 Lingkang Zhang
Lingkang ZhangActuators
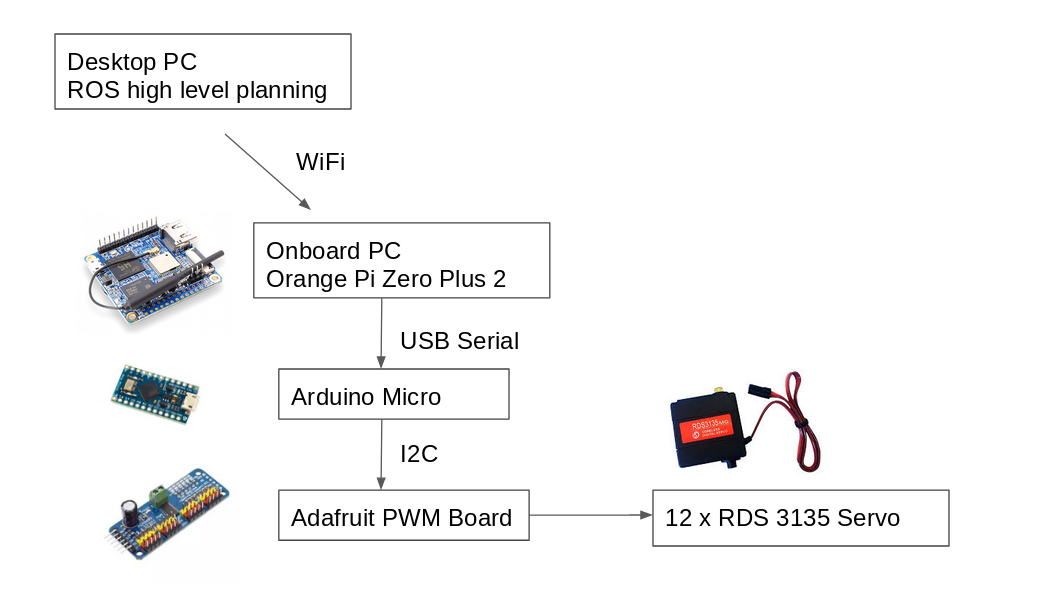
Tsuki was designed using Fusion 360. He has 12 degrees of freedom. 12 RDS3135 servo motors are used as actuators. The motor driver system is exactly the same as Quadruped Kaze.
The total body length is 30cm, the thigh is 15cm and the shank is 15cm.


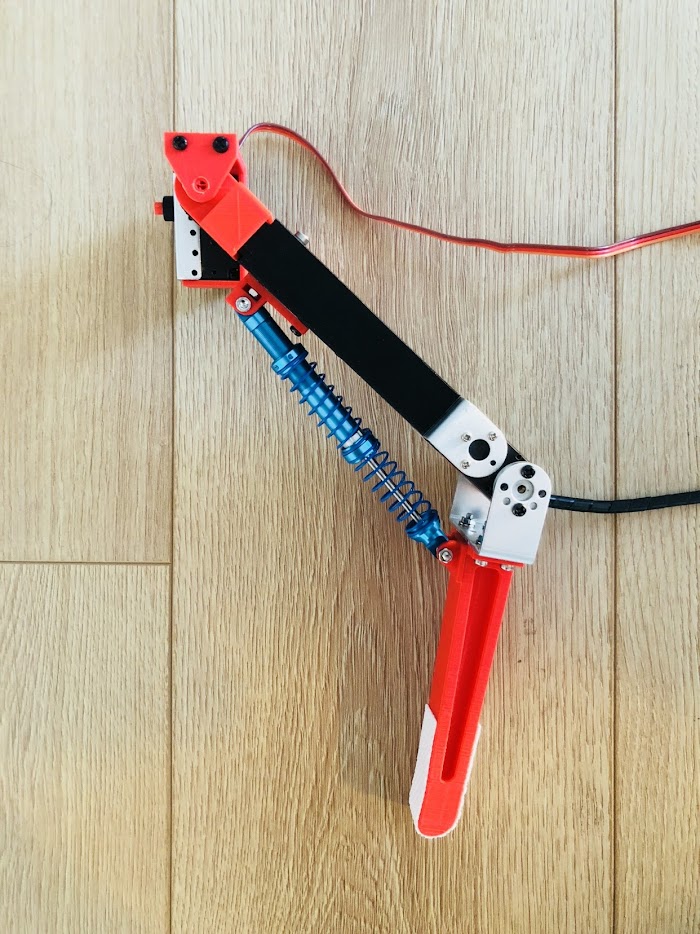
Leg
Dampers are added to each legs to reduce the torque required.

