 Ronald Jaramillo
Ronald Jaramillo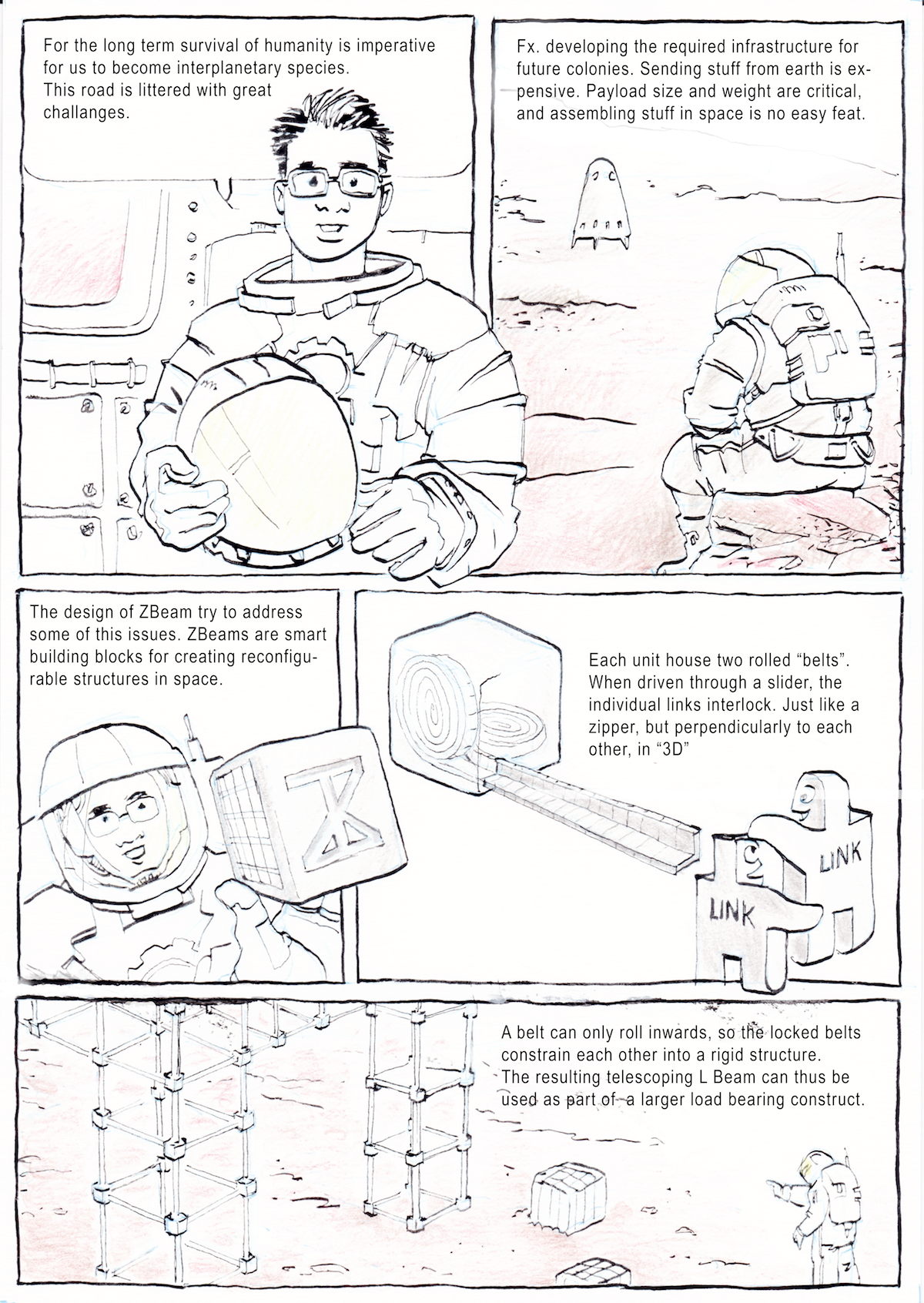
Goals
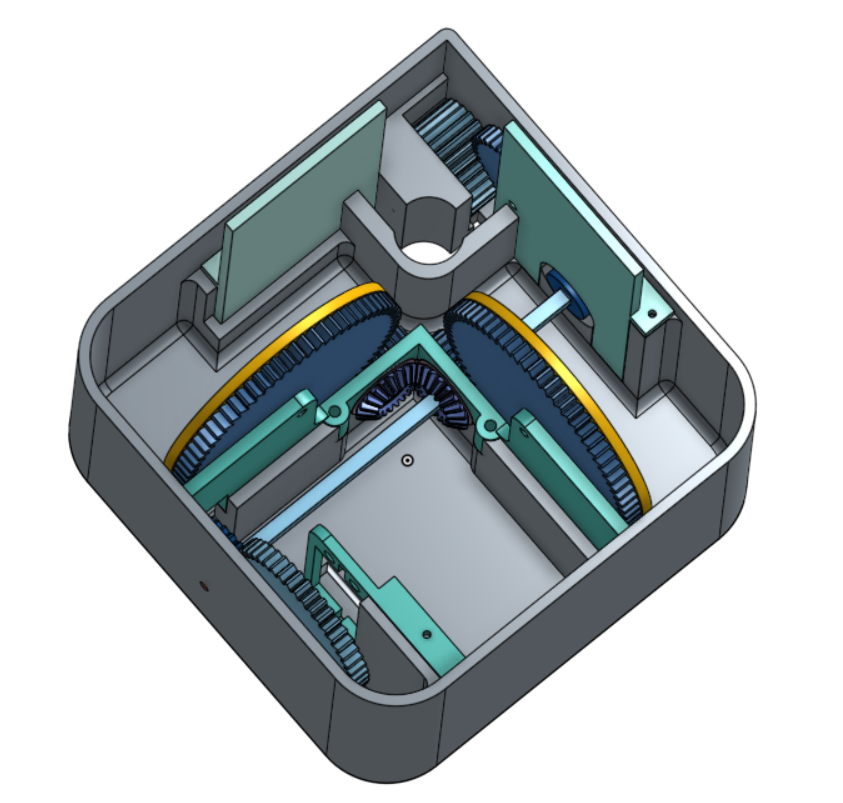
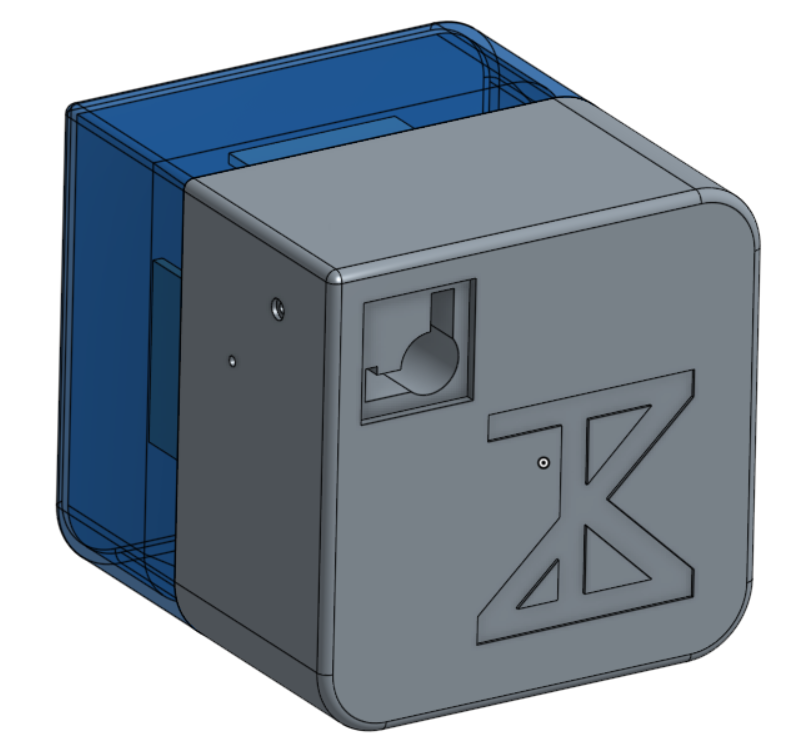
