 Patrick Joyce
Patrick JoyceThe Problem
Spinal injury is the most common cause of quadriplegia, though there are many diseases that can produce the same result - inability to produce controlled movement in any of your limbs or head. For people in this situation independent control of their wheelchairs is not possible – the technology just isn't available. Independent mobility increases quality of life significantly, and it's loss is keenly felt by those robbed of it, through accident or disease.
The scale of the problem is enormous. ALS is responsible for only a tiny fraction of the people in this situation, yet there are five thousand ALS sufferers at any one time in the UK alone, and twenty thousand in the US. Most of them will end up sat immobile in their wheelchairs, unable to move on their own. Eyedrivomatic could help most of them.
The Concept
To create an inexpensive and accessible way for people with motorised wheelchairs to take control of their mobility via eye movement, using open source methods as much as possible.
Our team
Patrick Joyce - Team captain
Steve Evans - Test pilot
David Hopkinson - Film maker
Cody Barnes - Software Developer
Steve and I both have Motor Neuron Disease, or ALS as it's also known. We both have electric wheelchairs, but while I still have some remaining movement in my fingers, and am just able to operate mine, Steve only has his eyes left, and until Eyedrivomatic, had to rely on his carer to operate his.
Background
It is usual for people with MND/ALS in the UK to be provided with electric wheelchairs loaned by the health service, for as long as we need them. Steve and I have wheelchairs, and we both also have eyegaze equipment (which is becoming increasingly more available). At the moment it is not possible to operate one with the other. Eyegaze technology is only intended for operating a computer, not the chair.
The Original Idea
As I don't actually own either the wheelchair or the eyegaze, my idea was to make something that would interface with the user's chair mounted computer, and physically move the joystick. Crucially this would mean not making any modifications to the loaned hardware, and could work with any wheelchair and eyegaze combination.
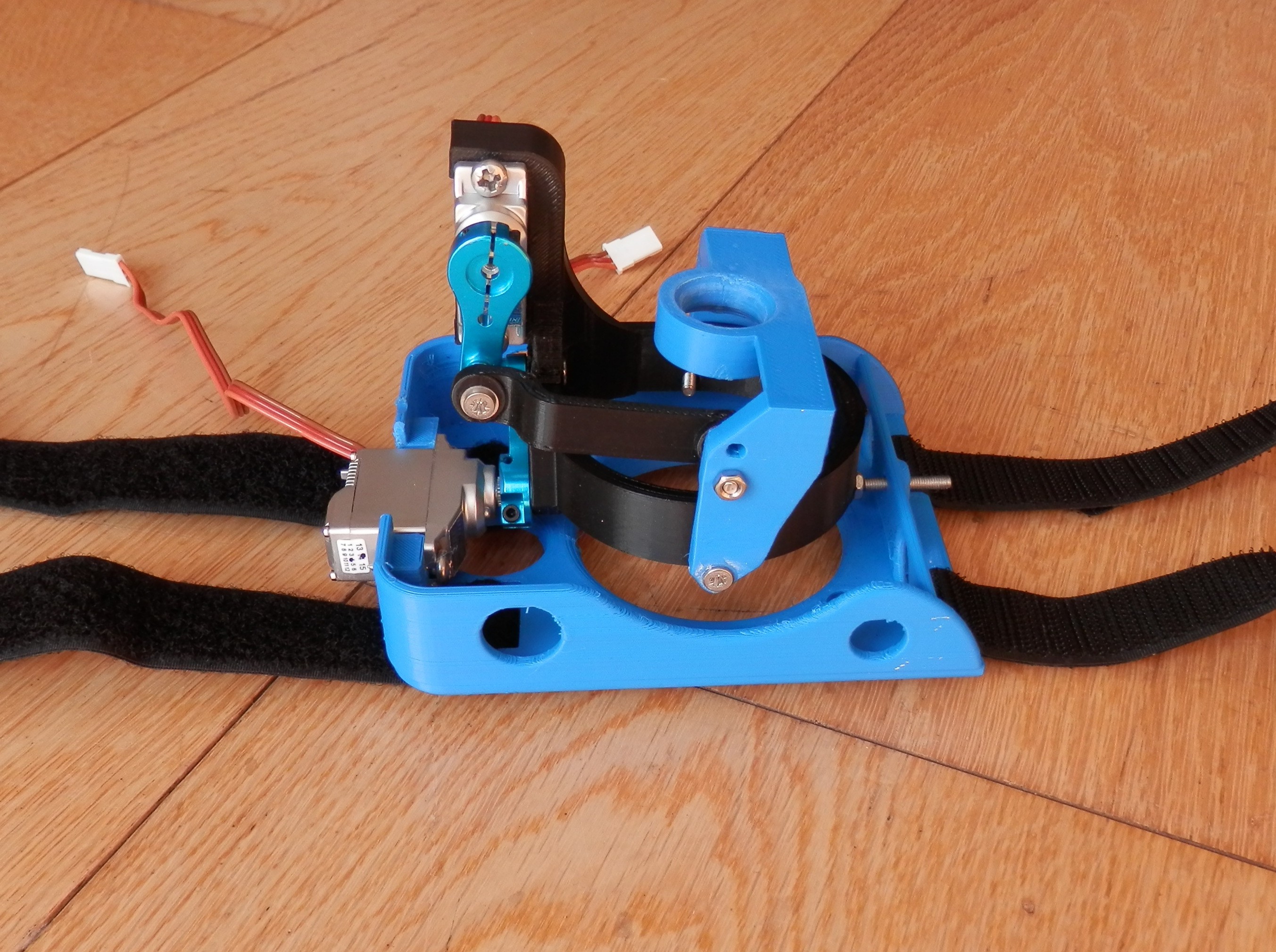
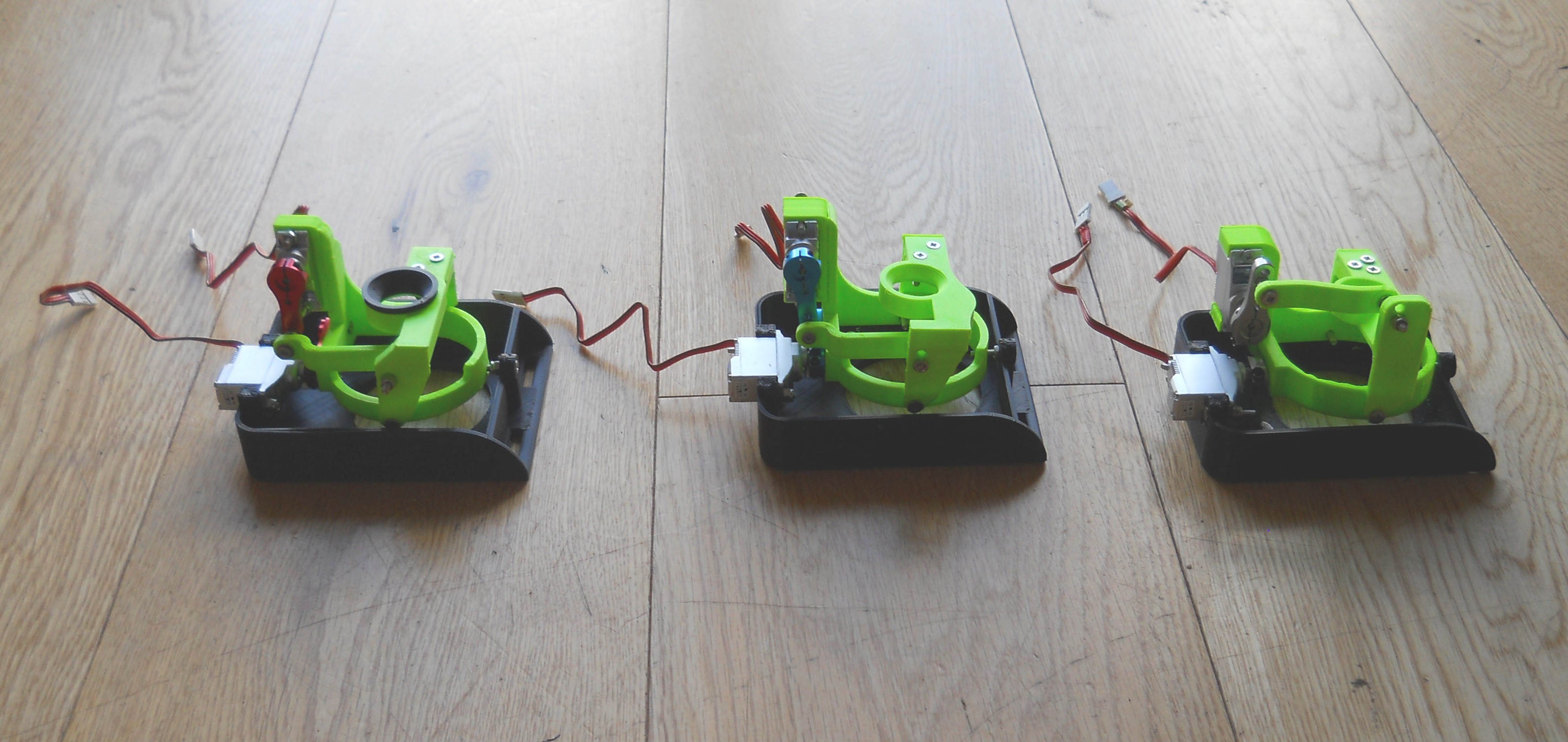
The solution I came up with is called Eyedrivomatic, and is a two part system, a 'brain box', containing an arduino and four relays, and an 'electronic hand', containing servos to move the wheelchair's joystick.
