 agp.cooper
agp.cooperDalek Plans
Well I bought a set of Dalek "plans":
A Small Diversion
Last year here was my attempt at scaring the kids away:

These guys were painted with phosphorescent paint so with a UV light they glow in the dark.
My Dalek Creature
Inside my Dalek is this guy - the Dalek Creature!

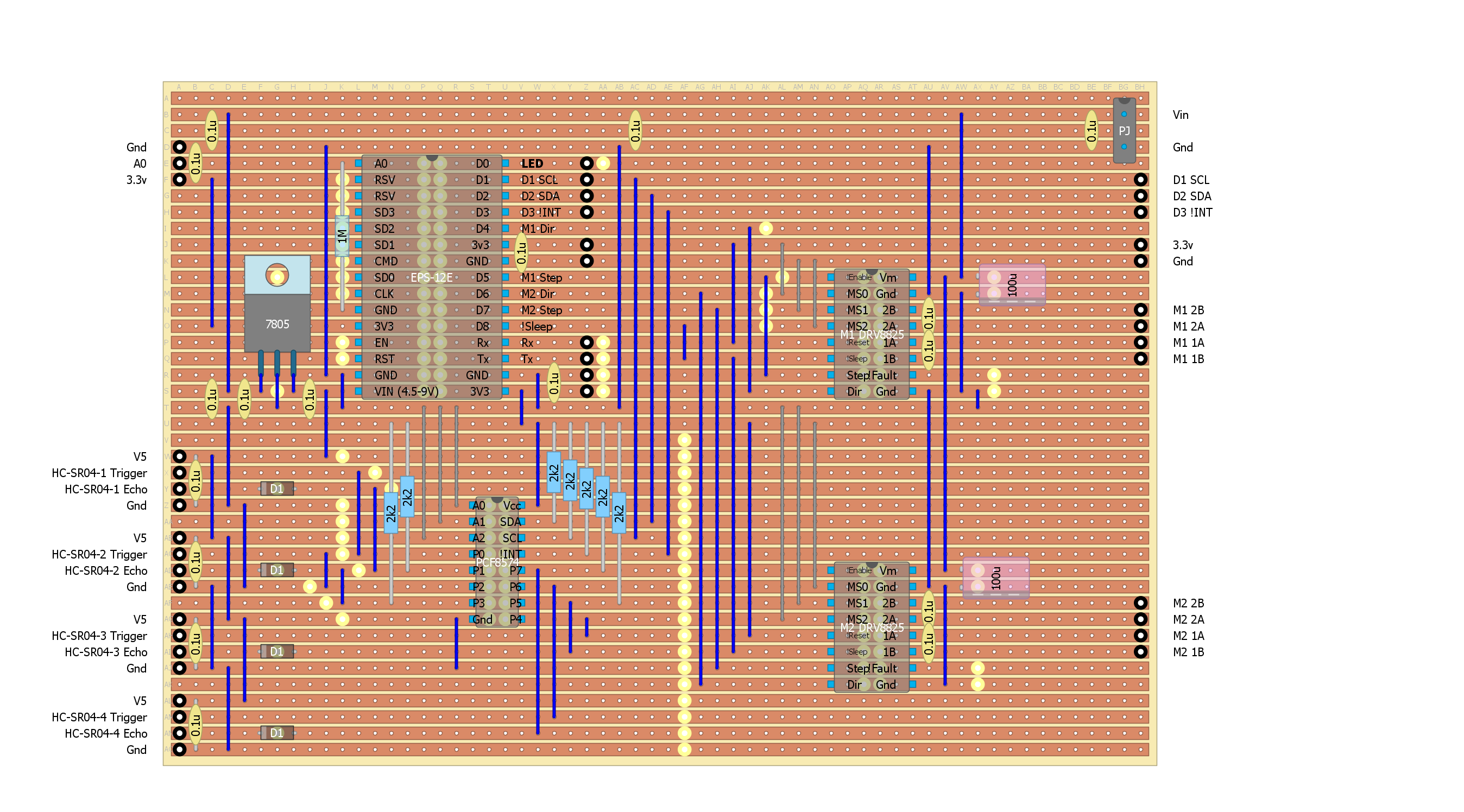
The Dalek Build
Basically a remote controlled WIFI Arduino controlling stepper motor drive, a Dalek voice with one phrase - "Exterminate". Perhaps a Nerf gun?
