 Jason Bowling
Jason BowlingOverview and Goals
Hello, interested reader. I have benefited so much from other people's blog posts, both in my hobbies and my professional life, that I decided it was high time I contributed a little. I hope that someone finds it useful.
I've been interested in remotely operated vehicles for some time - projects like those on DIY Drones, OpenROV, and plenty of others are absolutely fascinating to me. I like the idea of being able to send a machine into inaccessible areas for science or exploration. I decided to focus on a network-driven rover at first, with the intent of learning what it takes to drive something over a network.
My intend is to document that process here. I've seen similar projects on the web, but I've never seen the design process documented - the tradeoffs, the software architechture, the naive assumptions that proved wrong. So that's what I'll try to do.
The idea was to send commands from a computer or tablet to an Android phone, which would interface to the very cool IOIO board. Android phones have the advantage of packing a lot of processing power into a small, low power package, along with numerous sensors. That makes it a pretty attractive platform for a remotely operated vehicle (ROV) or robot.
I wanted to be able to send back sensor data from the rover, such as video, voltage levels, accelerometers, GPS data, etc. and display them on a simple console. So on the network, the command traffic would look like:
rover sends current sensor data to console
console sends back commands (turn on motors, etc)
repeat
Video would be handled on a separate connection.
This seems simple. If you've ever done socket and thread programming, it probably is. If you've never done that, or written a program for Android, it's not so simple, and it's an excellent learning experience. It's also a ton of fun.. getting an LED to turn on in response to a command over the network the first time is seriously cool.
Android Development and IOIO Basics
When I first started the project, I had never written an Android program before. I've built simple Atmel-AVR and Basic Stamp robots, and usually the first thing you do is make sure you can blink an LED from the microprocessor - it's "Hello, world" for micros. First, I needed to get the compiler up and running for Android, and understand something about how Android works.
I started with the excellent Android dev tutorials and worked through the first few programs. I then followed the tutorial at Sparkfun to get the IOIO sample projects working, and tinkered with them a bit. I found that the IOIO worked great on my Galaxy Nexus and Kyros 7127. My older Droid X2 needs the USB connection set to "charge only" to work. I plan on using the Droid for the rover. I am pretty impressed with the design of the development kit for Android, and extremely impressed with the IOIO. A great deal of thought has gone into making it easy to program for and interface things with.
I first experimented with the Hello IOIO application, which runs a GUI application and a thread to talk to the IOIO. It worked fine, and is a great way to test the IOIO on your phone. The Hello application let's you turn an LED on the IOIO on and off from the phone.
The sample programs also include a sample service, that runs in the background and only communicates with the user via statuses. I decided this was the way to go for controlling a rover. Android apps have life cycle that you must track to deal with incoming calls, screen rotation, and other events. That actually tears down the program and restarts it, and your program has to deal with it. This is not ideal for a realtime control application.
The service makes it a little trickier to provide feedback and debug, but you can use the logging feature to get what you need. A robot or rover will be talking to the user over the network anyway, right? :-)
The next step was to decide how to handle the networking aspects, which proved to be very interesting. That will be the topic of the next section....
Read more »
 lpauly
lpauly
 Charles Yarnold
Charles Yarnold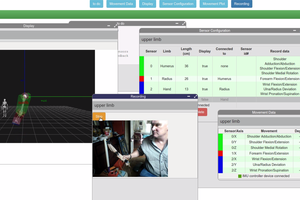
 Jonathan Kelly
Jonathan Kelly
 James Newton
James Newton