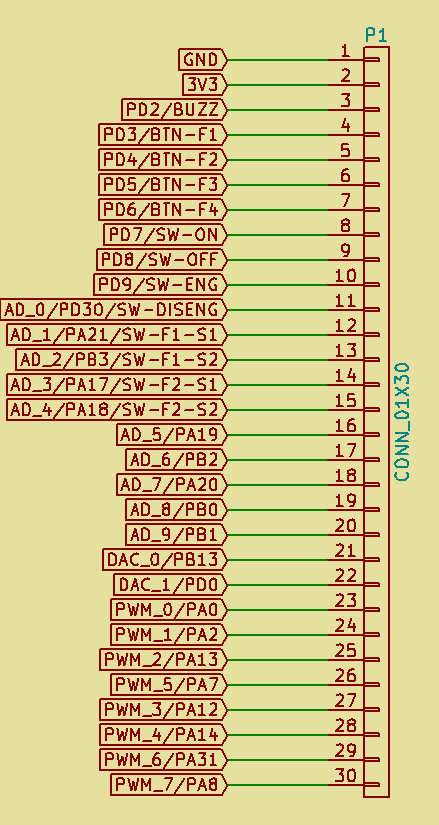
- 12x ADC 12-bits, 12xDAC 12 bits, 5xUART, 3xSPI, 2xCAN, 3xI2C,
- 16 xPWM
- microSD card for high-rate logging over extended periods of tim
