 kelvinA
kelvinANavigation
Prior Reading
- [R] Frameless VS Slotless BLDC
- [B][M][R] Custom 16mm Slotless?
- [R] 1656 18W BLDC and controller considerations
- [T] More accurate power estimates
Contents
The title tag system is explained here, and the table is updated when a change occurs. Notable logs have bold L# text.
Preface
[2024 - May 1]
Welcome to the 3rd level of "project in a project", or the 4th depending on how you look at it:
- #Tetinventory [gd0039]
- #Teti [gd0022] [The Main Project]
- #Tetent [gd0090]
- #Tetrinsic [gd0041]
- Tetoroidiv [We Are Here]
- #Tetrinsic [gd0041]
- #Tetent [gd0090]
- #Teti [gd0022] [The Main Project]
This project is the merge of a 16mm BLDC motor and "Tetrinsic PCB", currently now responsible for driving said motor as well as the following needed for #Tetrinsic [gd0041].:
- controlling an addressable LED strip
- reading the orientation of the BLDC rotor
- reading a force sensitive resistor
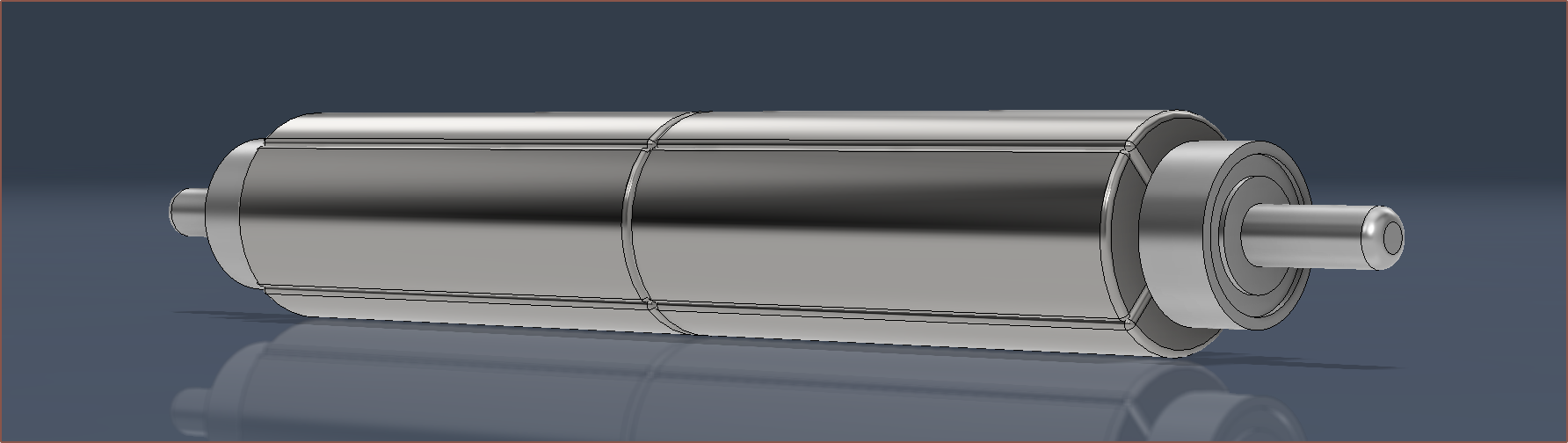
The name is the merge of "toroid" and "derivative", with the former being because of the ferrite toroids (aka ferrite core or ferrite ring) that are used in place of traditional laminations for a slotless motor, and the latter because it's like a "3rd order differential" (if you consider Tetinventory as an integration) of the Teti project.

I'd rather not DIY a motor here, but the name is likely to stick even if I am able to acquire a commercially available motor, as the goal is to combine a 16mm BLDC with the custom PCB.
At the time of writing (and still the case 2 weeks after), 16mm motors (brushed and brushless) between lengths 36 and 59mm are only available directly from manufacturers (e.g. on Alibaba), and the prices are high (>£30/ea) considering I'd need 8 for a pair of Tetent's and 10 for a pair of Tetrescent's.
