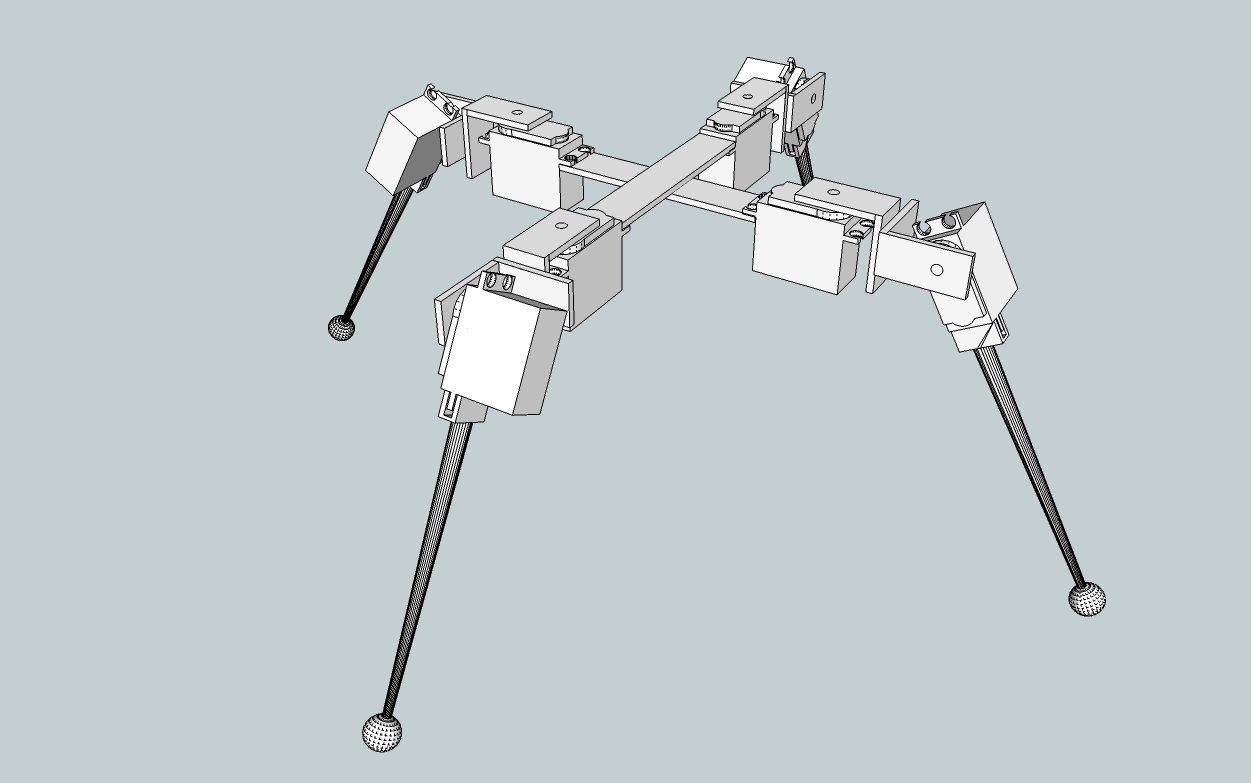
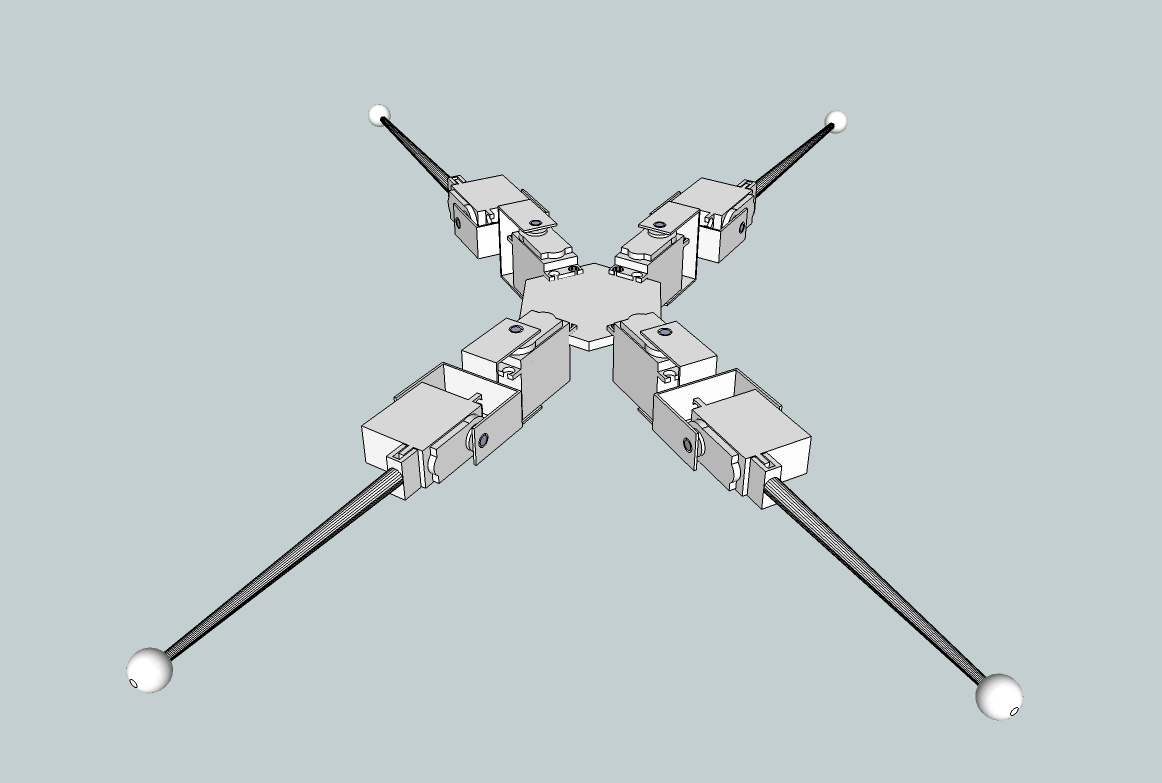
 morgan
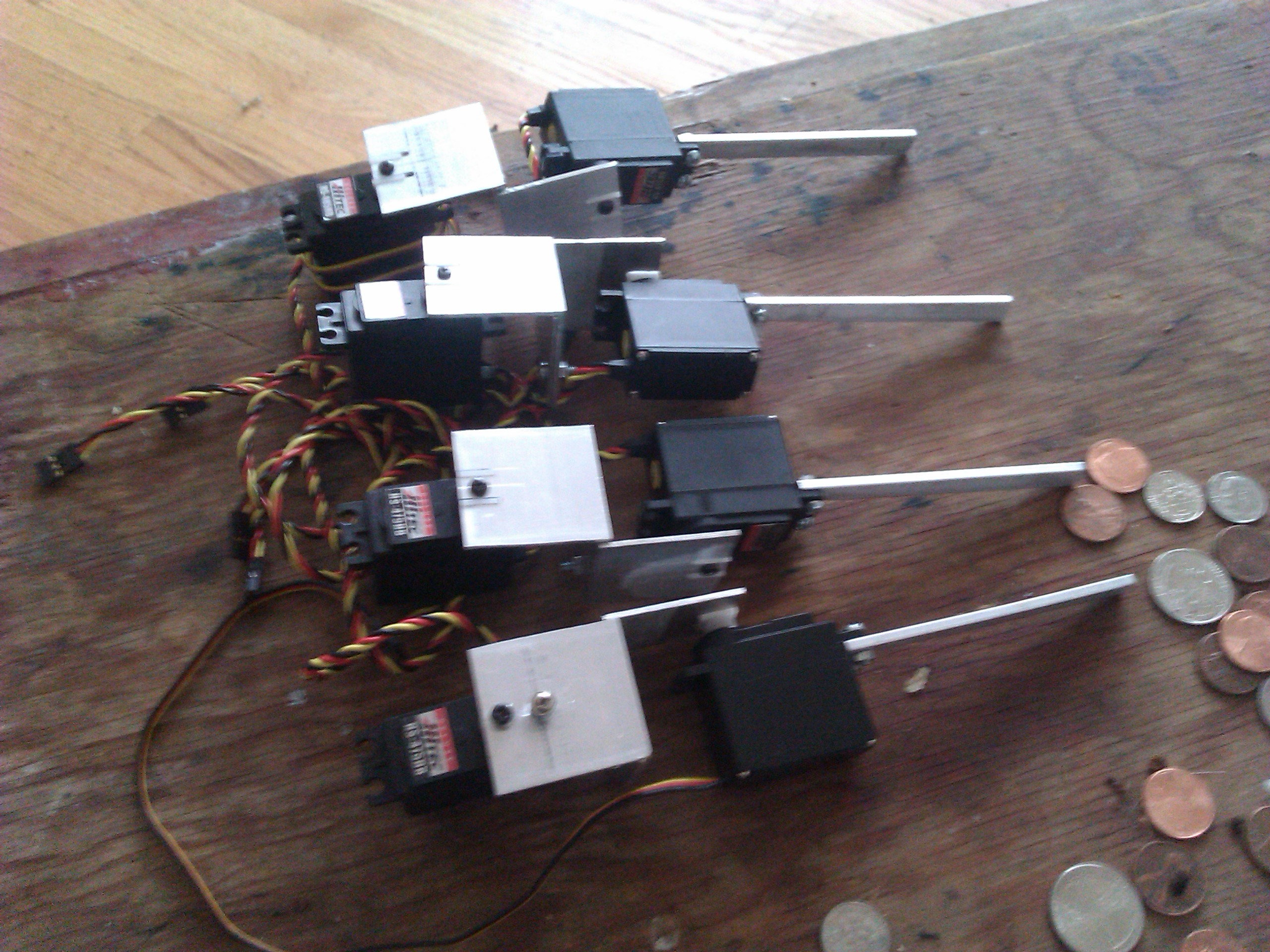
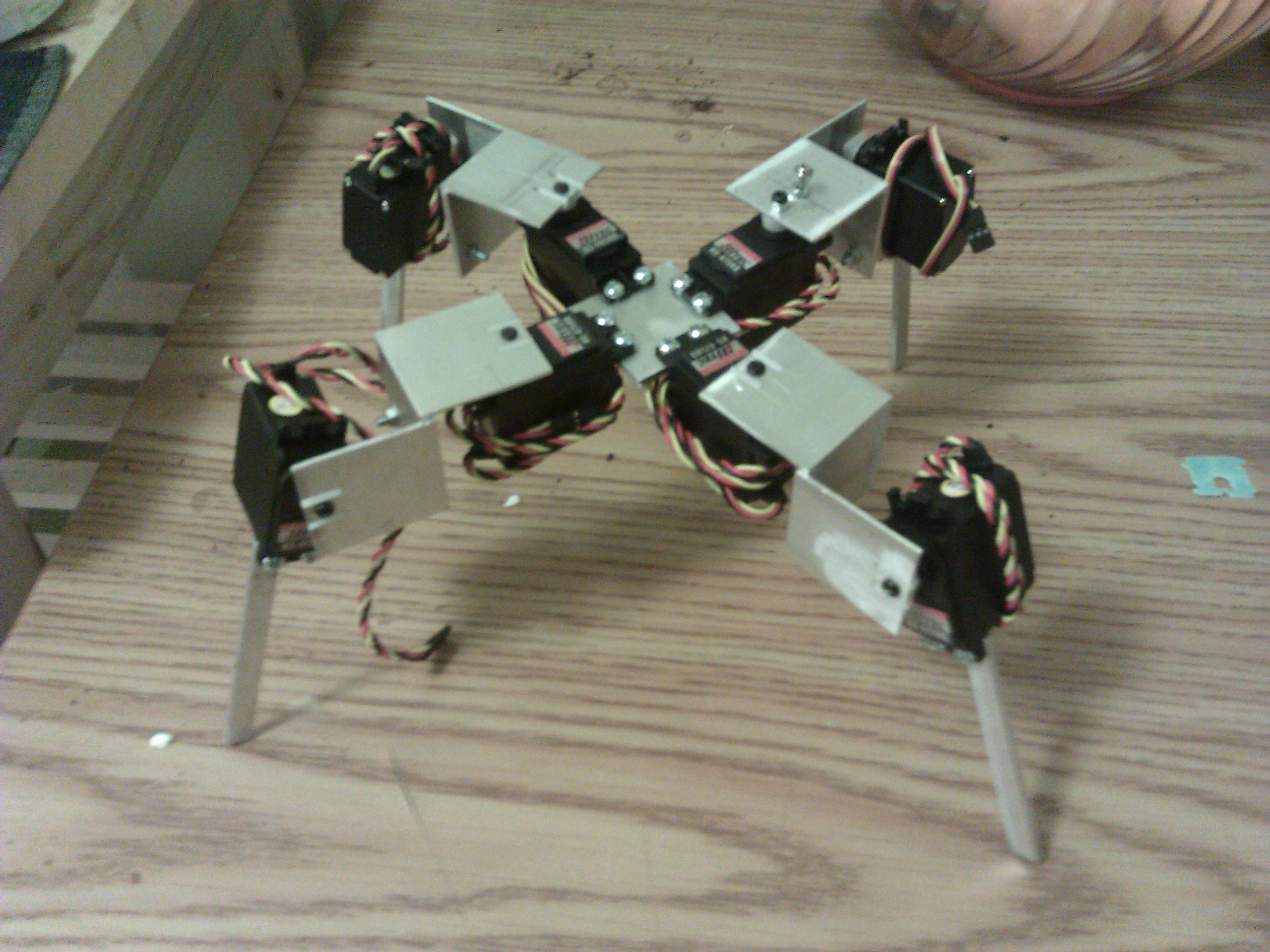
