 Duane Degn
Duane DegnMany health problems can be successfully treated with modern medicine. Often these treatments require scheduled tasks such as taking medication, measuring one's blood pressure and measuring (and recording) other vital signs. Some of these tasks are easily forgotten or are inconvenient. This robot will make it easier for people to know when to perform specific health maintenance tasks and make it easier to perform these tasks by delivering the required items.
Maintenance Tasks for which the Robot will Provide Assistance
Medication:
The robot will provide reminders of when medications should be taken. The robot will carry the medication to the user to limit the disruption caused by needing to take the medication.
The robot will also keep track of medication refill times and either automatically request refills (if automated refills are supported by the pharmacy) or remind users when refills are due. There will also be an option to notify a third party when refills are required.
Blood Pressure:
A blood pressure cuff will be available on the robot. A reminder to measure blood pressure will be given at the appropriate times. The blood pressure will be automatically recorded to a SD card for later analysis.
Blood Oxygen Level:
If desired, the oxygen level of the blood will be measured and recorded.
Weight:
The robot will remind the user to weigh themselves. The robot will include the weight as part of the medical statistics log.
There will be options to include other information in the medical log. Data about sleeping, diet, exercise and other activity may be included in the log.
The medical log may be transferred to a computer via WiFi, USB or SD card. The medical log may also be reviewed on the robot's touch screen.
Other Uses
The robot may be used in other ways besides the primary task of assisting with health maintenance. These other tasks include:
Security:
The robot may be used to remotely monitor one's home. The robot will be able to detect intruders with a passive infrared sensor.
The robot will include a moisture sensor and be able to detect wet flooring. If moisture indicative of a leak is found, the robot will notify the appropriate person either with a text message or an email.
The robot will have some form of thermal imager. The imager (possibly just 16 pixels) may aid in monitoring the user's health but the thermal imager will also allow the robot to identify a person who has fallen and is unable to get back up. If the robot finds a disabled person on the floor, it will call for help unless instructed otherwise by the user.
Service:
The robot may also be used as a photography platform and assist in photographing special occasions.
One of my "stretch" goals is to provide the robot with an arm strong enough to open a refrigerator and pick up a can of soda. Hopefully the robot will be able to fetch a cold beverage on request.
Note about privacy.
While the robot will have a camera to allow remote viewing of the home, the camera will include a mechanical cover which will block the camera's view unless it is physically moved out of the way. This cover will be motorized to allow the robot to move the cover but the cover will provide reassurance to the user that their privacy is being maintained when the cover is in place.

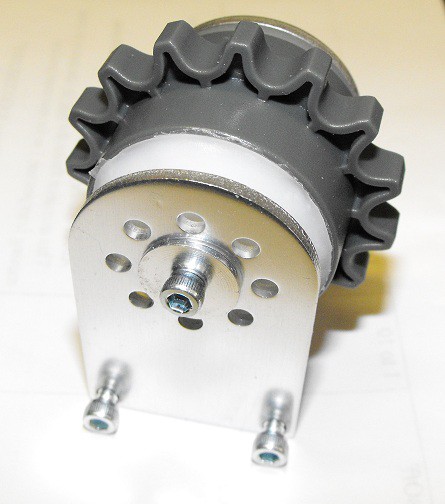




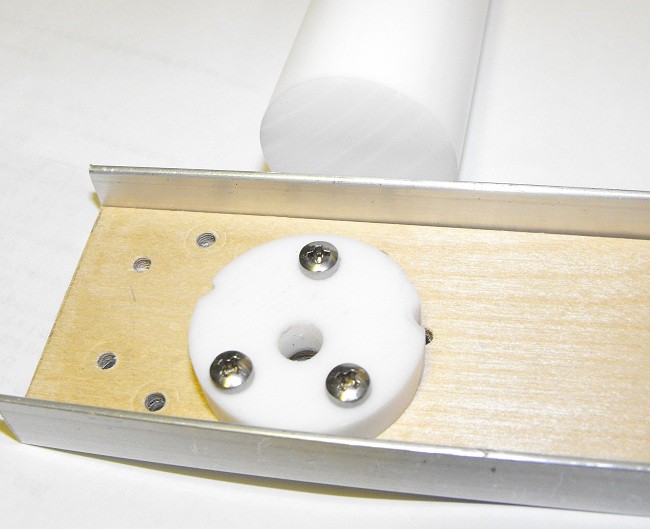





 The set screw is positioned so it doesn't interfere with the tread. The nut embedded in the Polymorph is necessary since the plastic alone would soon strip and not provide anything for the set screw to push against as it clamps down on the "D" shaped drive shaft.
The set screw is positioned so it doesn't interfere with the tread. The nut embedded in the Polymorph is necessary since the plastic alone would soon strip and not provide anything for the set screw to push against as it clamps down on the "D" shaped drive shaft.





 witchdoc
witchdoc
 Dan Royer
Dan Royer
 Ted Huntington
Ted Huntington
 caltadaniel
caltadaniel
Good work. I have got a similar project to help elder people to stay autonomous.
My prototype is based on an old vacuum robot (Neato XV11) mounted with an Android device on it. Old smart phones have many useful components (camera, microphone, cellular, wifi, bluetooth, aso). With the voice recognition it can react on help request. Allowing video conference with close relatives and/or emergency staff.
For the pills dispenser, you can mix with the smart desktop medicine organizer project :
(https://hackaday.io/project/7019-smart-desktop-medicine-organizer)
If the elder lives in a house and not an apartment, to avoid the stairs problem, I choose the one device per floor option.
Keep it up!