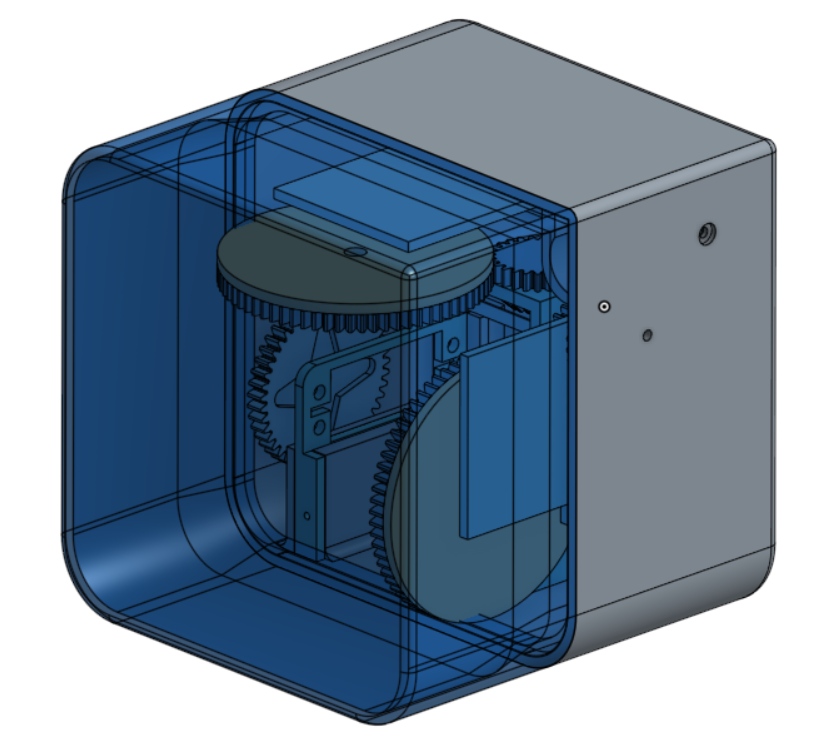
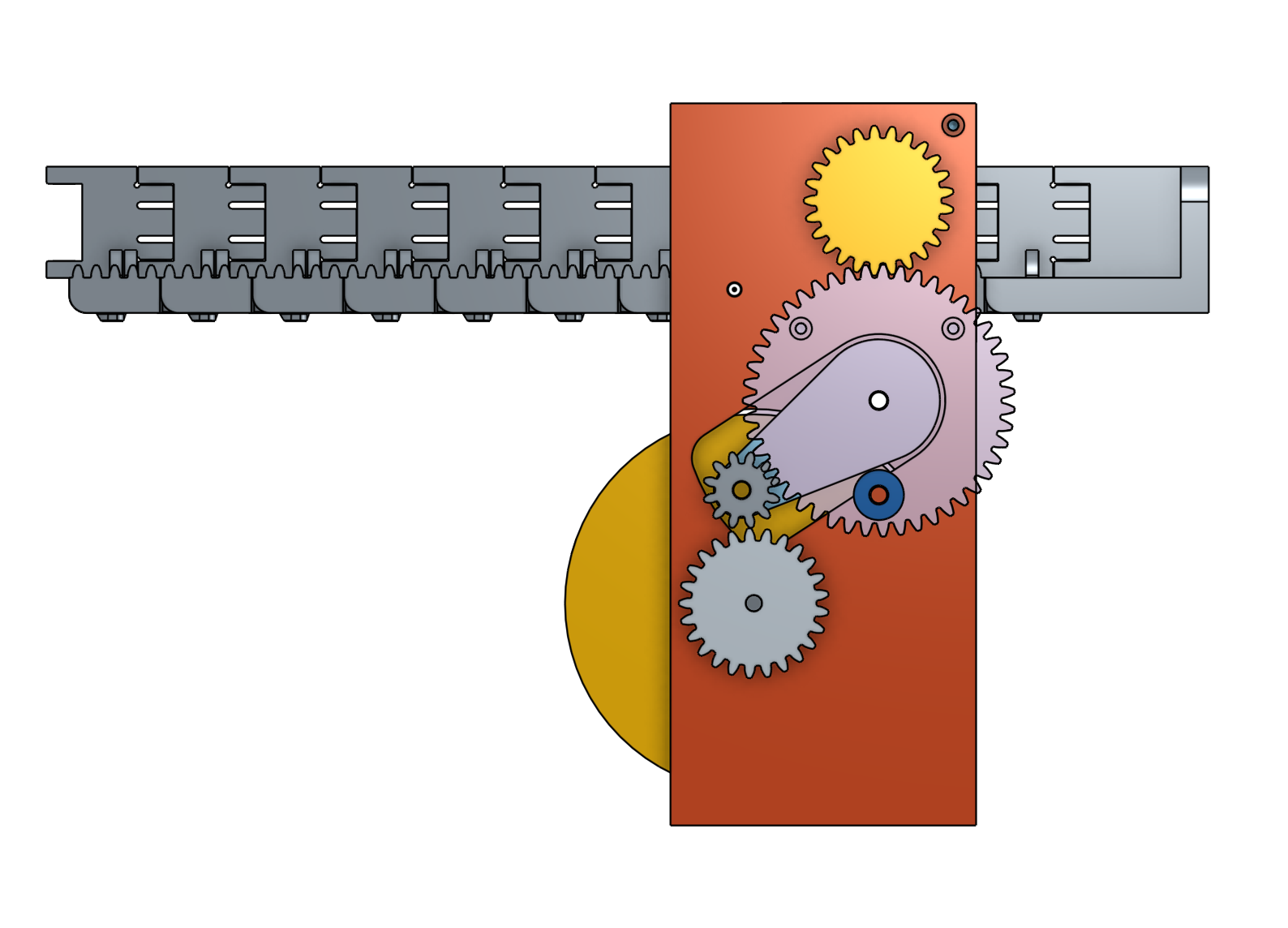
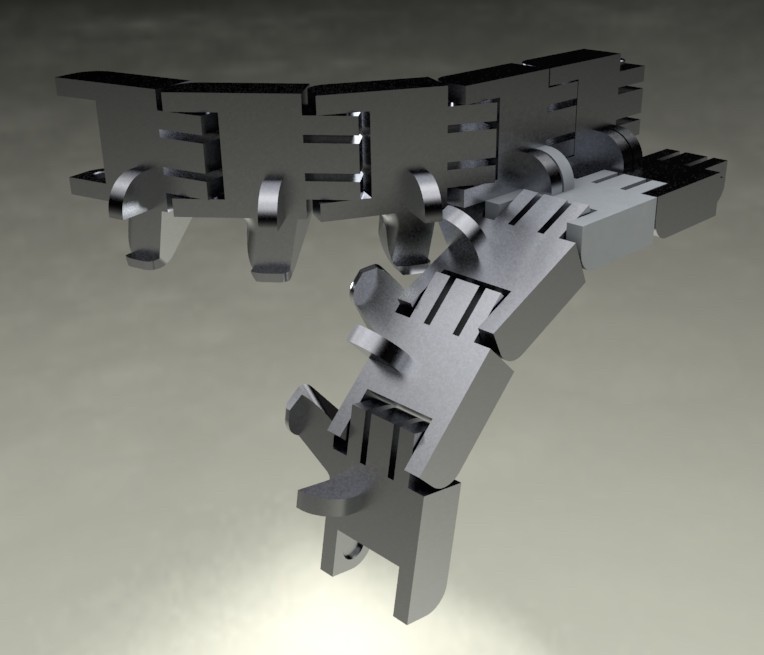
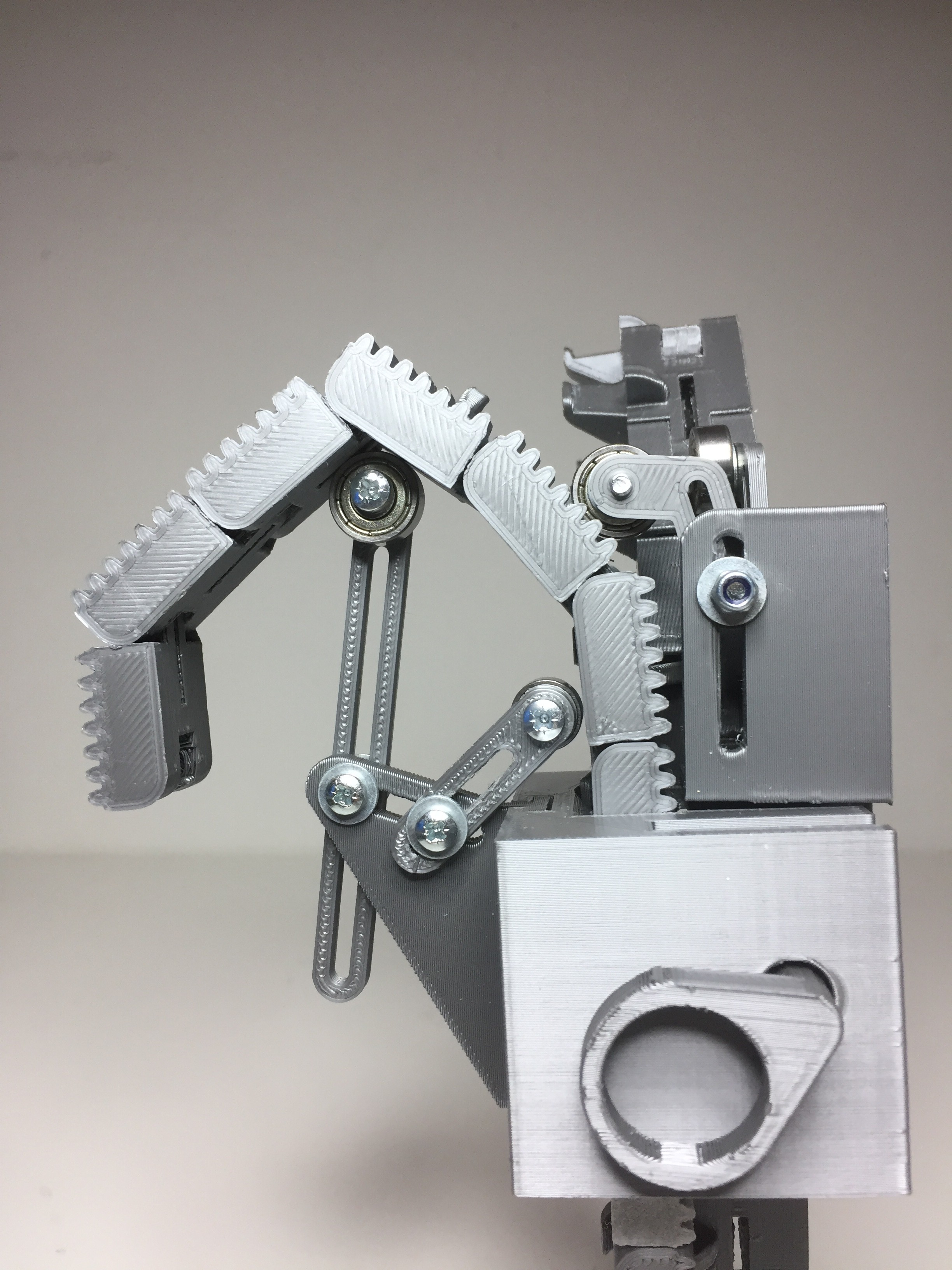