AlanX
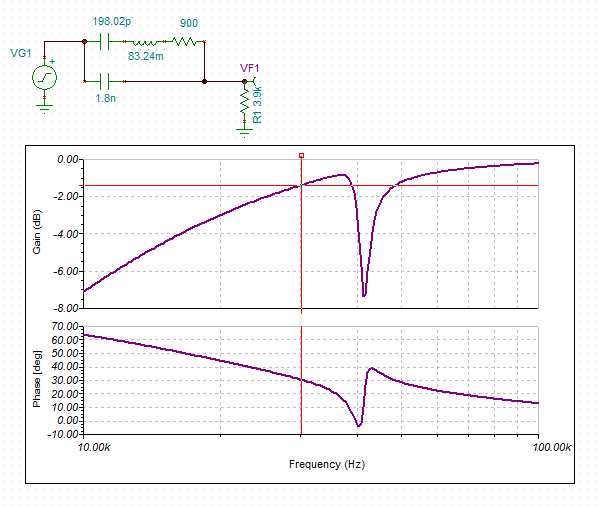
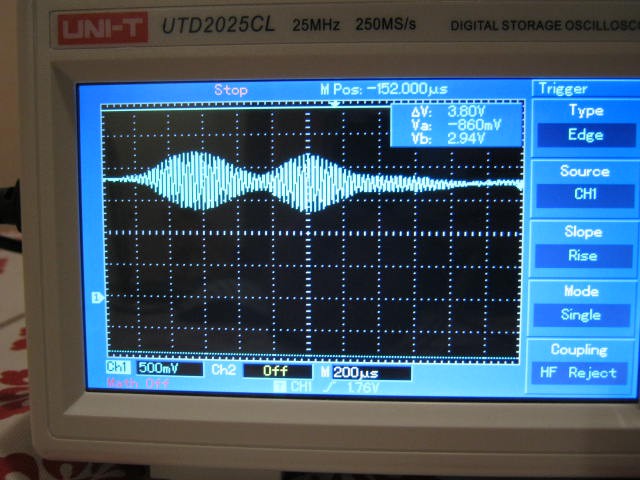
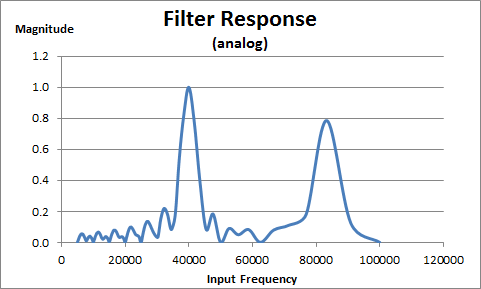
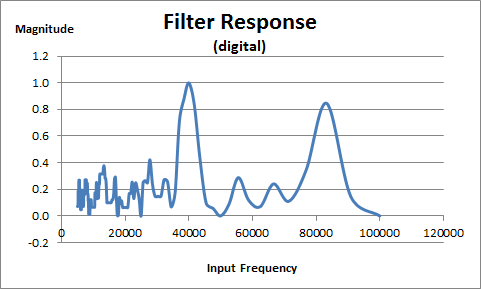
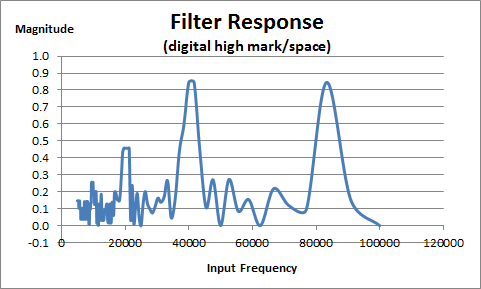
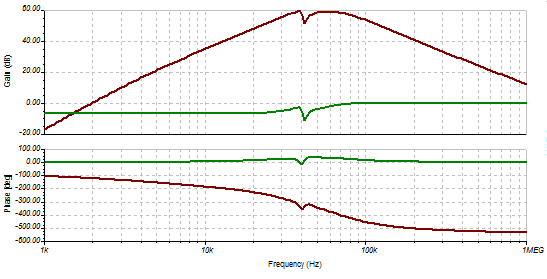