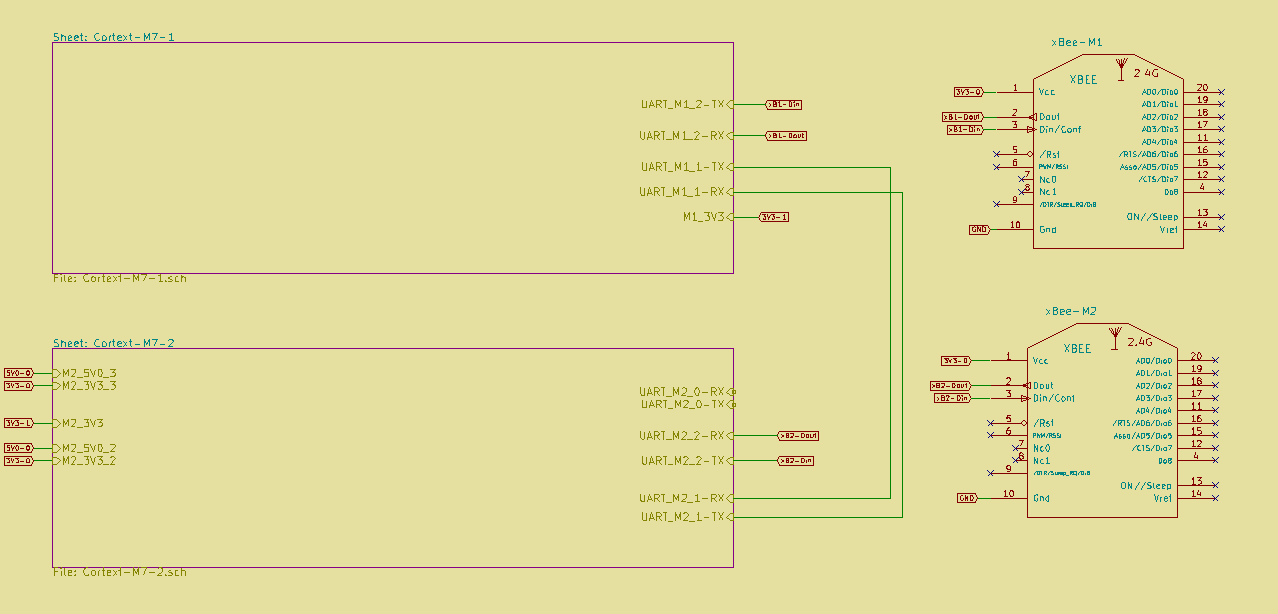
- 2x xBee communication modules
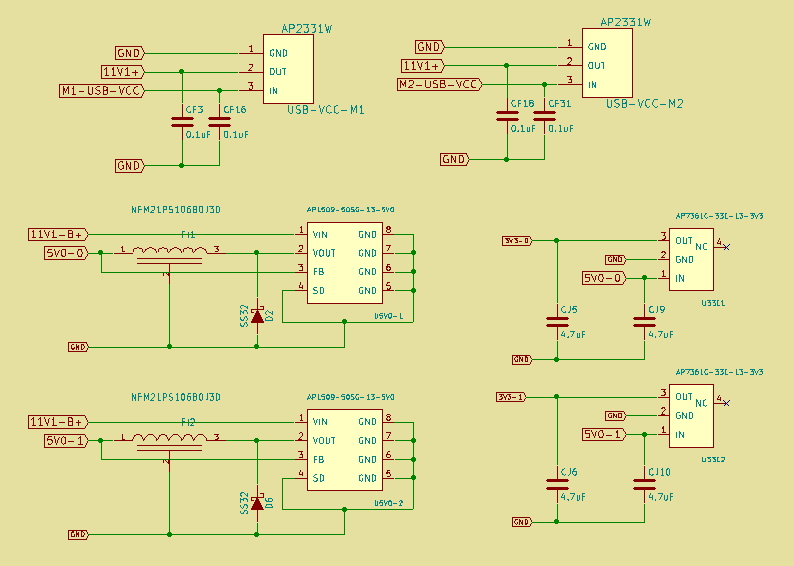
- Integrated power distribution
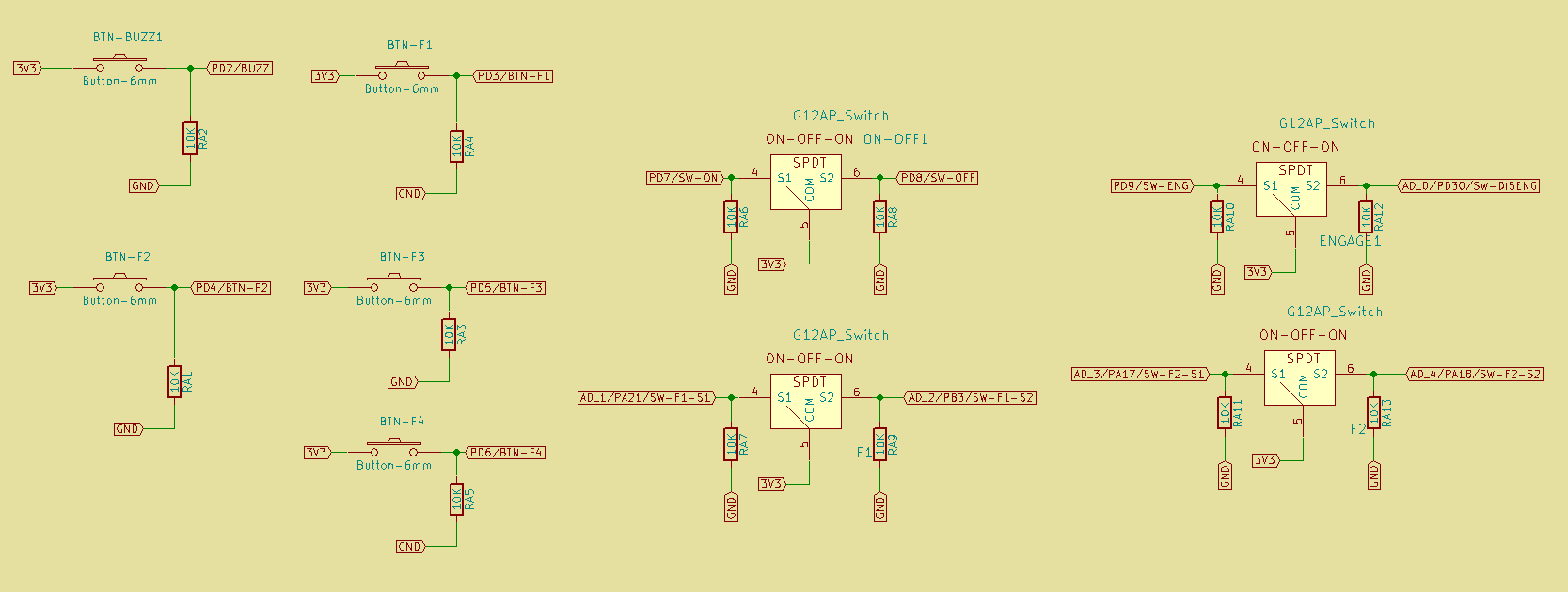
- Customized sensor panel for more sensors