 So I had the idea to actually create a simple PowerPoint animation where the orange bar would slide up and down 50mm with a smooth start/end transition to account for acceleration. Then, the time duration of both the animation and the transition to the next slide would be changed so that it looks like my finger is actually moving the slider. I found that a 0.12s animation and 0.14s slide transition achieved this without my finger doing any particular effort.
So I had the idea to actually create a simple PowerPoint animation where the orange bar would slide up and down 50mm with a smooth start/end transition to account for acceleration. Then, the time duration of both the animation and the transition to the next slide would be changed so that it looks like my finger is actually moving the slider. I found that a 0.12s animation and 0.14s slide transition achieved this without my finger doing any particular effort.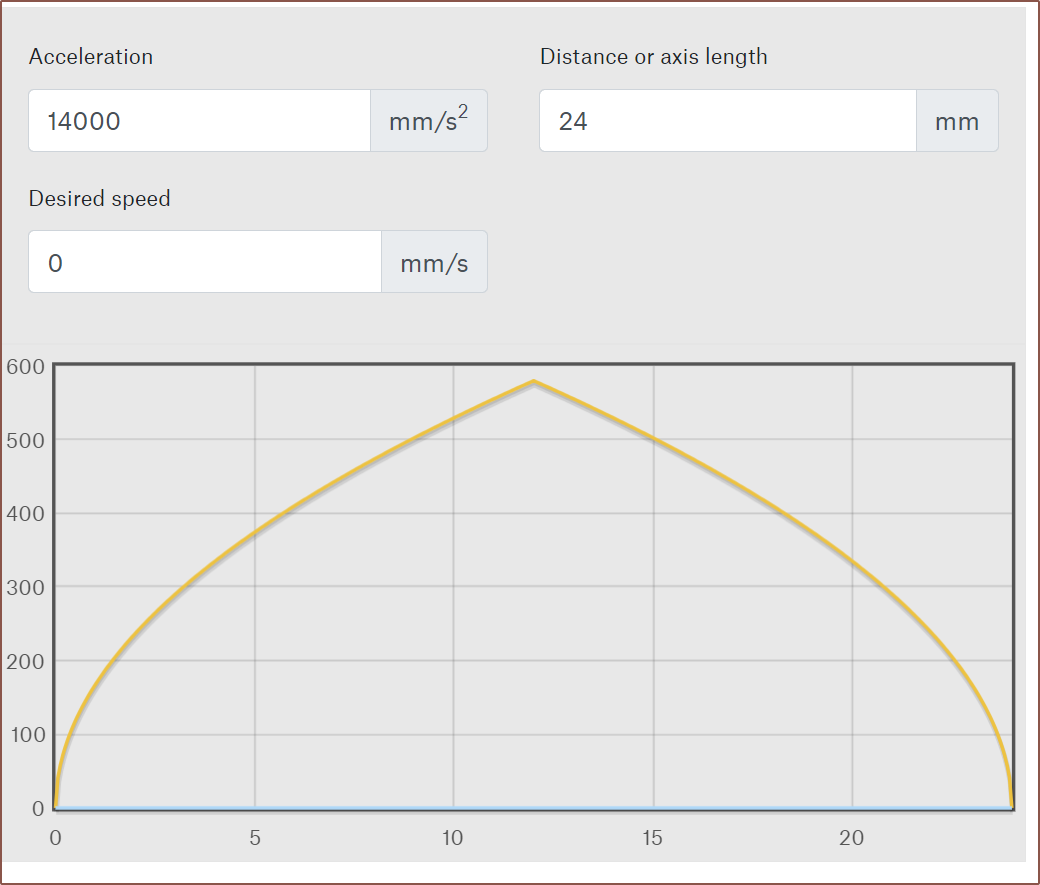

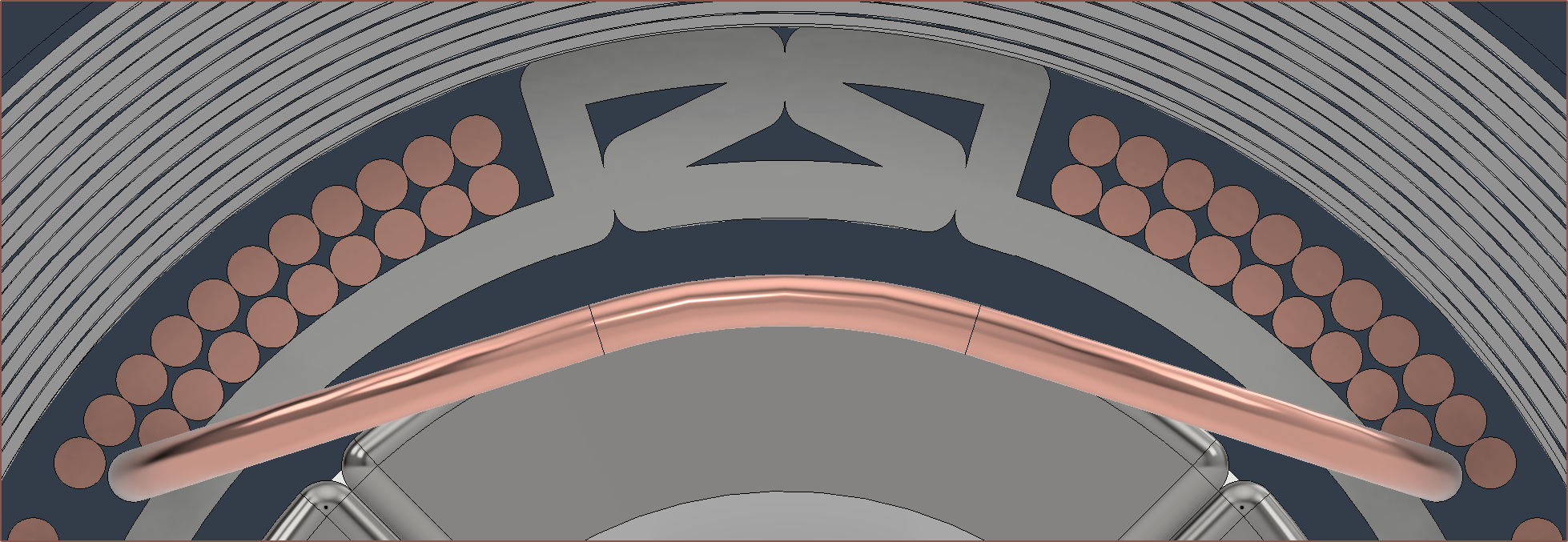

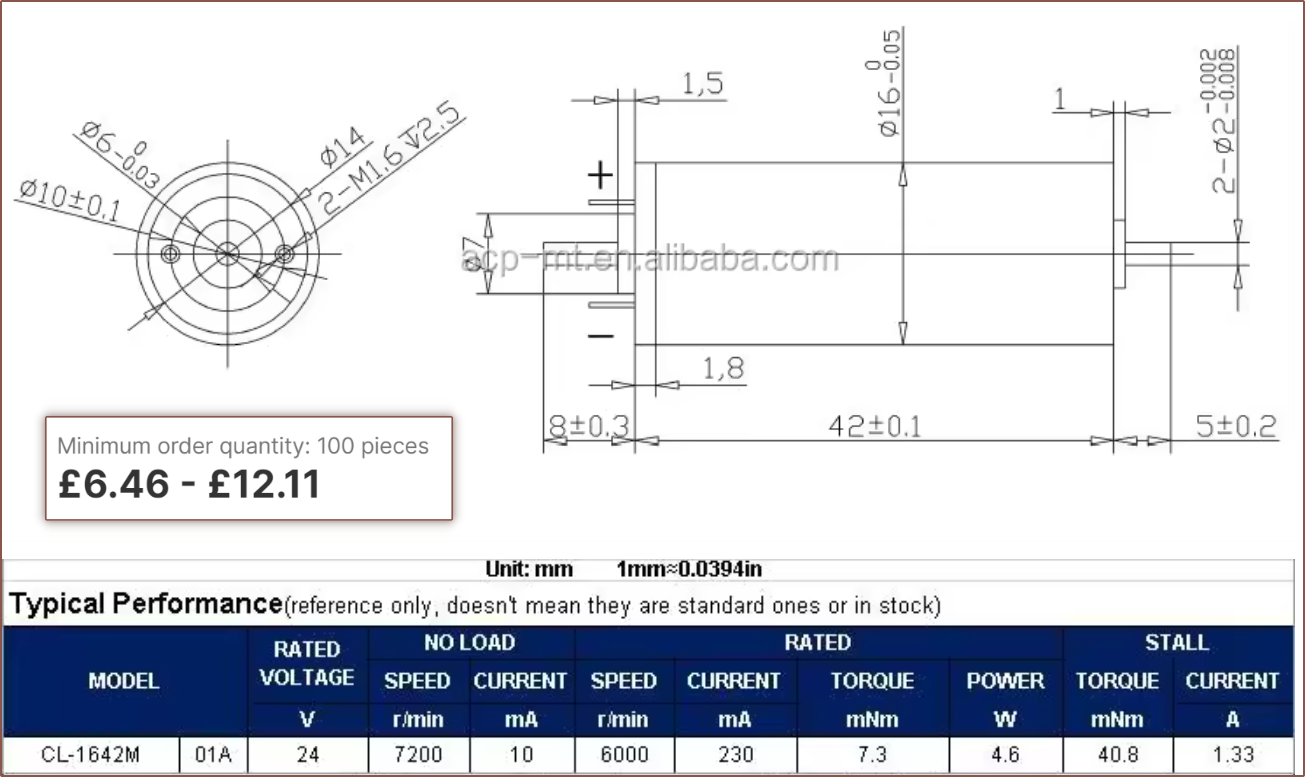