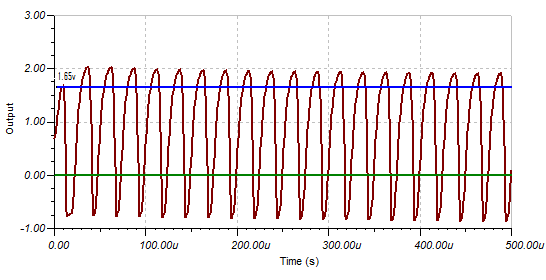
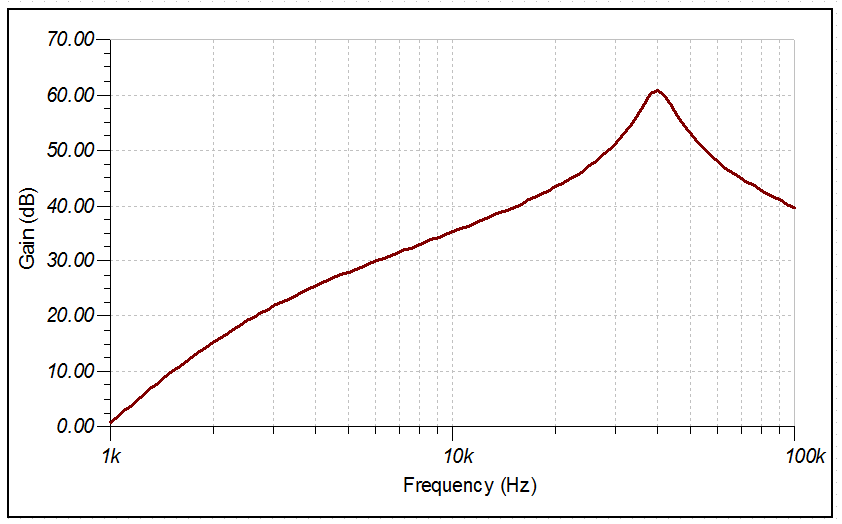
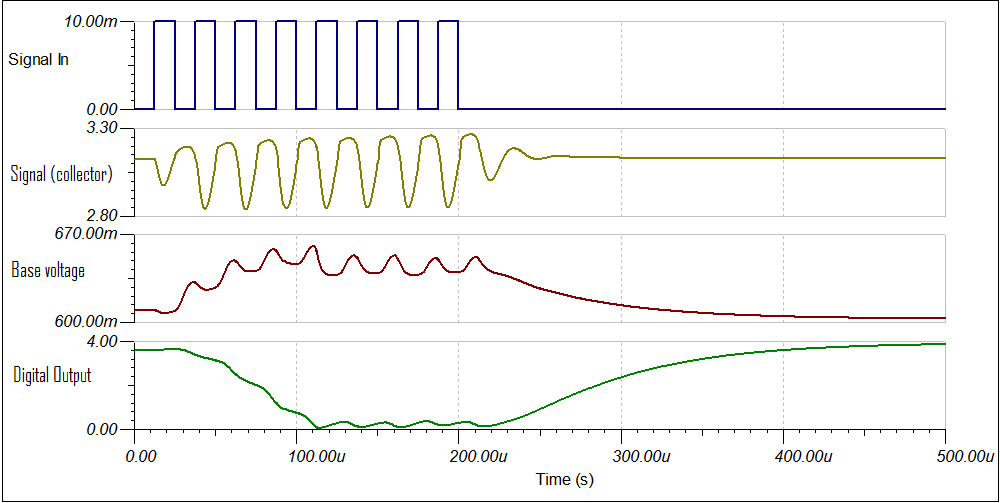
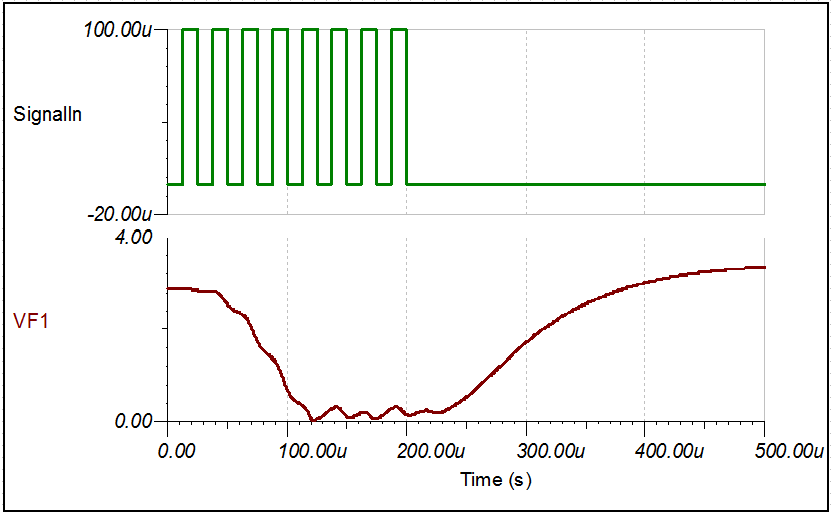
 Here is the response for the active filter (the IC2:C):