- 2x Raspberry Pi Cameras that can be placed in the front or the bottom of the drone
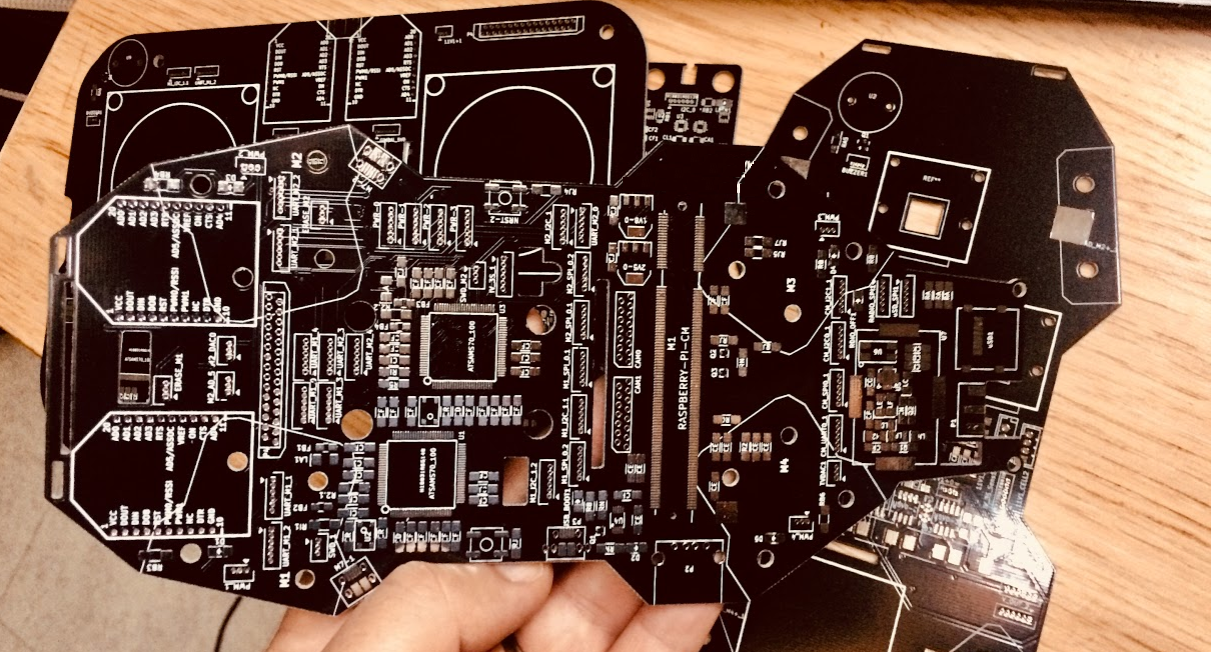
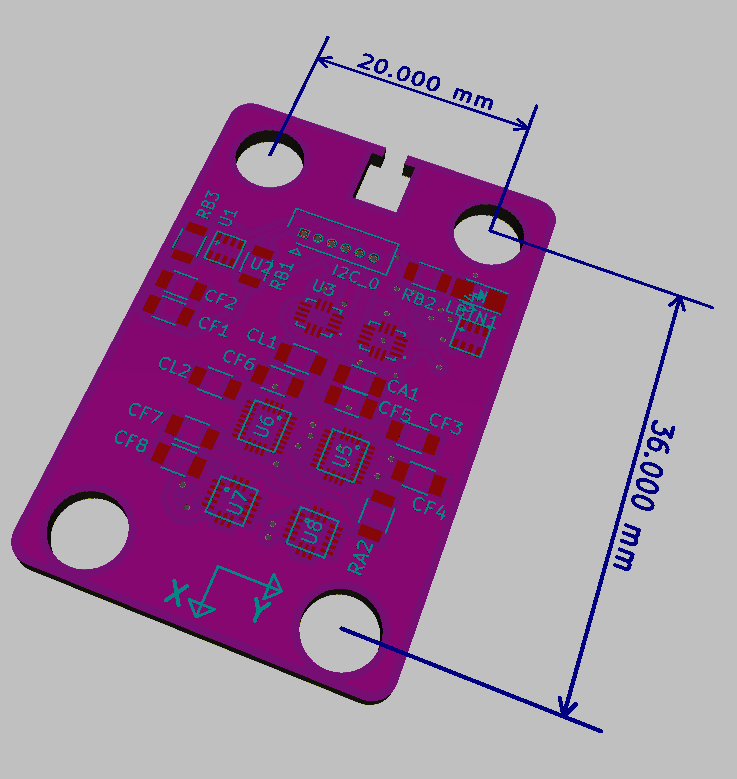
