 jay-t
jay-tThis project was inspired by the Mousey from Make magazine.
I wanted to build a robot which fits inside a mouse case and is controlled by a Parallax Propeller microcontroller.
I listed some components I used, this list is not complete but the main parts are there.
The mouse was an Commodore Amiga mouse. I removed the board and drilled some holes in the upper half for all the wires. It was a good choice because it's rectangular inside so my main board fits right.
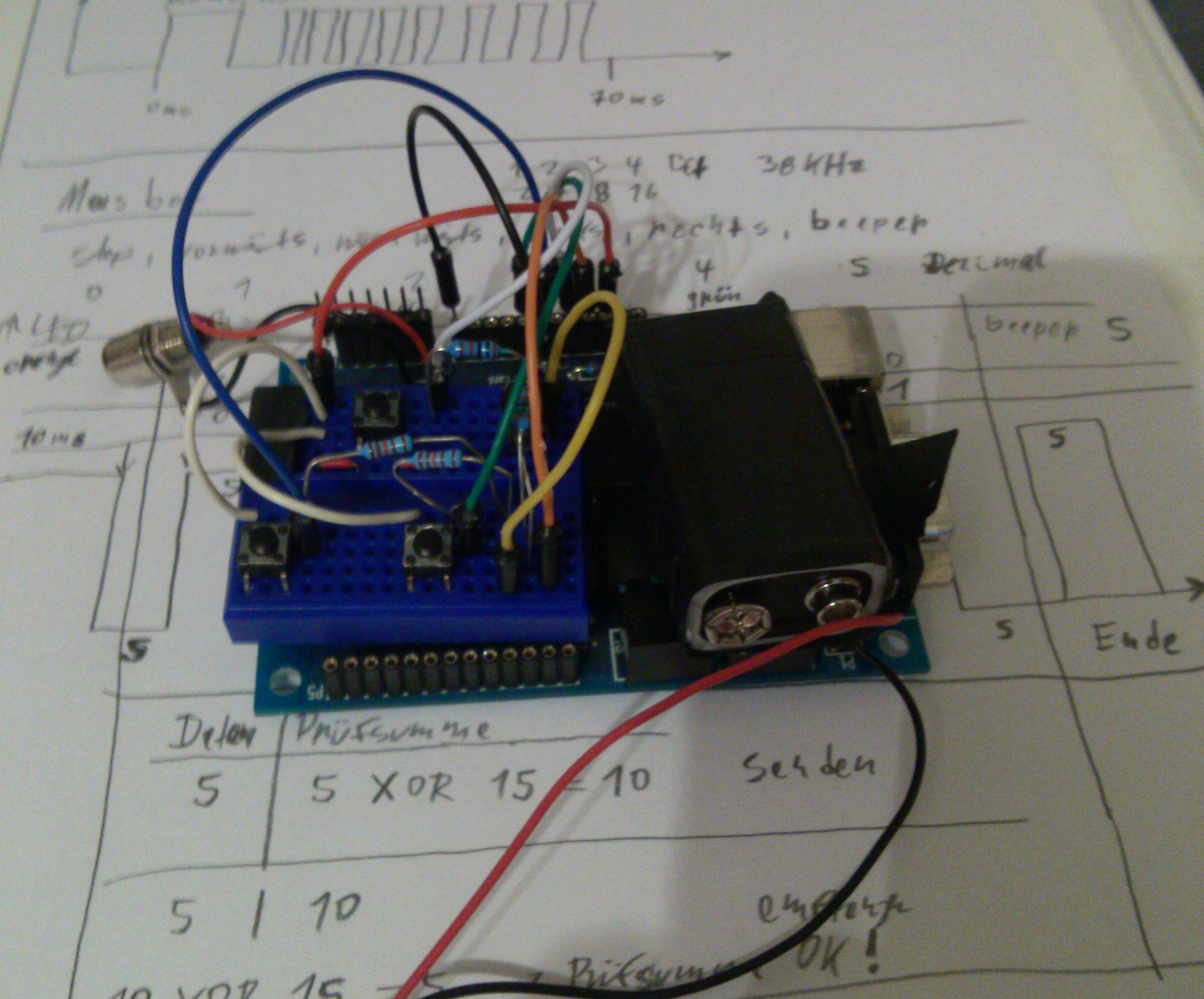
The schematics are only on paper now, I will draw them with Kicad and publish them later. They are based on some Parallax learning circuits for robotics and some other ideas I found on the web.
As can be seen on the photo it's a mess of wires which needs some carefull planning on the colors to use. I made a clip on the gps module mounting hole and strapped the wires to that. I have to put them together to close the mouse case.
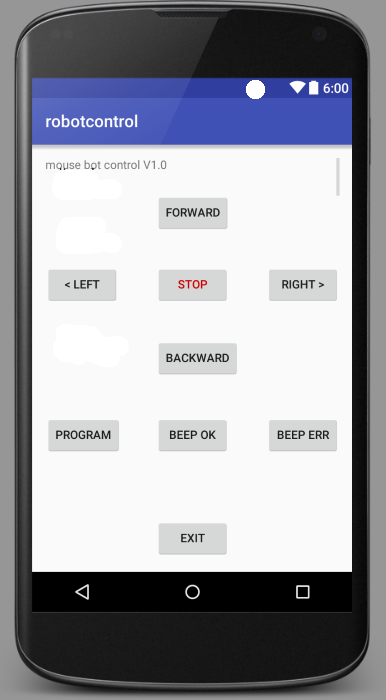
Mousey is now programmed by a Tachyon forth control program. Mousey now drives around and should avoid running into obstacles via the three IR sensors.
Finally I mounted the gear motors and wheels so Mousey can now drive.



 lion mclionhead
lion mclionhead
 Matthias Hasenfus
Matthias Hasenfus
 Timo Birnschein
Timo Birnschein
 davedarko
davedarko
Do you have a new blog address for the TF code etc.? The one on the Hackaday sight will not work.