Here is the response for the active filter (the IC2:C):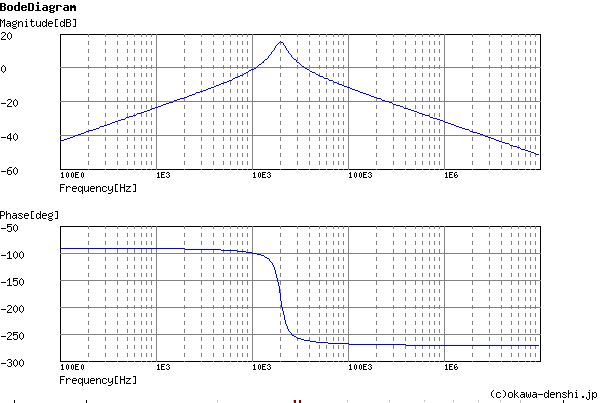
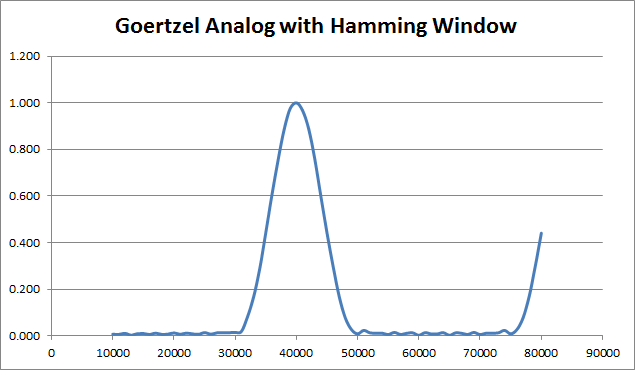
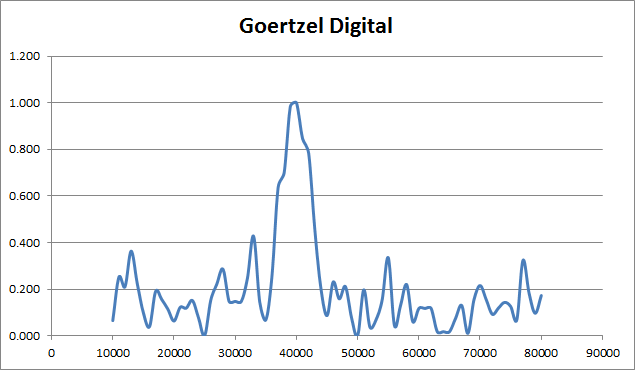
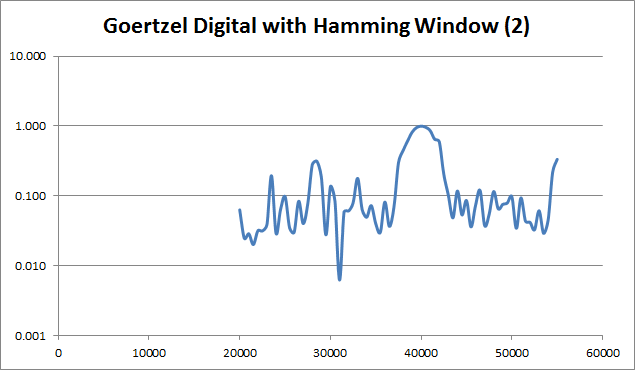