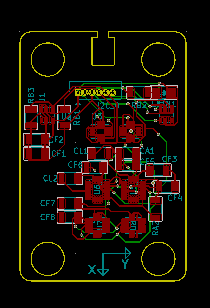
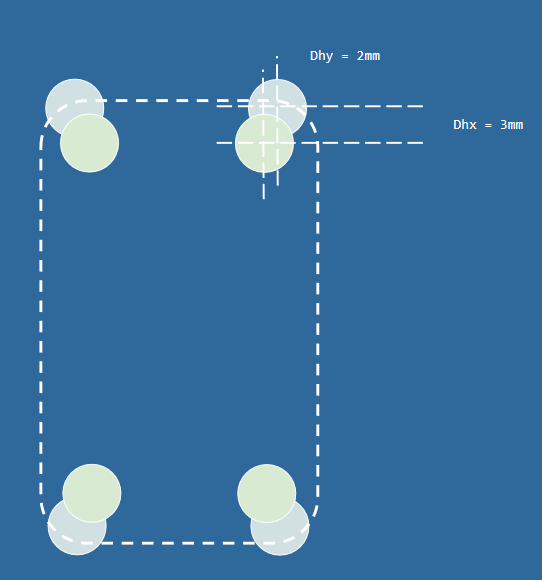
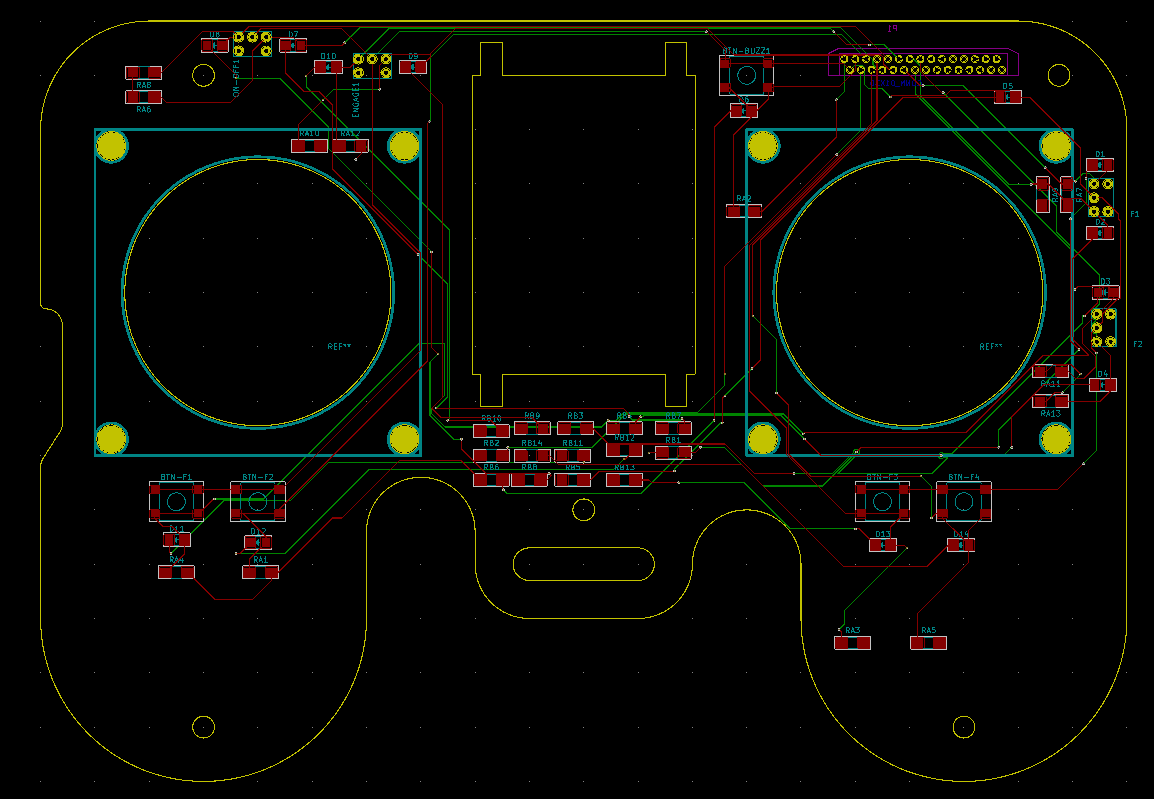
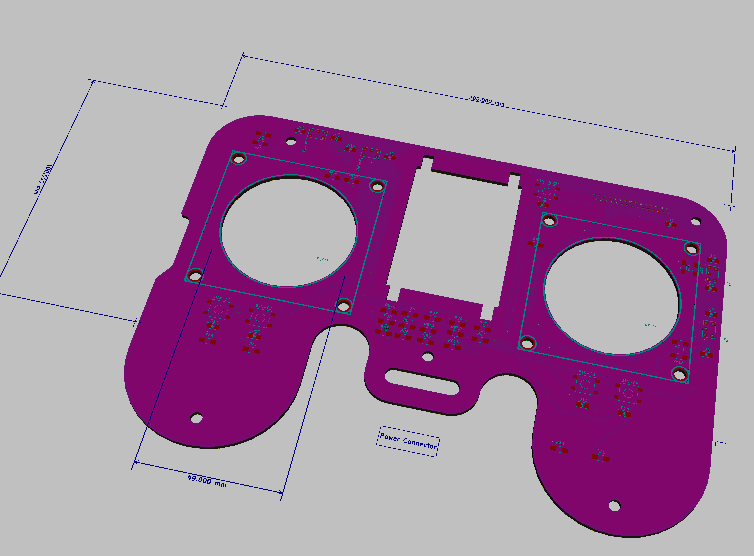
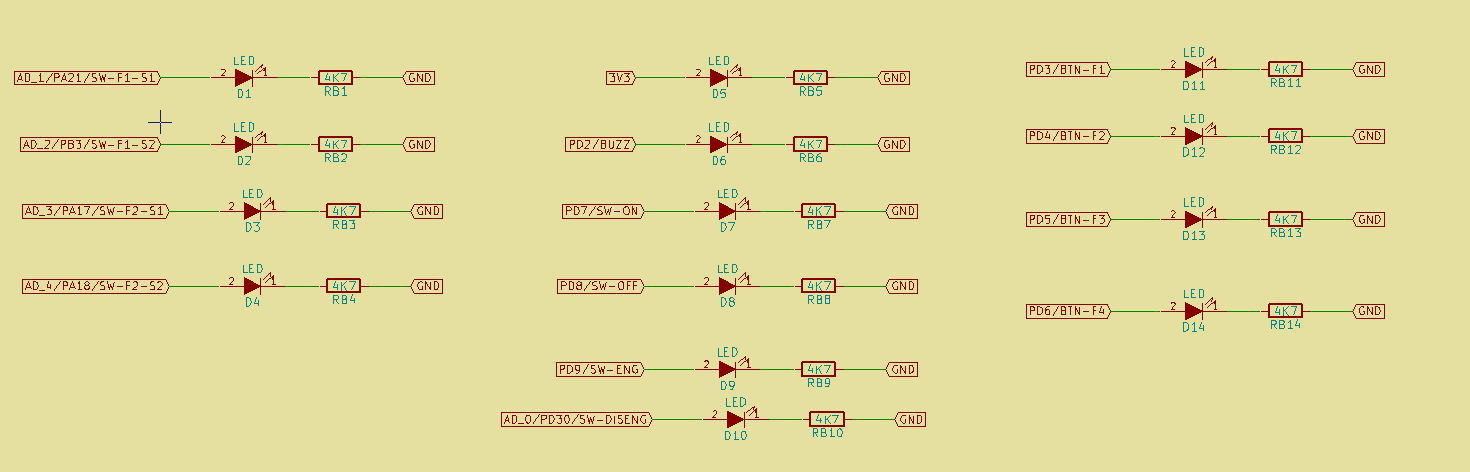