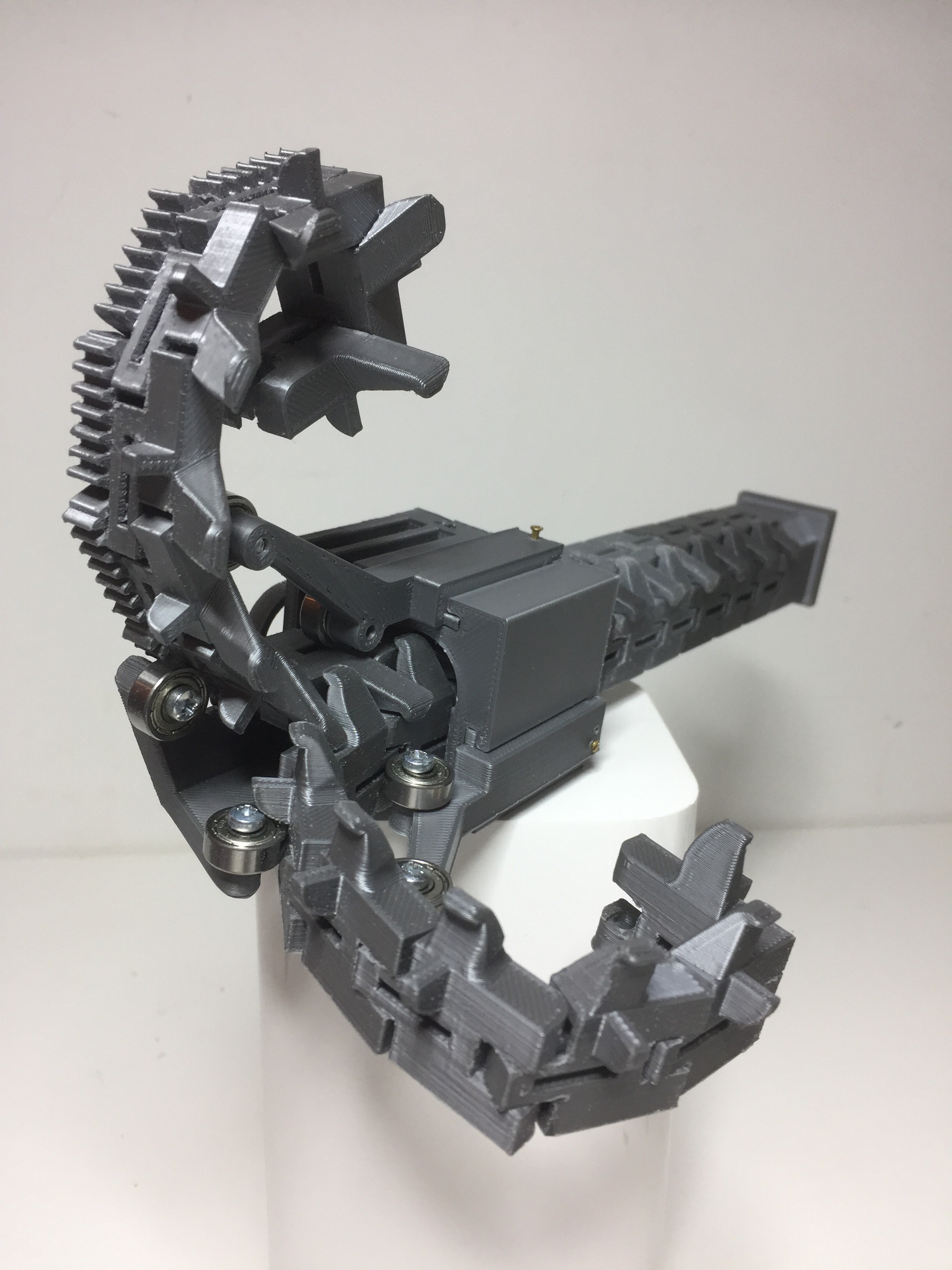
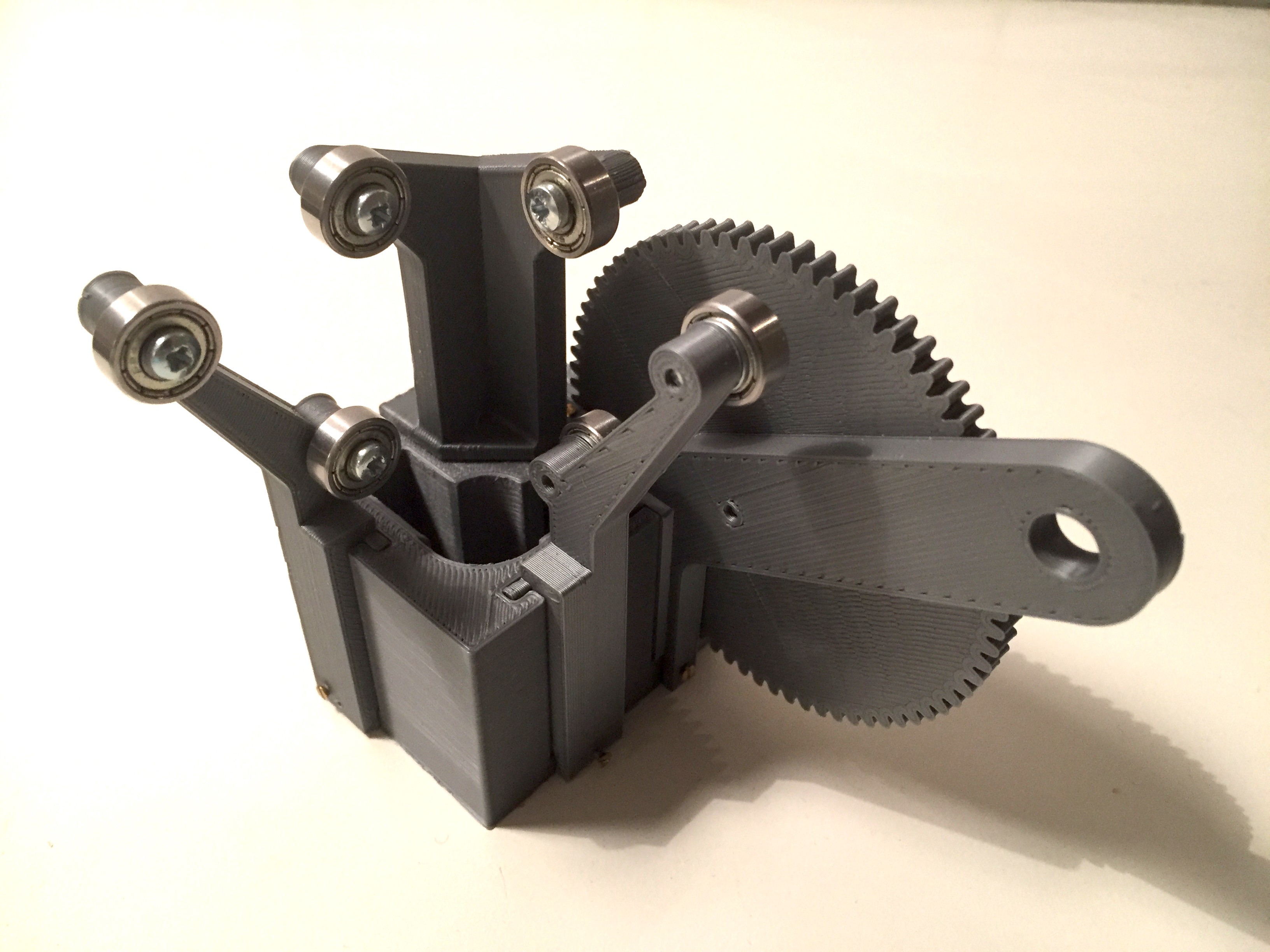
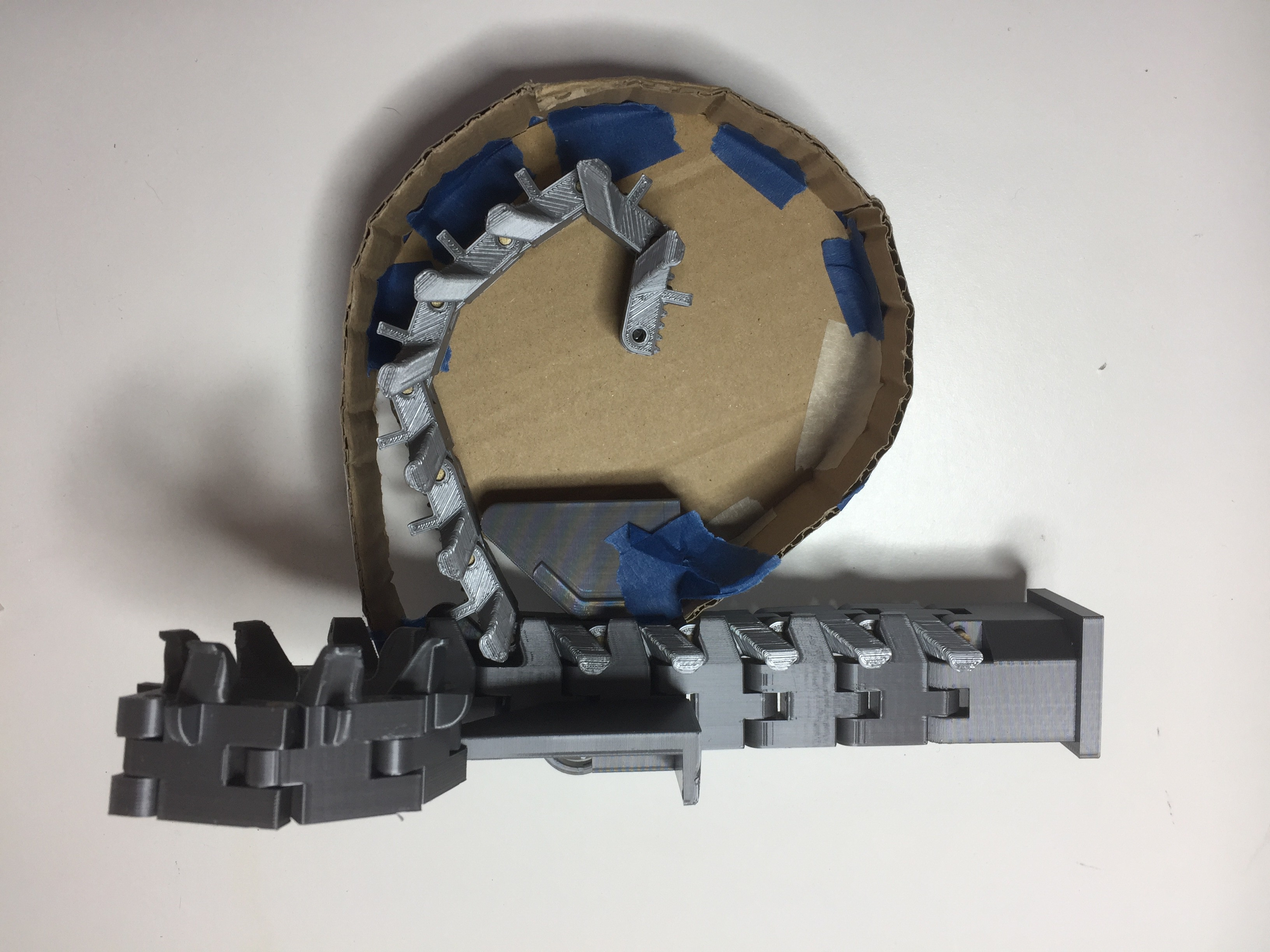
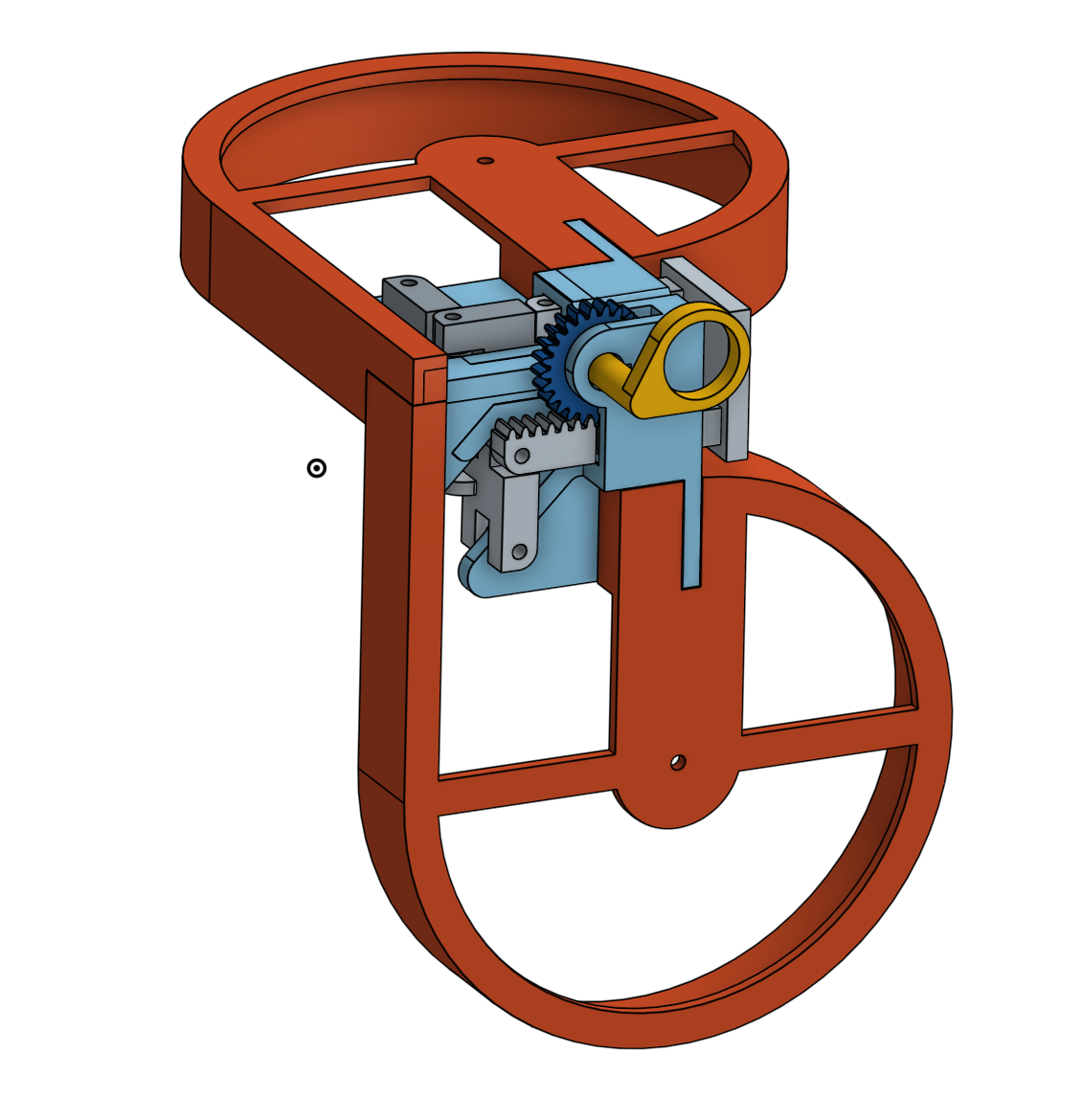
