0%
0%
Firefly — A Low-Cost Flying Robot to Save Lives
Firefly is a low-cost, modular flying robot for first responders that uses intelligent, nature-inspired algorithms to navigate autonomously.
 Mihir Garimella
Mihir GarimellaBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
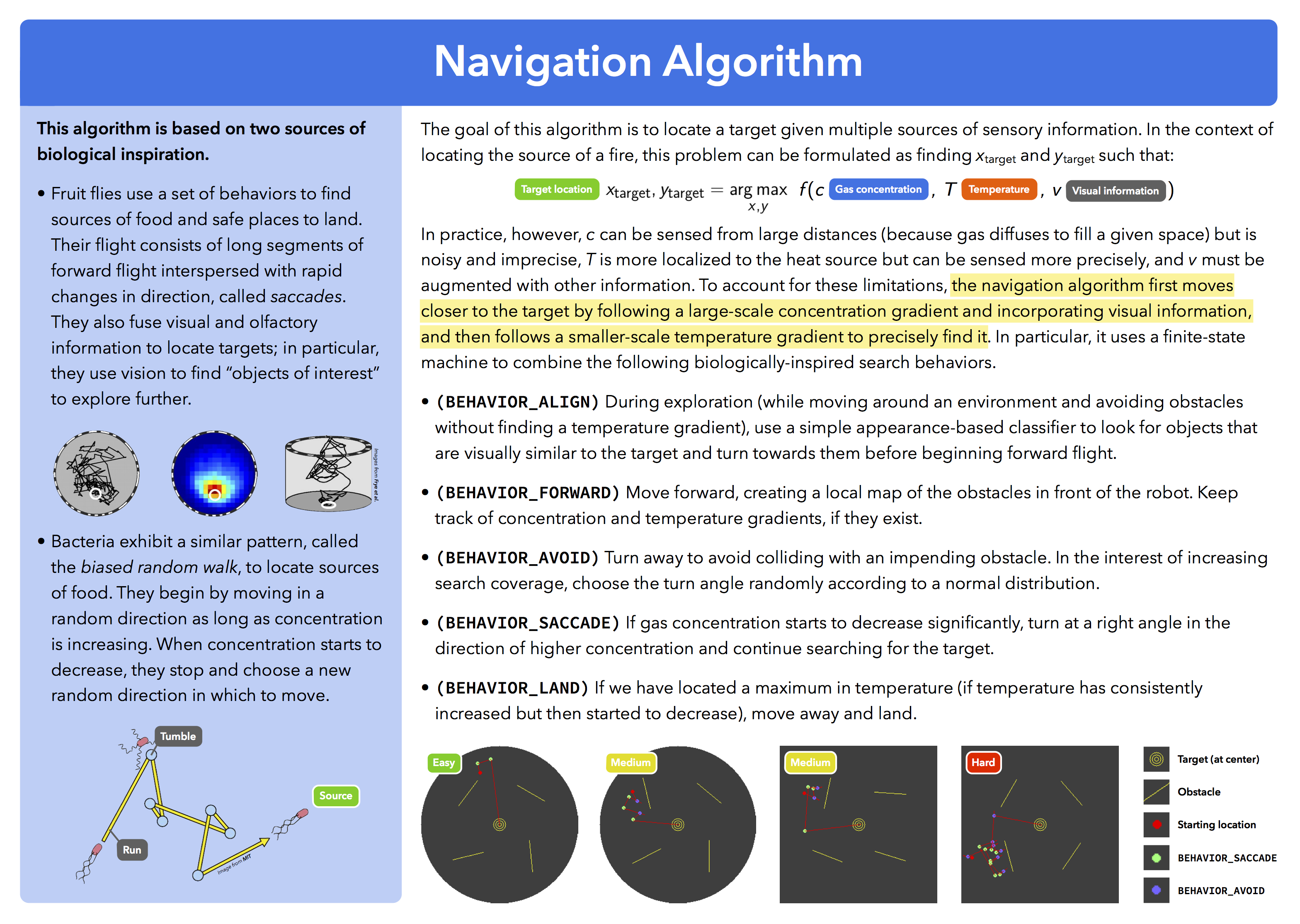
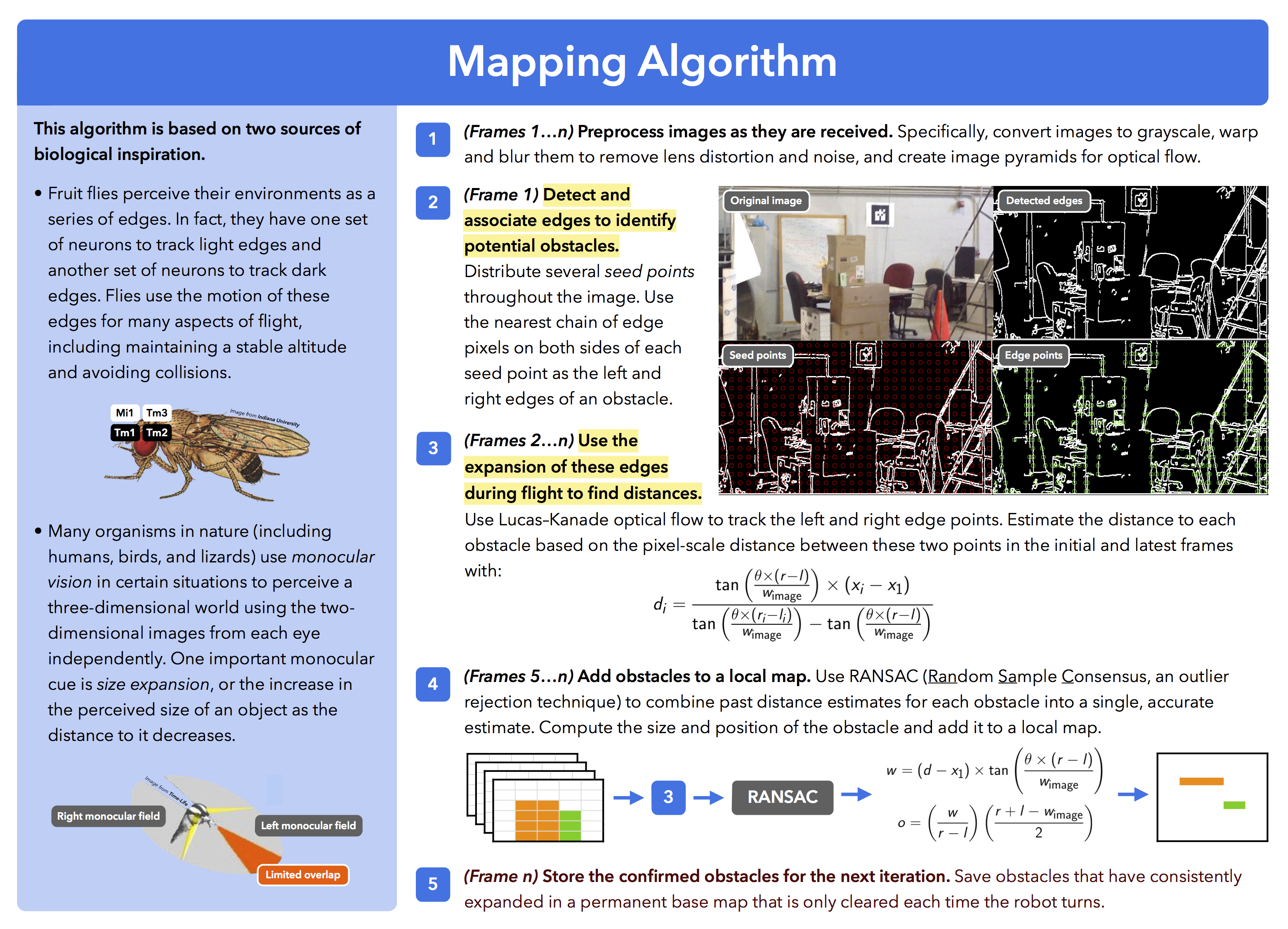 This algorithm proved to be able to avoid obstacles of different sizes, shapes, colors, and textures
This algorithm proved to be able to avoid obstacles of different sizes, shapes, colors, and textures





 Spencer
Spencer
 Pablo Leyva
Pablo Leyva
 Sinclair Gurny
Sinclair Gurny
 Radu Motisan
Radu Motisan
If you need a rudimentary camera with little video data as possible, lookup up RAMera. It was an old idea to take the top of of RAM chip and use it's digital output as a digital camera. The resulting resolution is really bad, probably as bad a a fruit fly's vision.
You could rename your project: VIDalia
Vidalia is a genus of fruit flies in the family Tephritidae. Also the prefix VID denotes something to do with the eye like in video. That may be apropos?