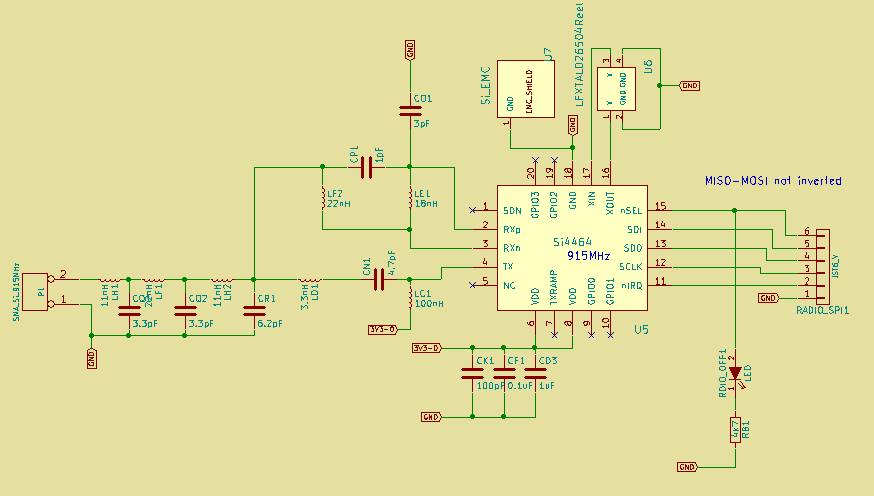
TOP PCB design
The circuits are designed using Kicad big thanks

The work on the software is ongoing, the software behind will be: PX4/Firmware from with porting the DroneCode's api DroneCore


 T
TI love the Pi! specially the Raspberry Pi Compute Module
The assembled computation modules:
 It supports up to 2x Raspberry Pi Cameras and 1x Raspberry Pi Compute Module.