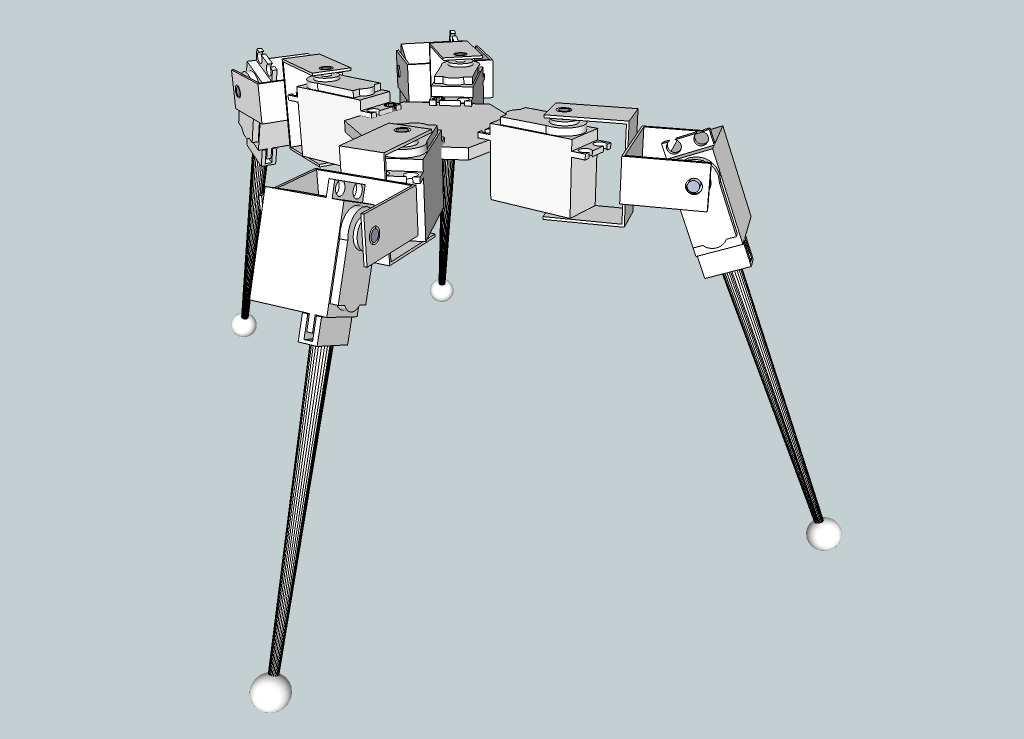
morganThis project has been a several years work in progress. I'd moved to Sydney, Australia in early 2013 and didn't take it along. Now that I am back in San Francisco I'm going to start hacking on it again.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Dan DWRobotics
Dan DWRobotics

 Ranarchy
Ranarchy
 The Big One
The Big One
Hi
Nice to meet you after viewing your profile i am Jacinda, from (jakarta) indonesia,
i have a project discussion with you please email me on: (jacinda.seiler@yahoo.com)