I decided on this approach, rather than interfacing directly with the wheelchair's electronics for several reasons. I know the protocols for my own chair, but not all chairs use the same protocol. Also, my chair has a socket for plugging in external joysticks, but that is by no means common on other chairs. And the sockets are of a proprietary design. Interfacing directly would, on most chairs, involve physically cutting in to the wheelchair's wiring.
This is an issue because many people don’t actually own their chairs – especially in the UK where they are loaned by the health service and will be reclaimed after the user’s death.
An integrated version of eyedrivomatic in new chairs would be brilliant, but this hacking – yet non-interfering – approach to existing tech means the problem can be solved cheaply and easily for those who need it as soon as possible.
This is especially important as ALS usually has a very rapid onset and people losing their mobility need a practical and inexpensive solution as soon as possible with what is immediately available.
Two years in development, eyedrivomatic now works well, and is;
- Easy to use
- Safe
- Expandable - the system is able to control other external devices according to the needs of the user
- Totally open, both open hardware and open source software
- Capable of being built at home - by an unskilled person
- Soon to be a manufactured product as well
I put in a four relay module as standard equipment in the brain box. These relays are for operating external switches of the user's choosing. Many wheelchairs have tilt/recline...
Read more »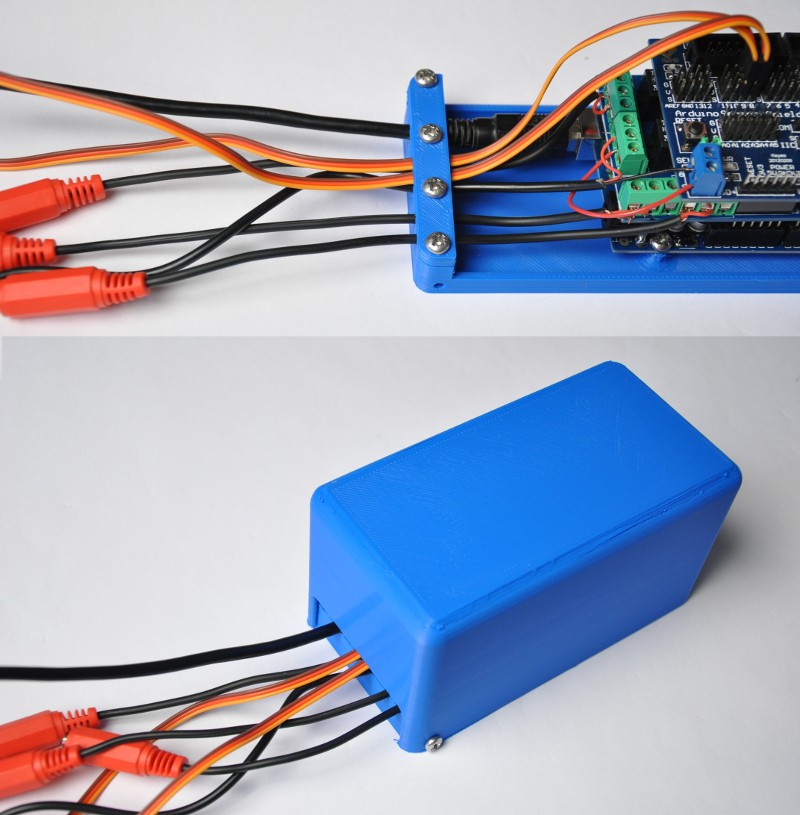











 Crypto [Neo]
Crypto [Neo]
 AngelLM
AngelLM
 Helen Leigh
Helen Leigh
wow