0%
0%
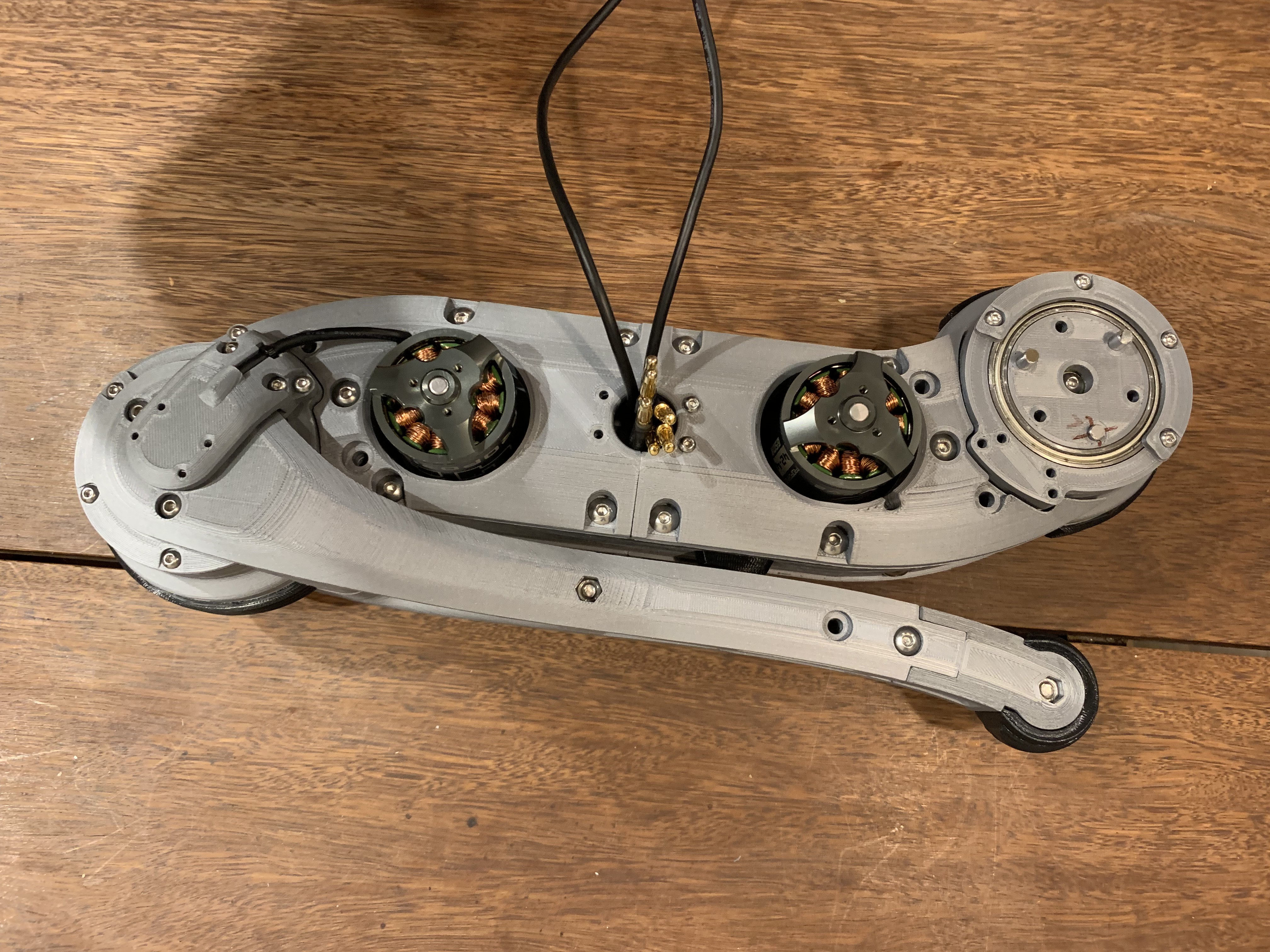
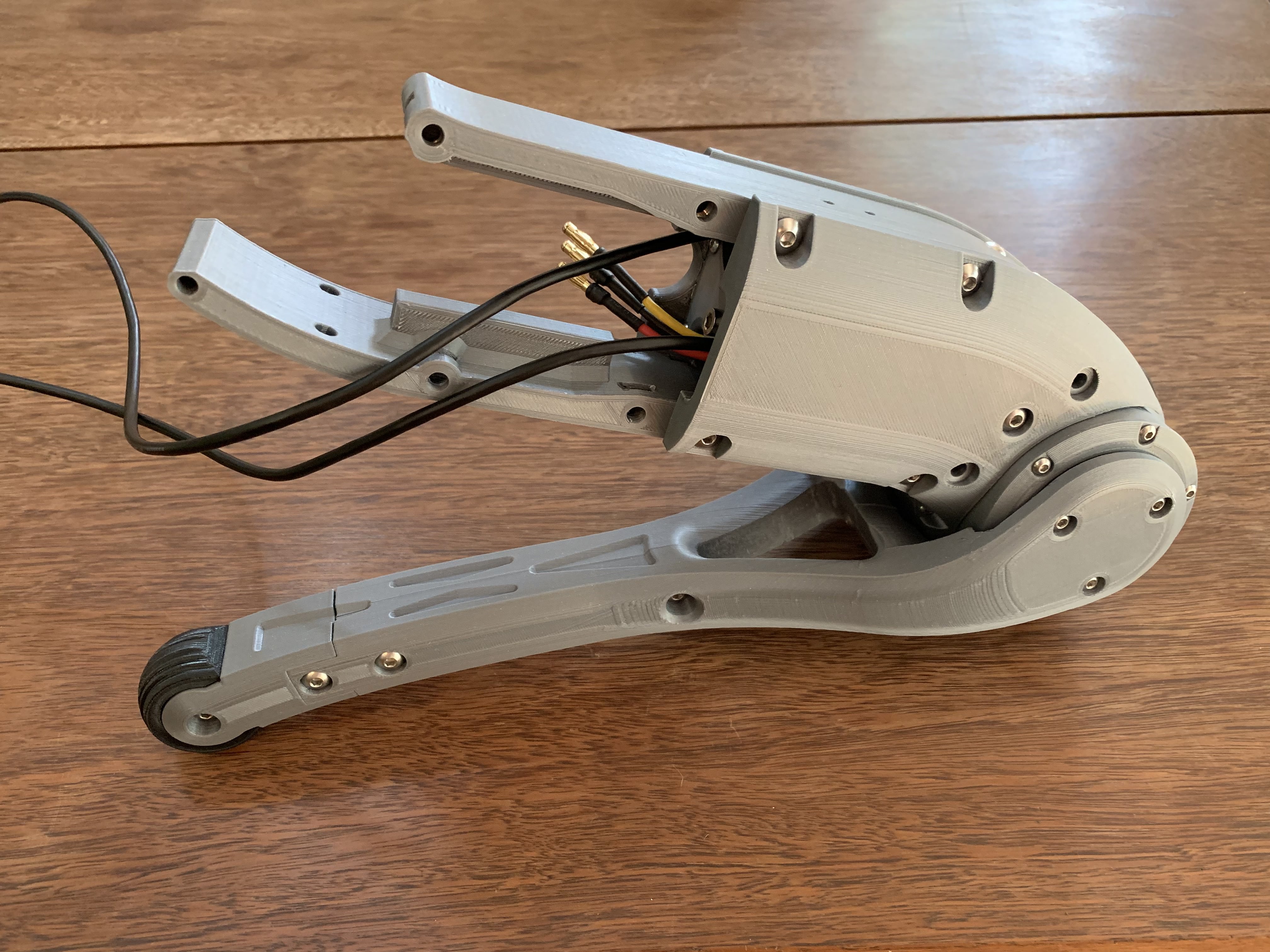
3D Printed Quadruped Leg
A 3D printed robotic leg, inspired by Boston Dynamic's Spot Mini robot. Aimed to balance form and function
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Johannes Hassler
Johannes Hassler
 Isaac S. Gentry
Isaac S. Gentry
 Nathan Peterson
Nathan Peterson
Amazing! Keep up the good work