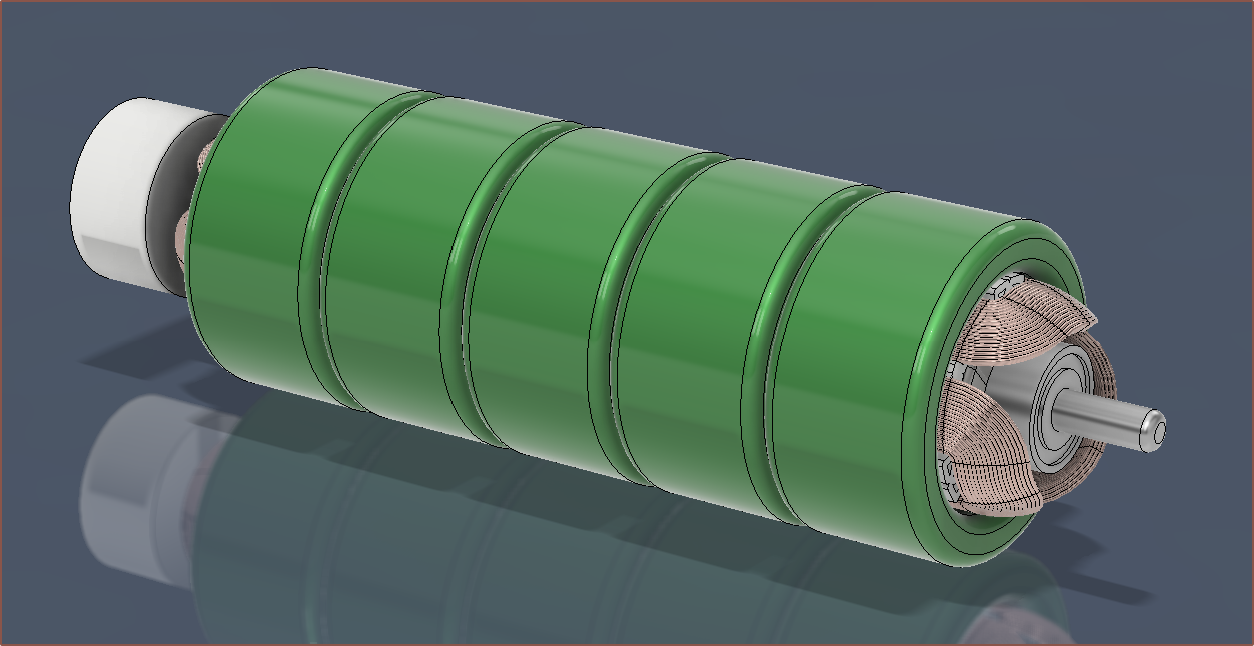
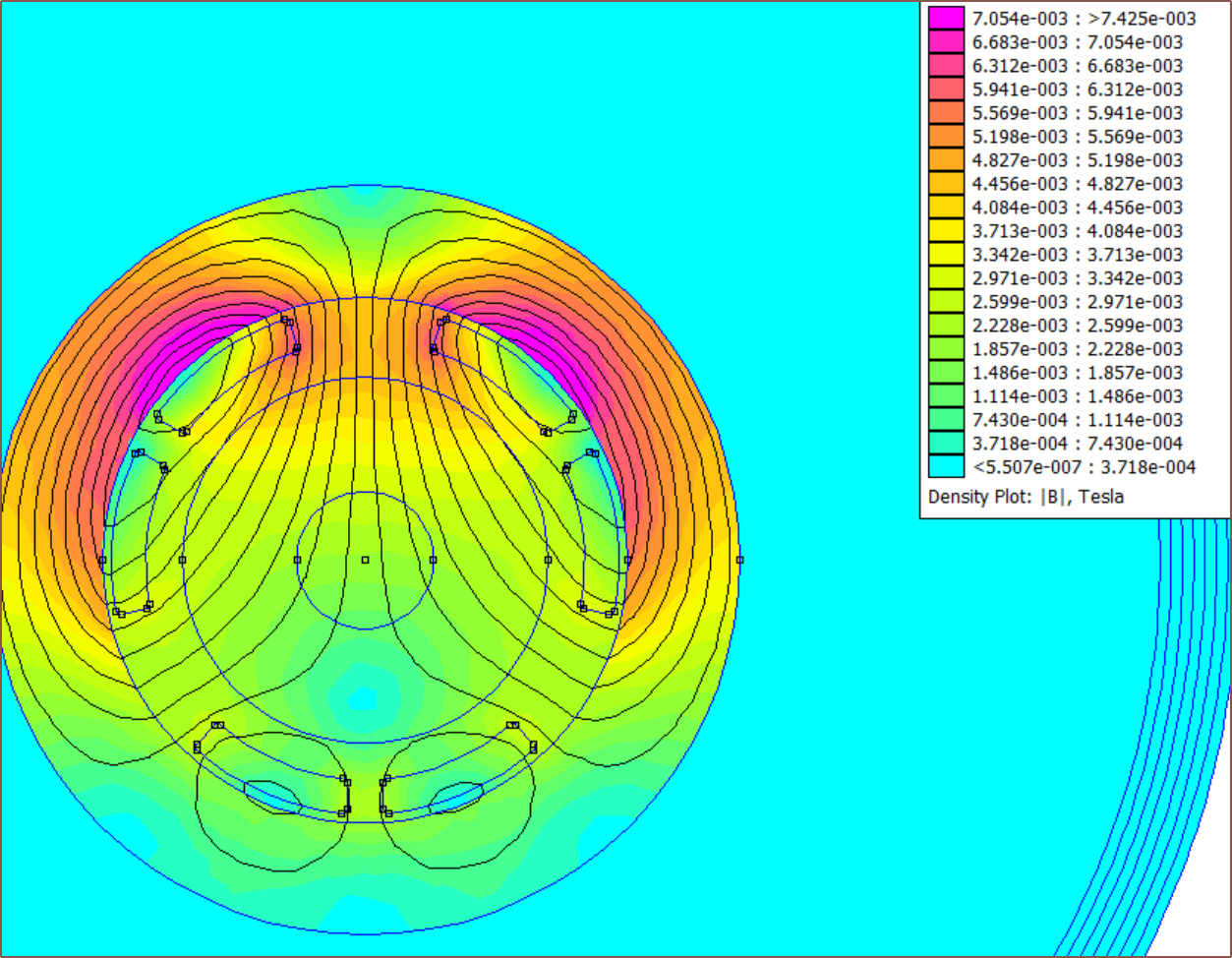
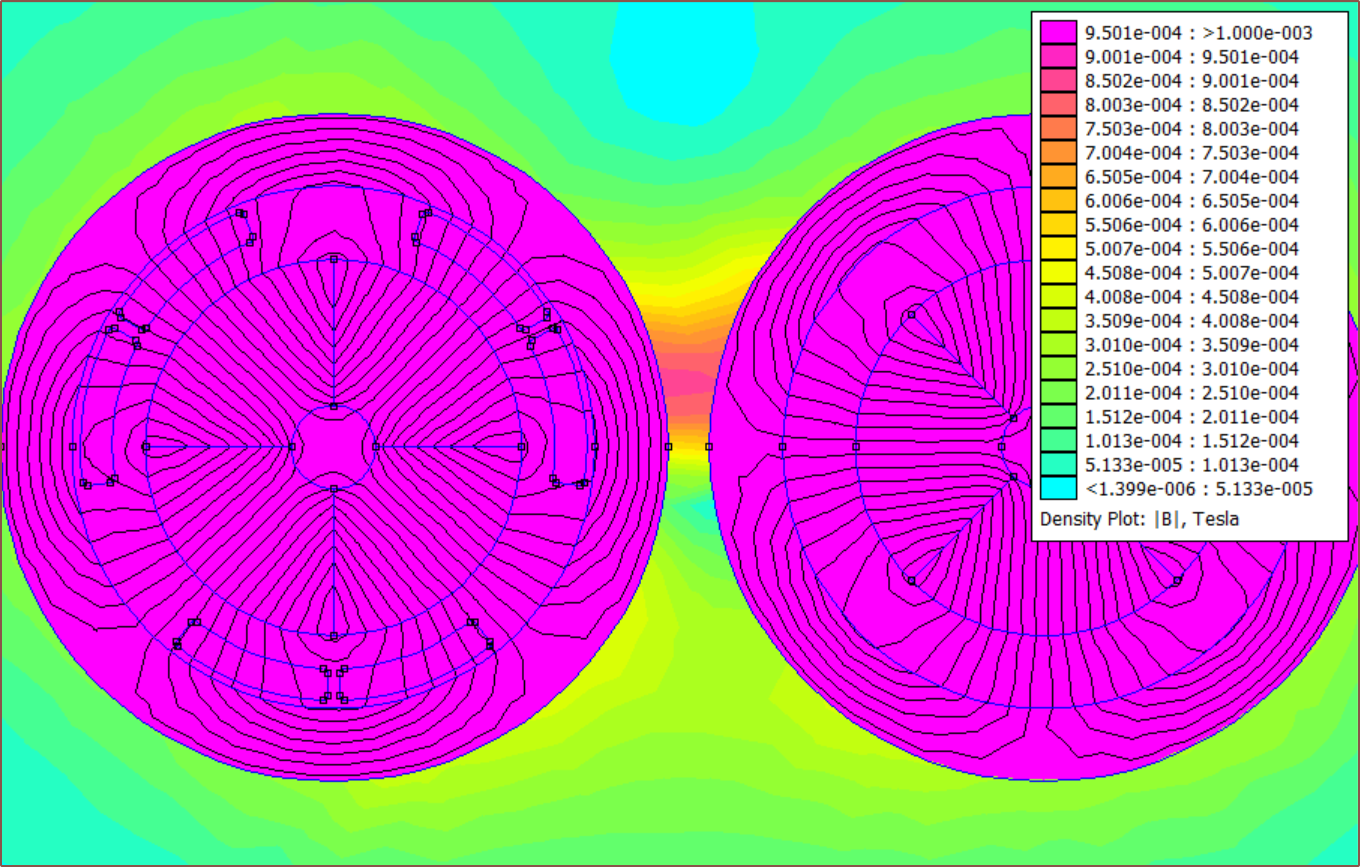 I have more confidence that my simulation is set up correctly if there actually is a standard size that's only 0.1mm smaller on the ID.