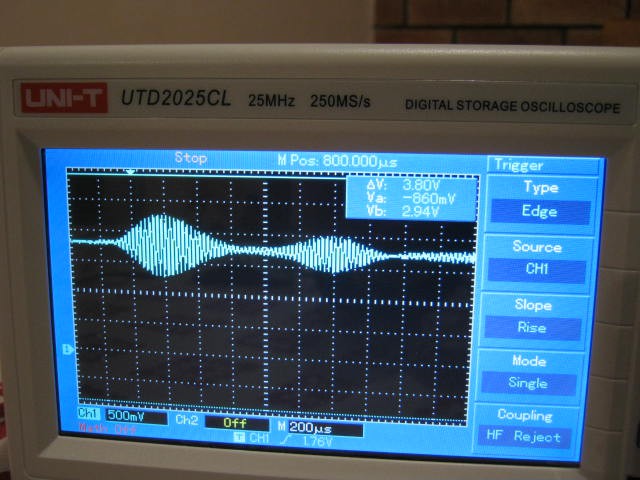
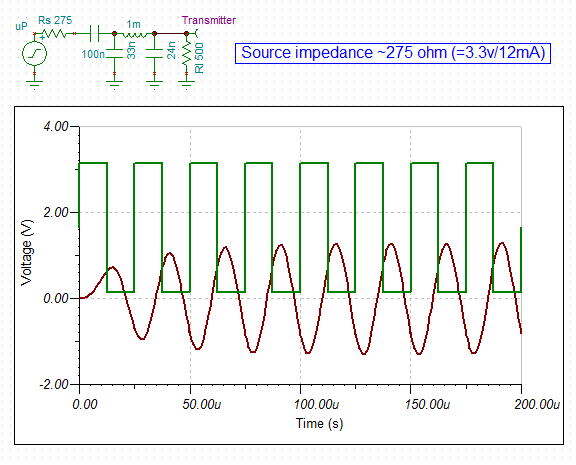
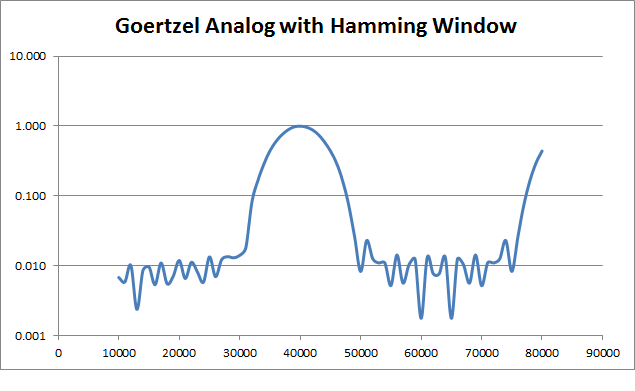 So it would appear that either a very fast digital read (>1 Mhz) or the analog read (=125 kHz on the ATTiny85) can work.