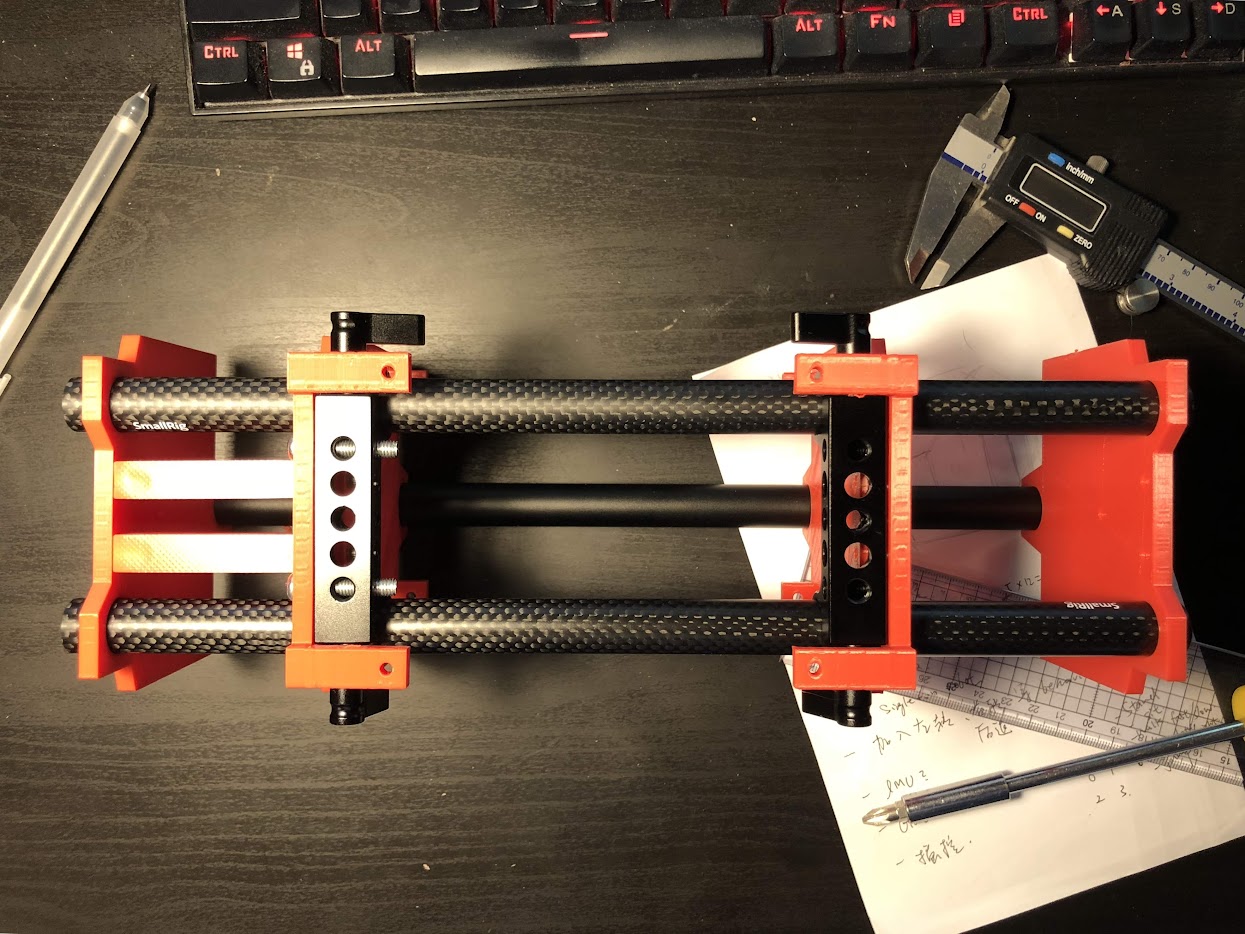
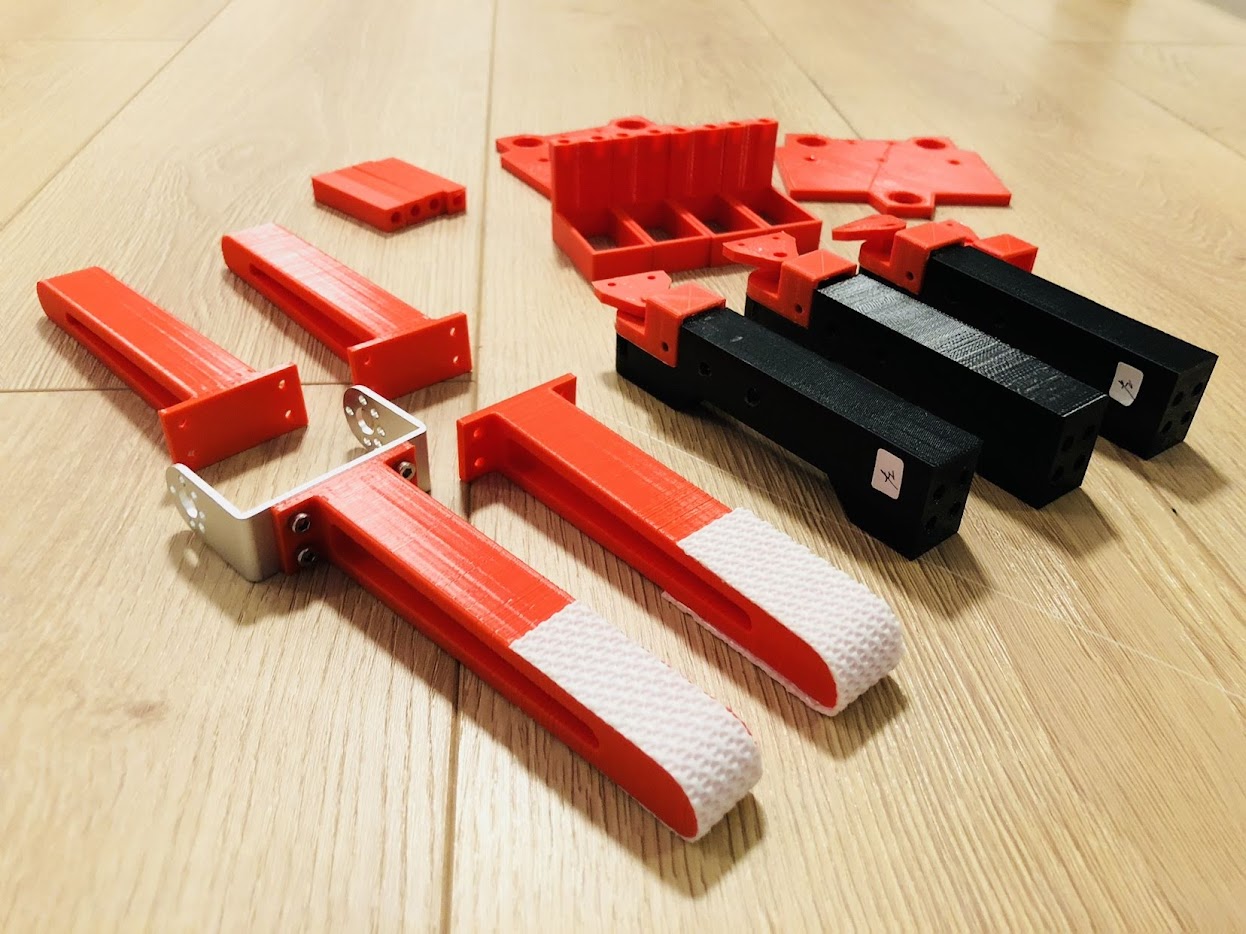
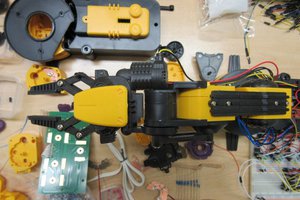
Mechanical Parts
3 carbon fiber tubes are used in the torso. A number of improvements in the 3D printed parts are made and it has way less backlashes compared to Kaze.


Software
No IMUs or foot contacting sensors are used at the moment. All the control are simply “position control”, not force control involved. The basic idea is to imagine the four legs are four robotic arms and take turns to lift up or move forward. ROS is being used for the high level control.
Videos
1) Inverse Kinematics Test
2) ROS Gazebo Simulation
3) Joystick Remote Control
4) Trotting 1
5) Trotting 2
6) Fast Move (~1m/s)
7) Acrobat
8) Rviz Demo
Conclusion
I was a bit supprised how good the performance I can achieve with pure position control and no external feedback sensor in the loop (IMU, contacting sensors etc.).
The downside is that the motors can be easily worn out since the whole thing is heavy (2kg) and I have to fix little 3D fragile parts all the time. Also, I need to tune a bunch of parameters to get it work properly for different speed and different floor.
More details comming soon…



 Kenji Larsen
Kenji Larsen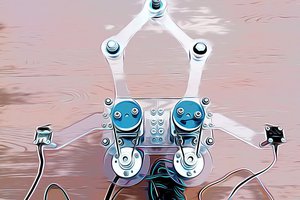
 Xavi Cano
Xavi Cano
 Michael Laffin
Michael Laffin
Wow, the kinesmatics are really coming along. Your recent gait test videos show the motion is getting to be quite smooth!