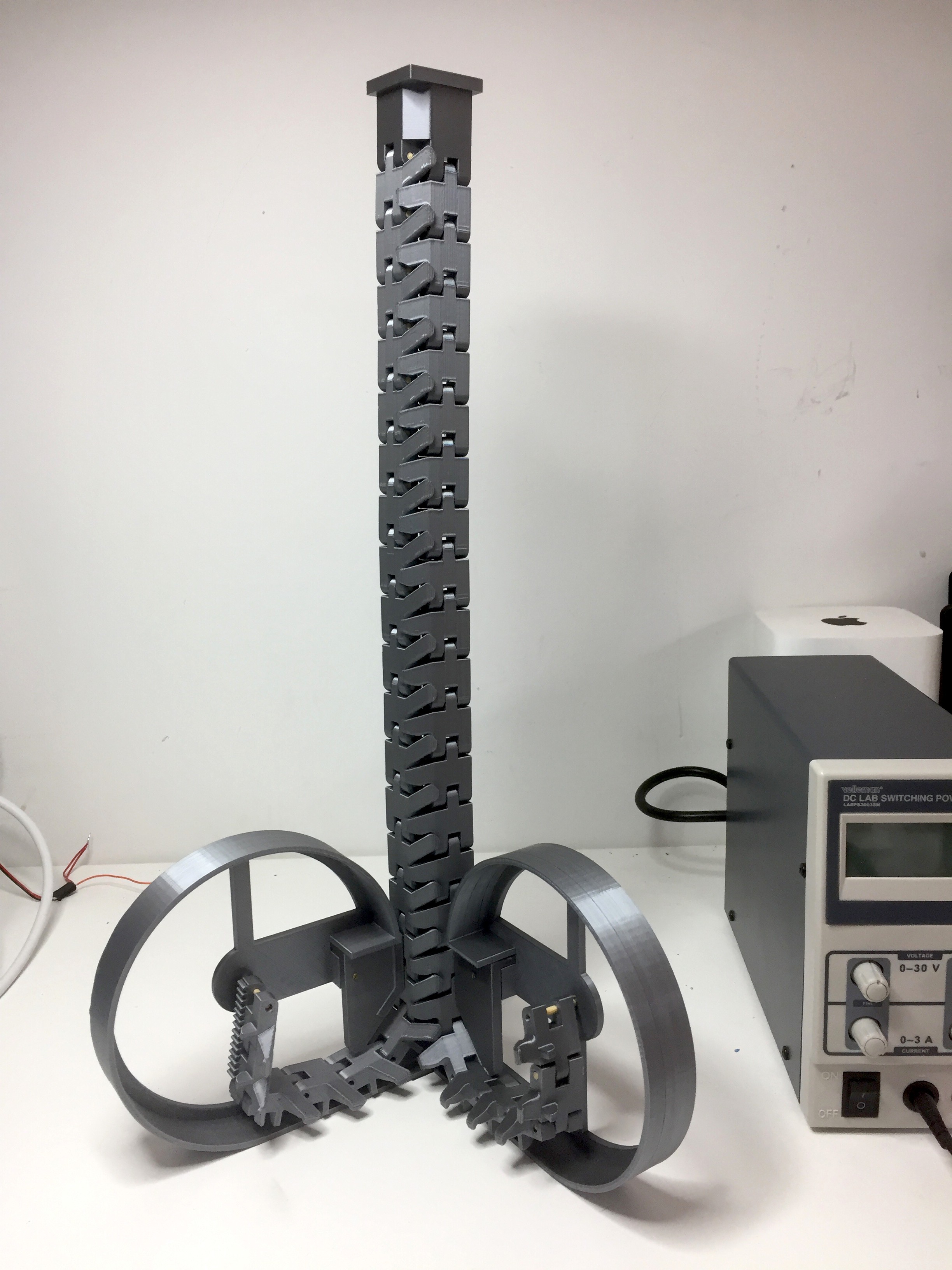
The intention behind this project is to explore the possibilities inherent in modular shape shifting structures. The unit for this system is a cubical component containing reels of 3D printable inter-lockable links. Each unit can control the extension of the telescoping beam.