So it would appear that either a very fast digital read (>1 Mhz) or the analog read (=125 kHz on the ATTiny85) can work.




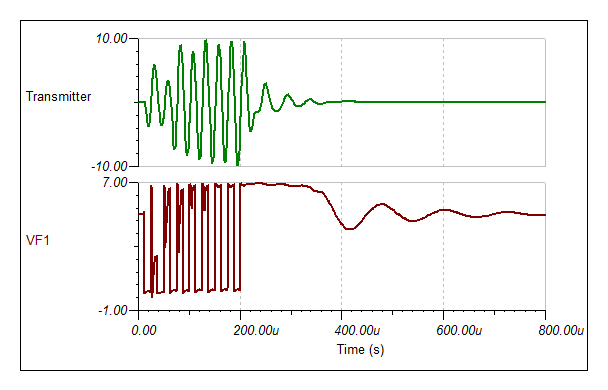



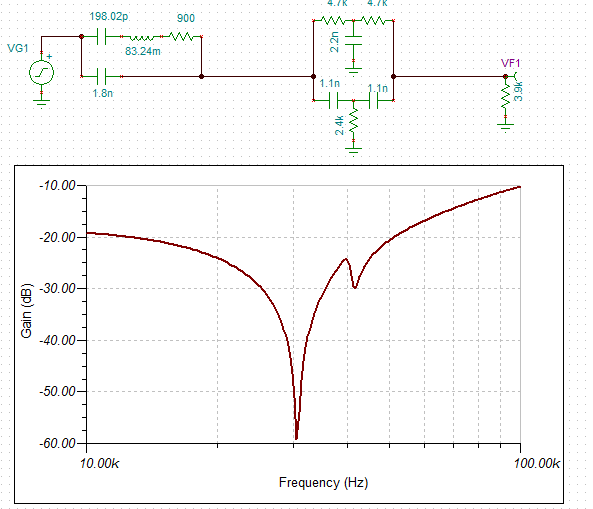
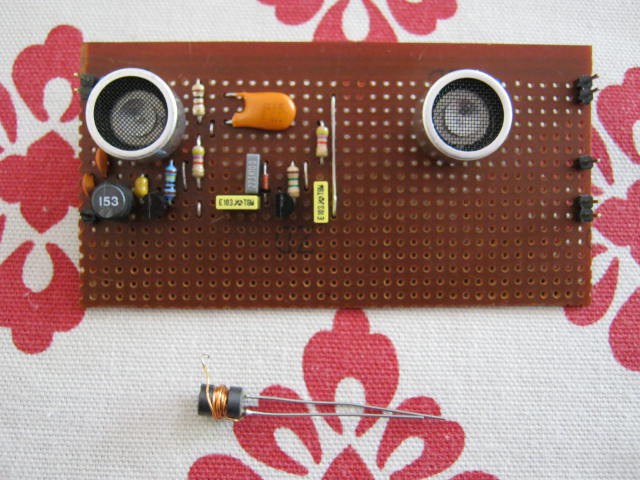
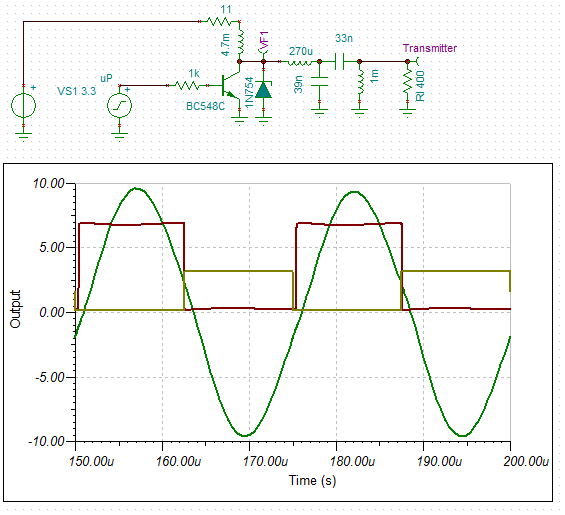