It supports up to 2x Raspberry Pi Cameras and 1x Raspberry Pi Compute Module.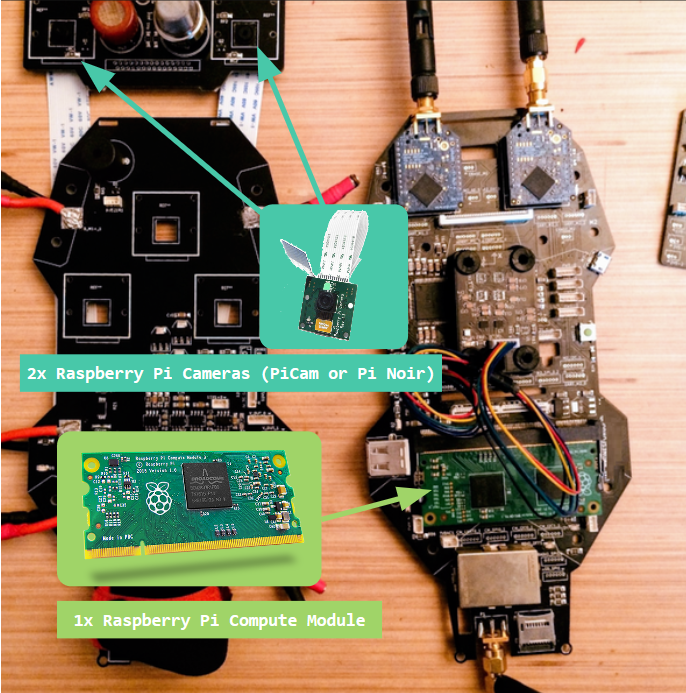
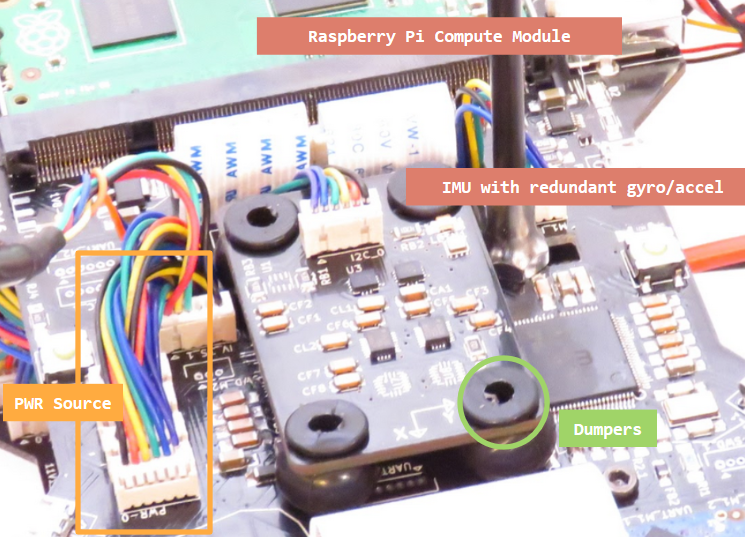



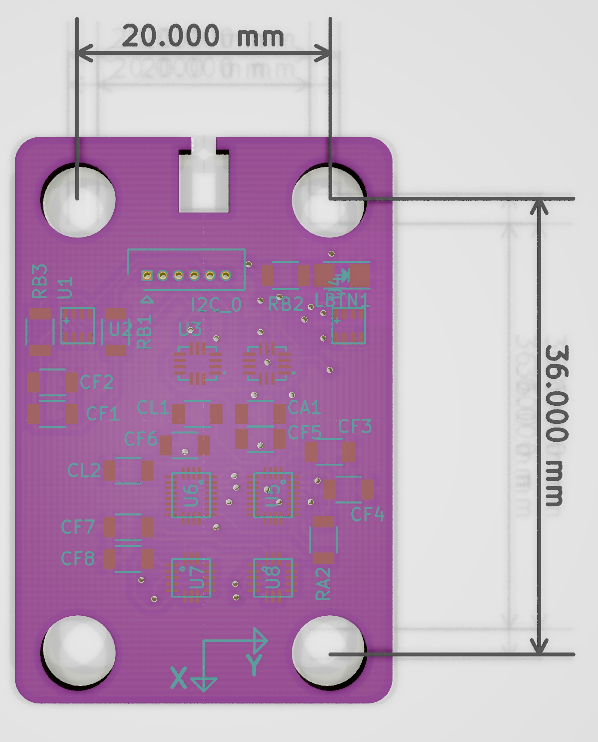
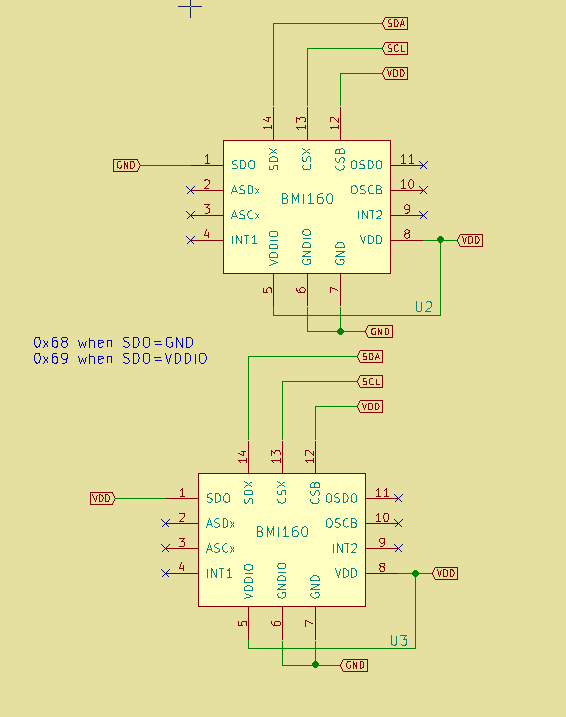
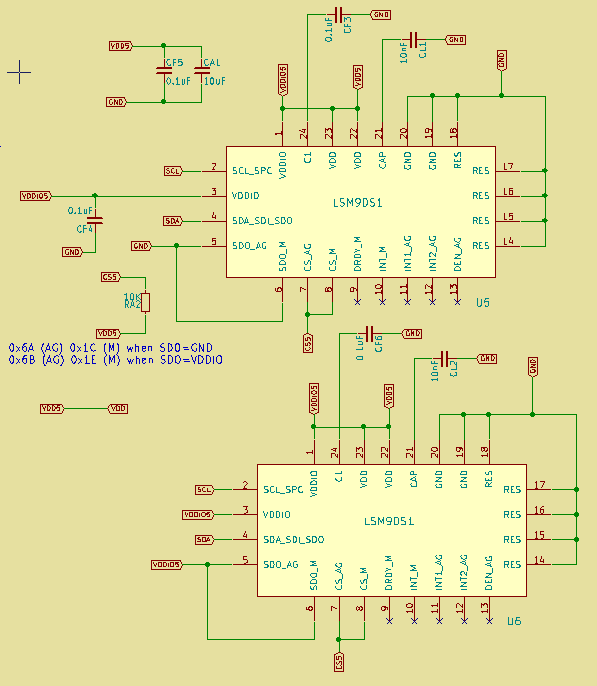 2xLSM6DS33:
2xLSM6DS33: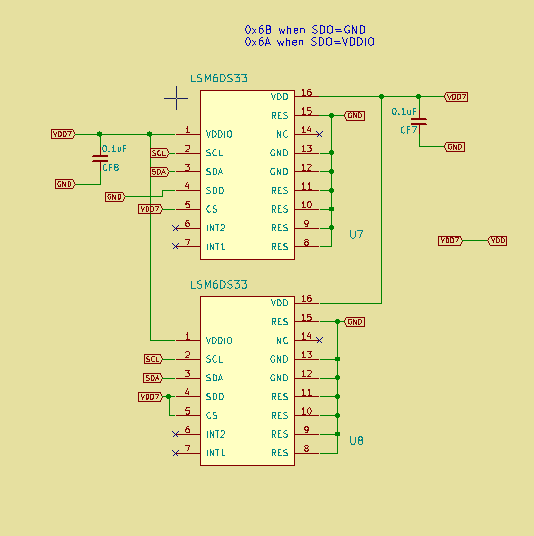






 Lithium ION
Lithium ION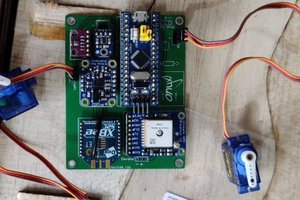
 teamonyxindia.engg
teamonyxindia.engg
 Jelto
Jelto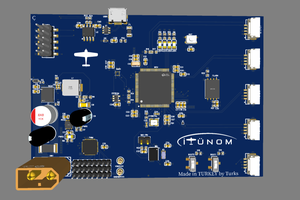
 Umut Çağrı MANGALTEPE
Umut Çağrı MANGALTEPE
Hi
Nice to meet you after viewing your profile i am Jacinda, from (jakarta) indonesia,
i have a project discussion with you please email me on: (jacinda.seiler@yahoo.com)