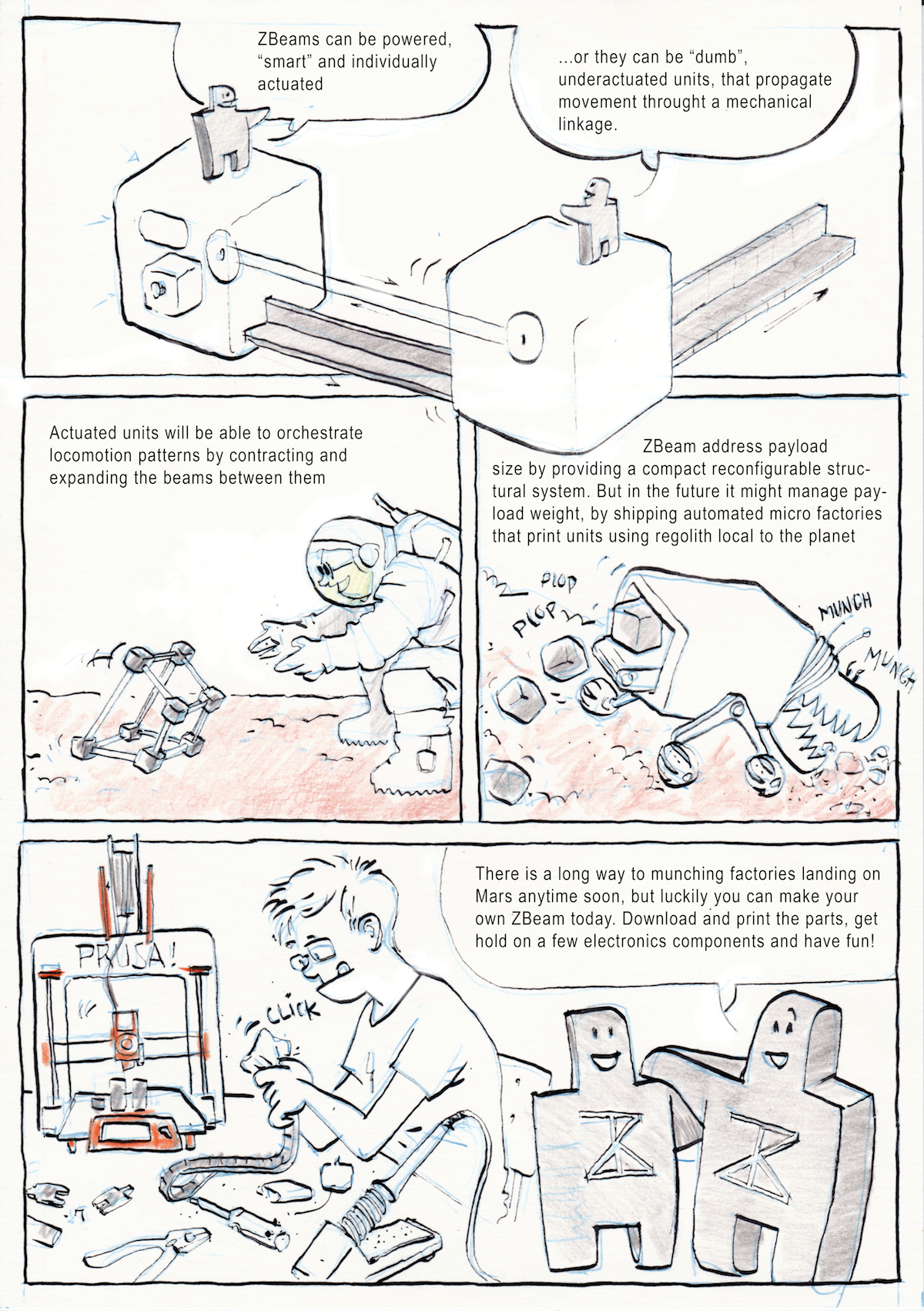
Units can be active or passive actuated. Passive actuated units can be activated when mechanically connected to an active unit. Units can have one or two beams at 90 or 180 degrees to each other.
Scope and deliverables
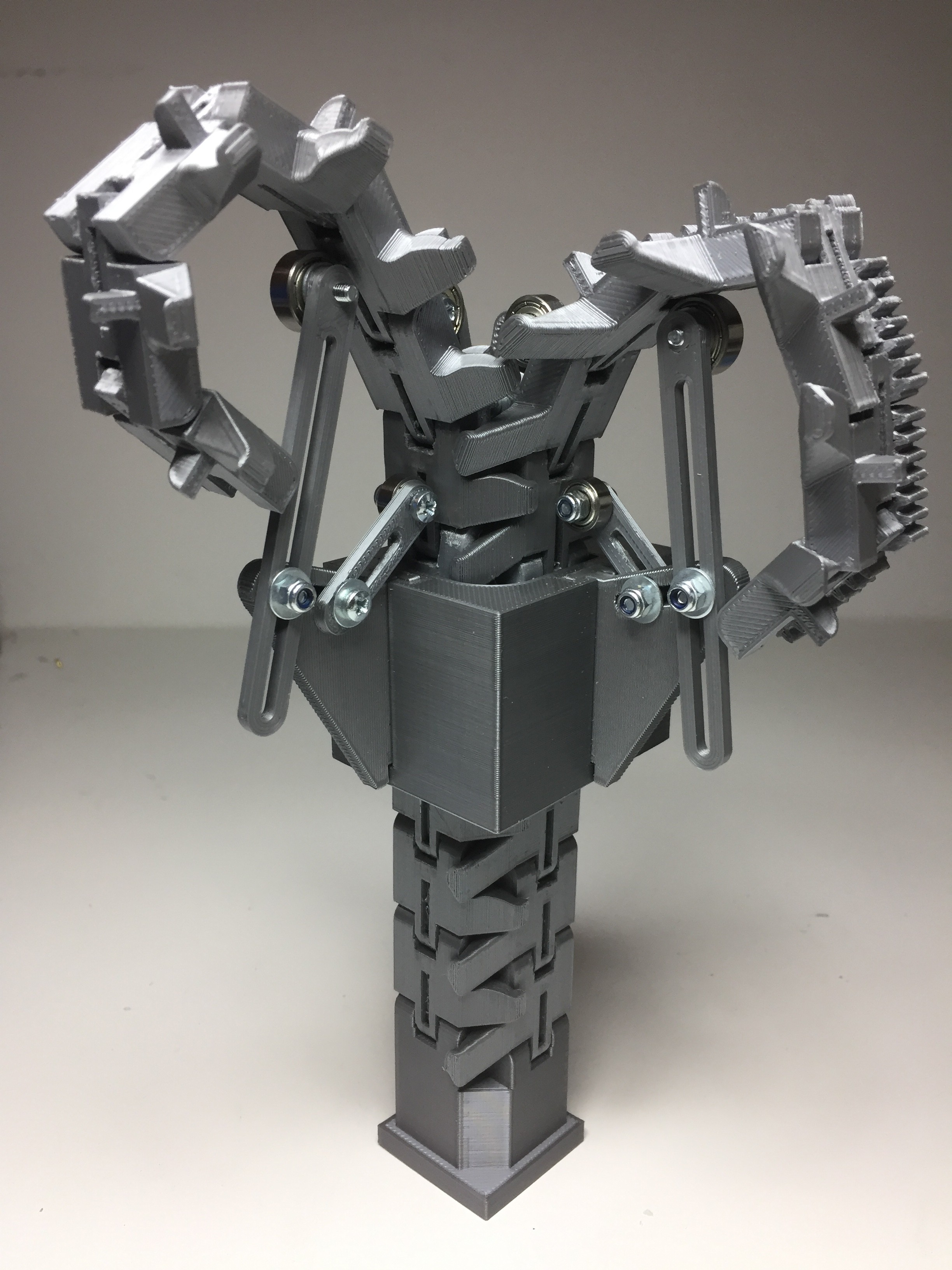
The project will developing a working prototype for an actuated single ZBeam unit and an idea catalog detailing applications for a collection of units.
