 Gaultier Lecaillon
Gaultier LecaillonI used the python library OpenCV to process the image that is under the arm, to allow itself to find and pickup object.
Here is the demo:
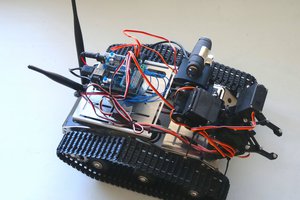
This is a simple 3 axis robotic arm with an embedded camera.
He is able to find and pick up object by itself without external control.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
I used the python library OpenCV to process the image that is under the arm, to allow itself to find and pickup object.
Here is the demo:


Hi can you please share details of this project, i'm also working similar type of project.
after surfing internet for so many days i came to know about this....
Hi can you please explain the networking part of it, how does the pc give coordinates that translate to the robot arm's movement?

Please i need the code for the project. Thank you
femidaps2001@gmail.com
Can you send me the code, please? mechatronics2019strm1@gmail.com

Can you please send me the source code of this project? syachrifaldi@gmail.com

Can you please send me the source code of this project? randysandy000@gmail.com

Is it possible to have more details? / Tutorials?
Wonderfull job
 Boian Mitov
Boian Mitov
 Dave Niewinski
Dave Niewinski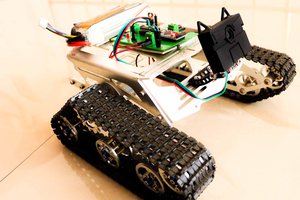
 Jithin Sanal
Jithin Sanal
 codersilver
codersilver
Hi, can you share the code at edhoybpn86@gmail.com, appreciate for your help