 David Galdeano
David GaldeanoThis project is organised as follows:
Setup:
Step 1 : Fresh install of raspbian
Step 2 : Installation of ROS on Raspbian
Step 3 : Catkin workspace and tutorials
Build steps:
-base
-
Low level API:
-motors
-camera
-sonar
Control the robot:
...
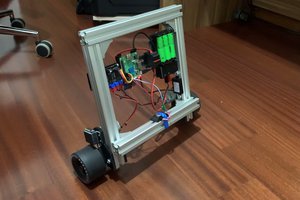
This project is design to help to start with ROS (Robot Operating System) on a low cost platform.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
This project is organised as follows:
Setup:
Step 1 : Fresh install of raspbian
Step 2 : Installation of ROS on Raspbian
Step 3 : Catkin workspace and tutorials
Build steps:
-base
-
Low level API:
-motors
-camera
-sonar
Control the robot:
...
...
The creation of a new robot start by setting up the needed tools.
In this step we will install a fresh Raspbian OS (from windows OS).
If you already have a SD card with Raspbian, you can go to Step 2.
1 - Download Raspbian
Download Raspbian :
https://www.raspberrypi.org/downloads/raspbian/
Click on the "Download ZIP" button of the Full desktop image.
Extract the image file from the archive.
2 - Format the SD card
Download SD Formatter 4.0 :
https://www.sdcard.org/downloads/formatter_4/
Install it.
Insert your SD card on the computer
In SD Formatter 4.0,
- select your SD card,
- in option, set FORMAT SIZE ADJUSTMENT to ON,
- click format.
3 - Write the Raspbian OS on the SD card
Download Win32DiskImager :
https://sourceforge.net/projects/win32diskimager/
Install it.
In Win32 Disk Imager
- select the Raspbian image file downloaded earlier,
- select the right device,
- click "Write" button and wait,
- eject the sd card.

Thanks for the comment. I did a lot of improvement and I should take the time to download them but I have a busy schedule.
As I am a non-native English speaker, feel free to correct any mistakes.
 Limenitis Reducta
Limenitis Reducta
 Dejan
Dejan

 Audrey Robinel
Audrey Robinel
Somehow it's even more interesting to make ROS work with a very cheap robot (modeling probability for cheap sensors, shaky movement). Some of the work can go into making the performance of cheap drives and sensors better :-) I like the radical low cost approach!