The prototype deliverables will include:
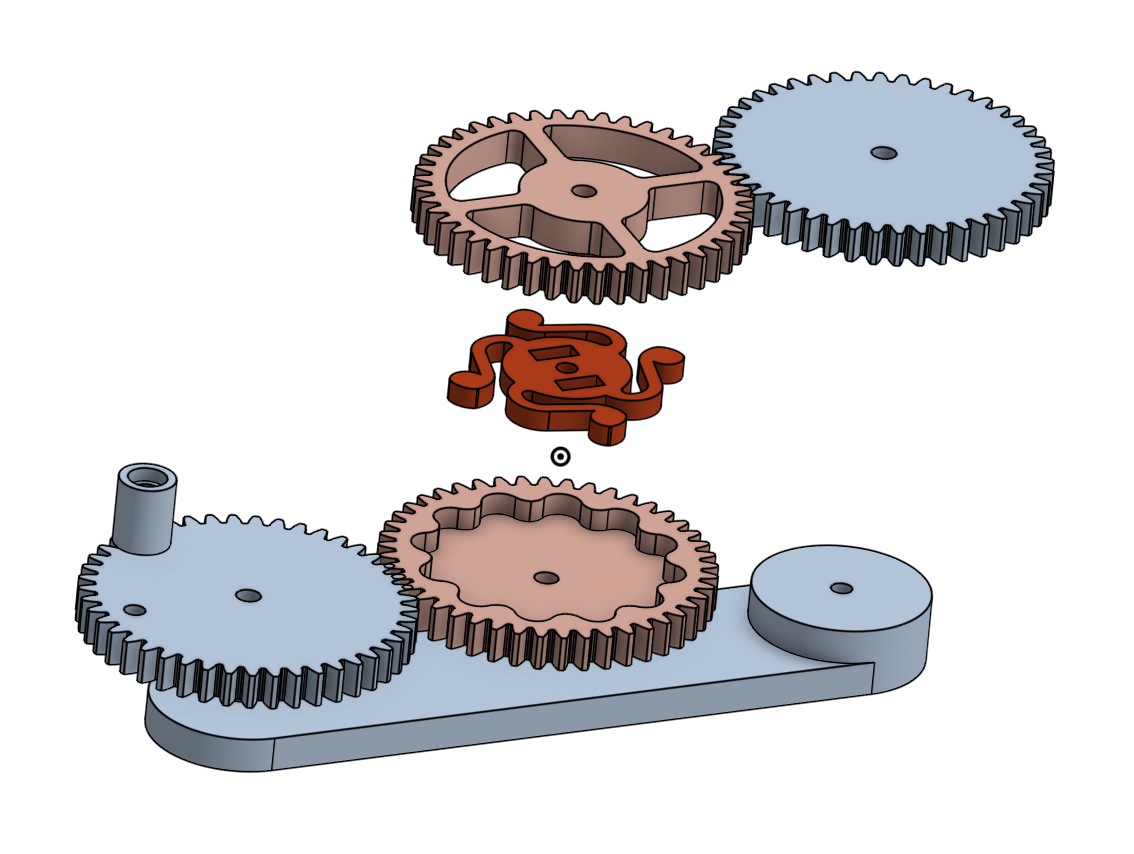
- CAD files of the unit detailing the design
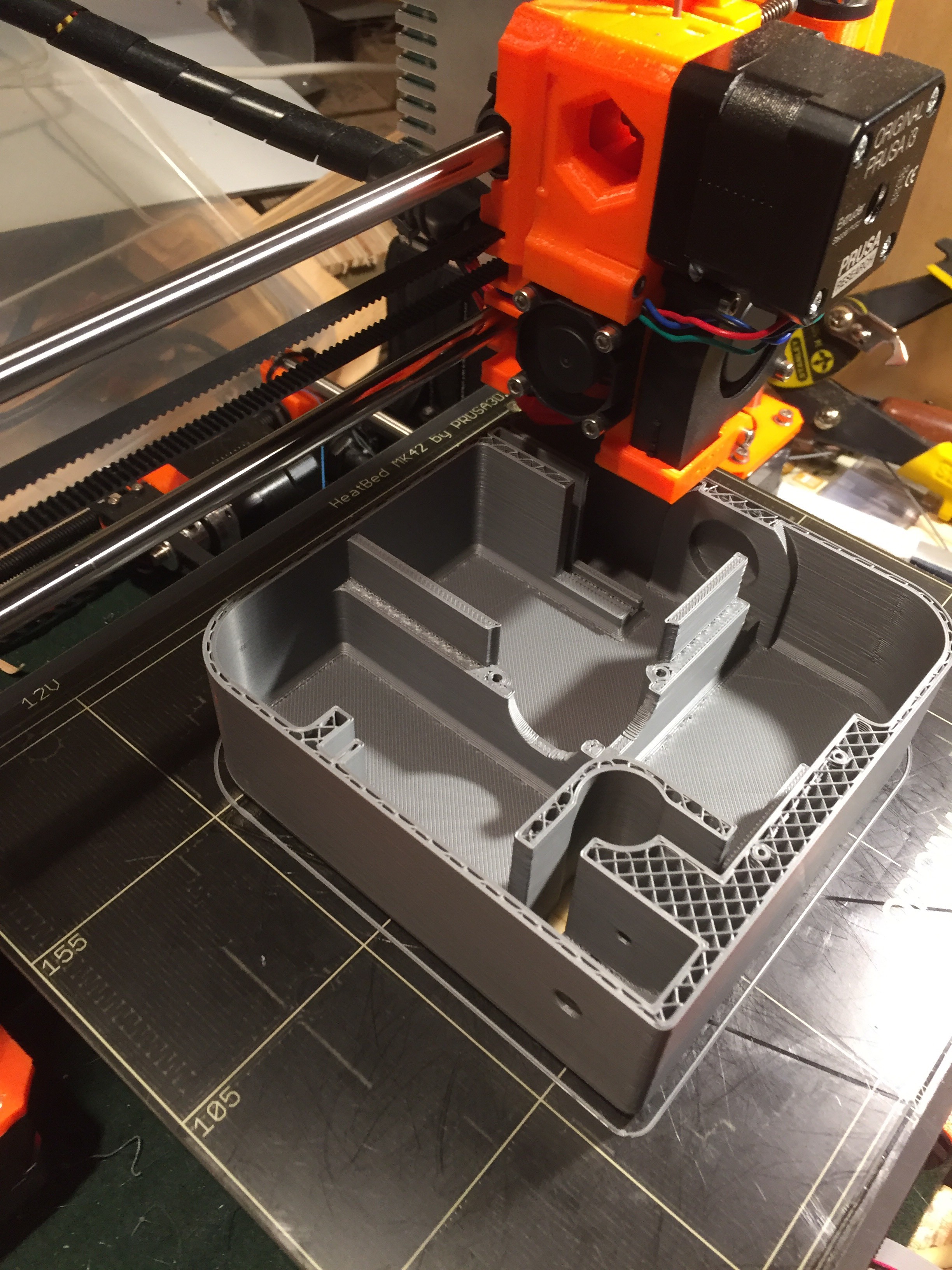
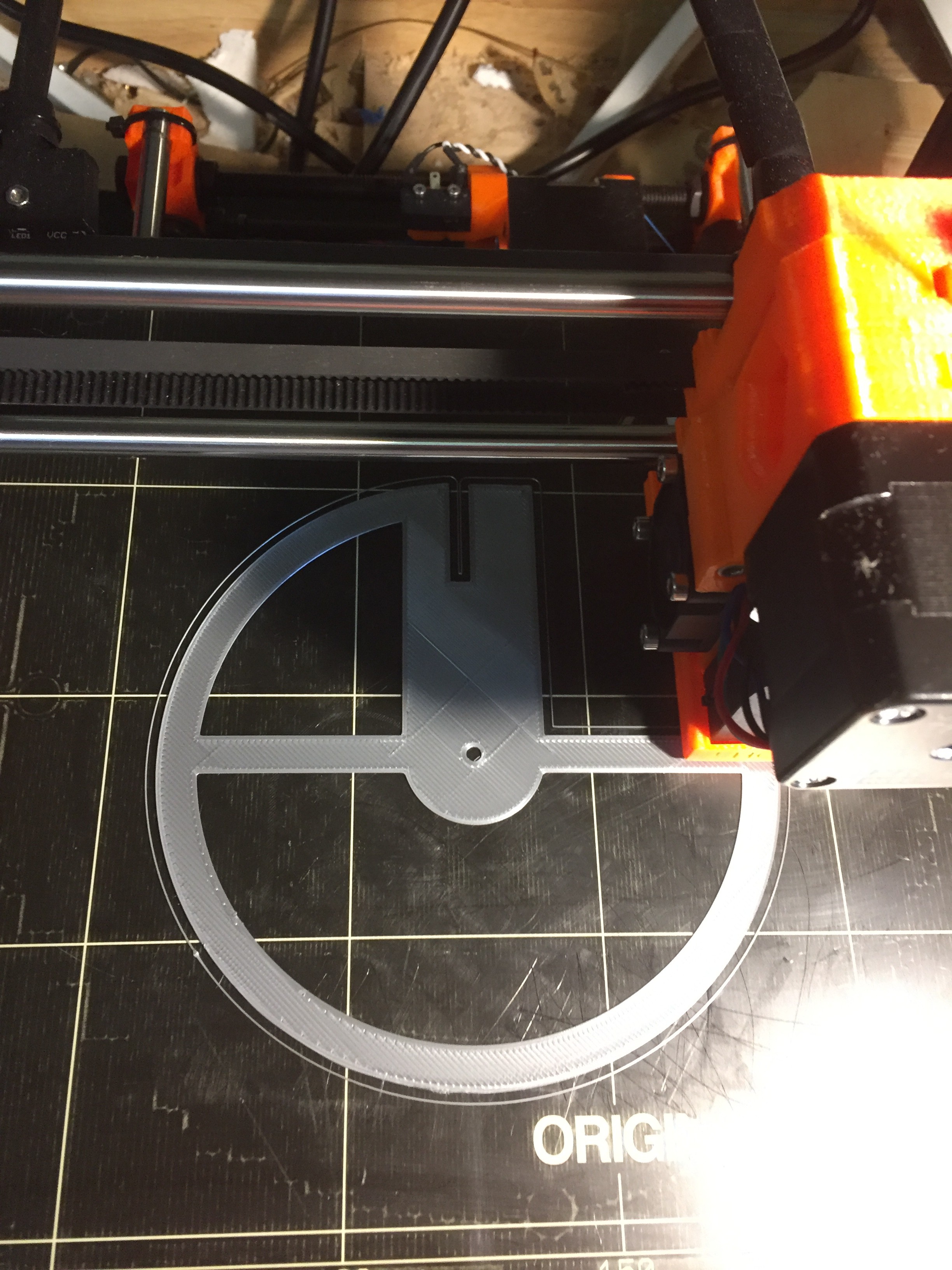
- STL files for 3D printing a prototype unit.
- BOM for non printable components
- Assembly instructions
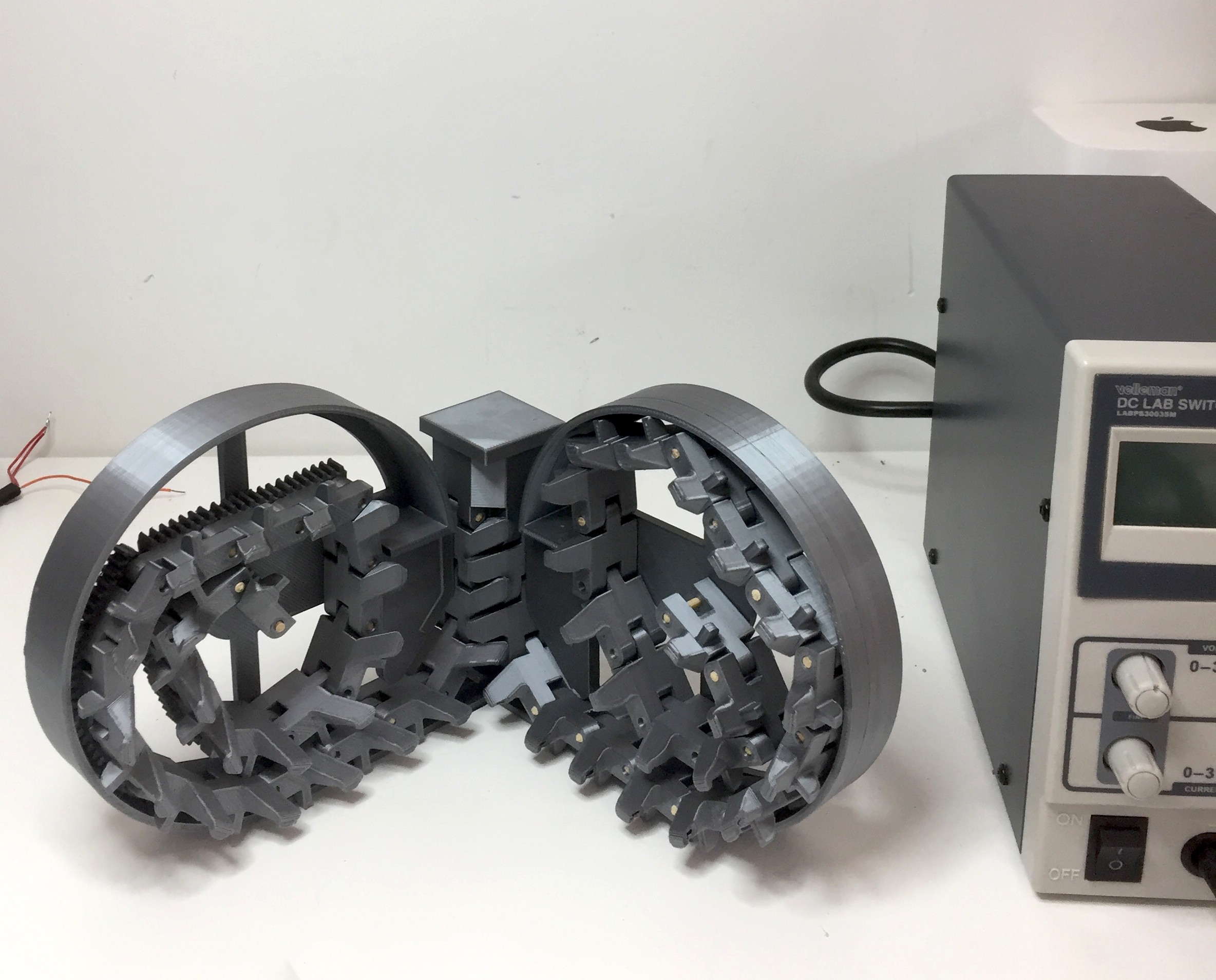
- Video of a working unit
The catalog deliverable will include:
- illustration/rendering of multiple unit configurations
- illustration/rendering of how active and passive actuated units can be combined
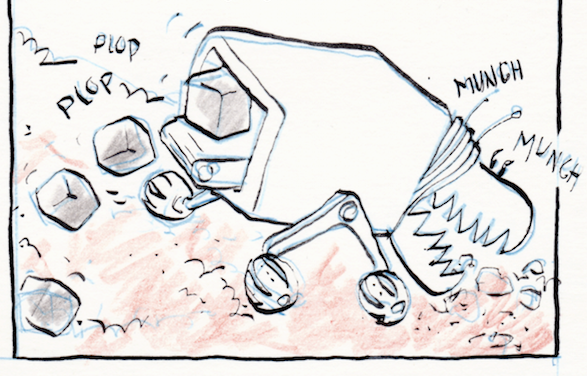
- illustration/rendering of configurations for locomotion strategies
Extended goals
If I reach my deliverables ahead of schedule I will start prototyping a basic multi unit configuration for locomotion.







 Mitja Breznik
Mitja Breznik
 TheStumbler
TheStumbler
 Fabian
Fabian
This is looking very useful idea just like Pickup rental Dubai where you can get some best house shifting service.