 Alvaro Ferrán Cifuentes
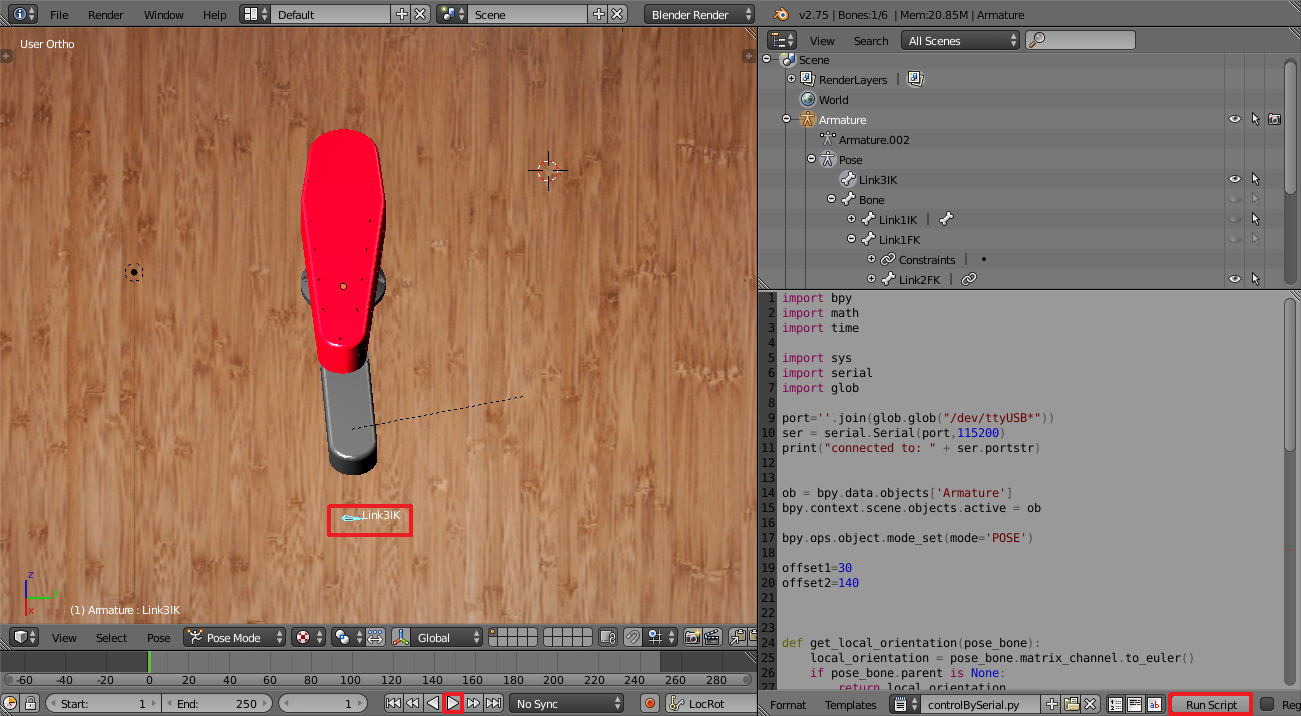
Alvaro Ferrán CifuentesThis python script enables real-time control of a robotic arm in Blender. It works by reading angles from the arm's armature and sending them through the serial port to an arduino controlling the physical arm.
The project has been simplified to provide an easy example of how to get data from blender and to send it to an arduino, and is ready to be used at once.
To start controlling the arm first upload the arduino code into the board. Then open Blender and press on "Run Script" and the play icon (as seen in the image below) and hover the mouse over the arm after pressing the "G" key ("Link3IK" must be selected).
 While the blender file is focused on a SCARA arm, the script works with regular arms as well. Here is a video of it driving Thor:
While the blender file is focused on a SCARA arm, the script works with regular arms as well. Here is a video of it driving Thor:




 igorfonseca83
igorfonseca83
 atomkemp
atomkemp
 Mattias
Mattias
 PixJuan
PixJuan
yes this project is looking like it will be some value in the future bcs there are so many things that i saw in it i also read an article about this project here on https://bestportablestuff.com/best-blender-for-smoothies/