I have more confidence that my simulation is set up correctly if there actually is a standard size that's only 0.1mm smaller on the ID.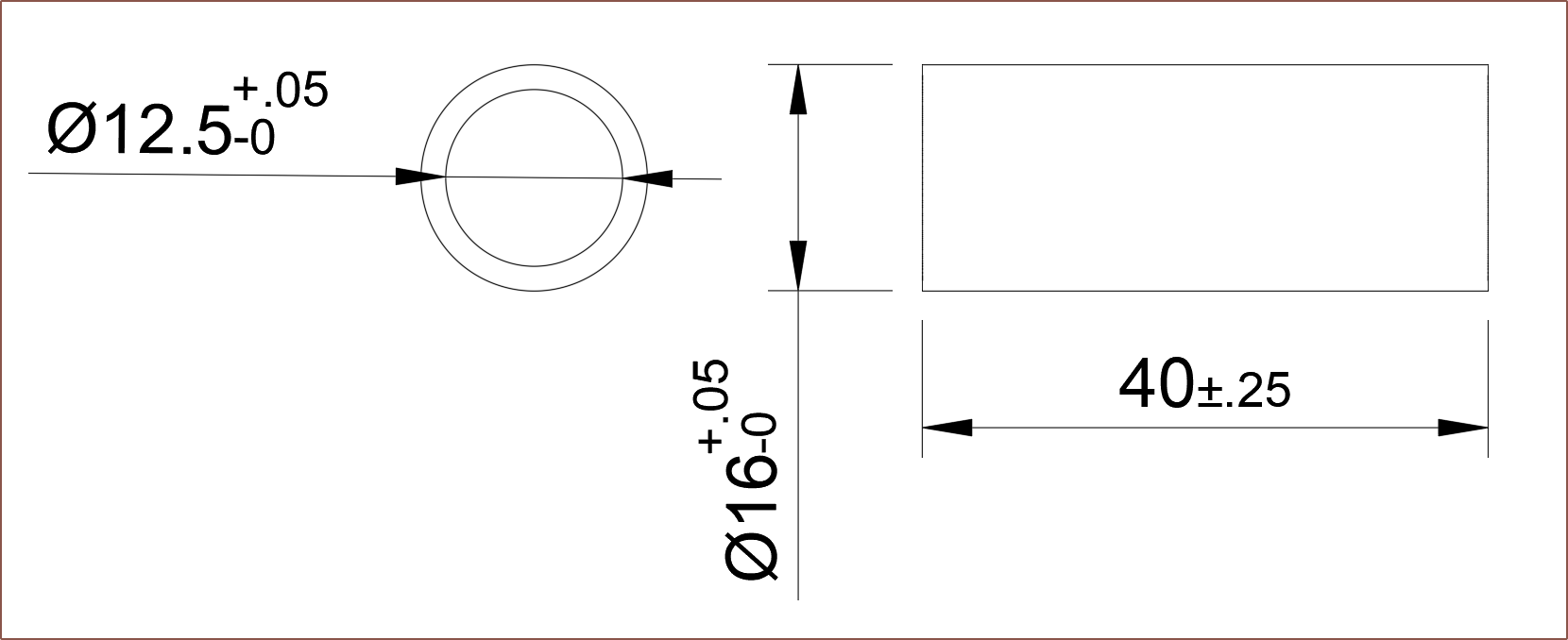 The stator is shorter because the expected PCBA thickness is expected to be 4.95mm. Additionally, I added an extra 4mm to the belt length of Tetrinsic that I've now removed. All in all, this means that the rotor has to decrease from 42mm to 36-37mm.
The stator is shorter because the expected PCBA thickness is expected to be 4.95mm. Additionally, I added an extra 4mm to the belt length of Tetrinsic that I've now removed. All in all, this means that the rotor has to decrease from 42mm to 36-37mm. 
 Each SS-430 yoke could potentially cost only £1.50, as the coil length is 0.707m and 14 lengths could be cut from a 10m roll.
Each SS-430 yoke could potentially cost only £1.50, as the coil length is 0.707m and 14 lengths could be cut from a 10m roll.





 Jonathan Beri
Jonathan Beri
 Sci
Sci
 Daren Schwenke
Daren Schwenke