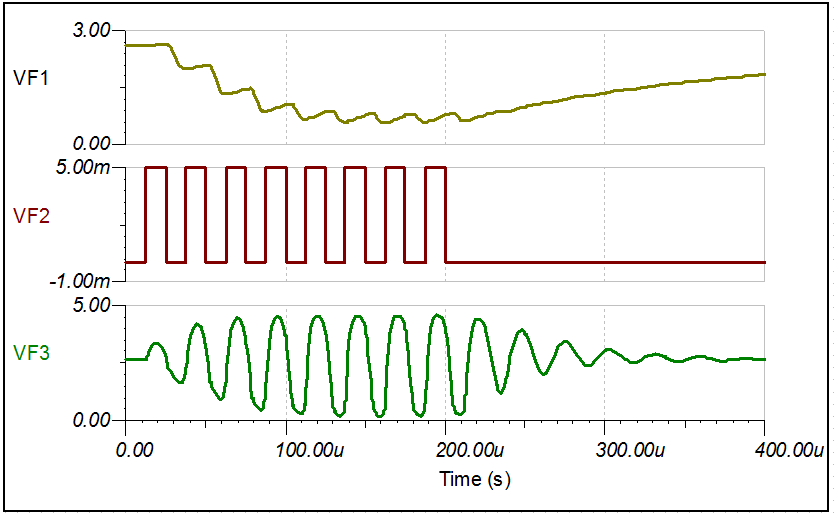
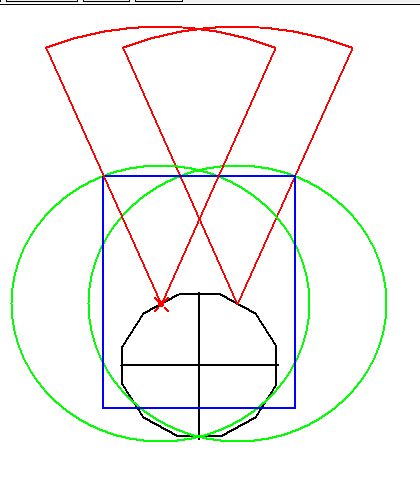
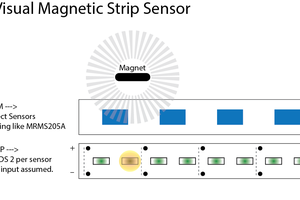
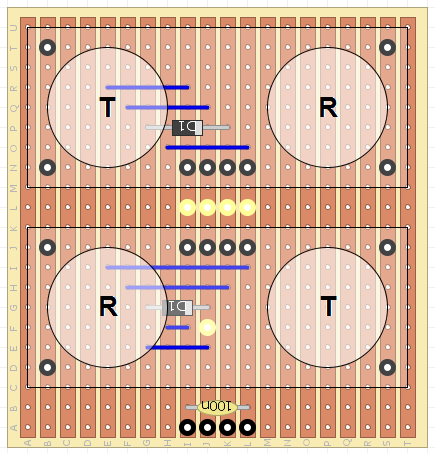 The transit and receive sensor pairs are about 36 mm apart (~1/2 wave length).
The transit and receive sensor pairs are about 36 mm apart (~1/2 wave length).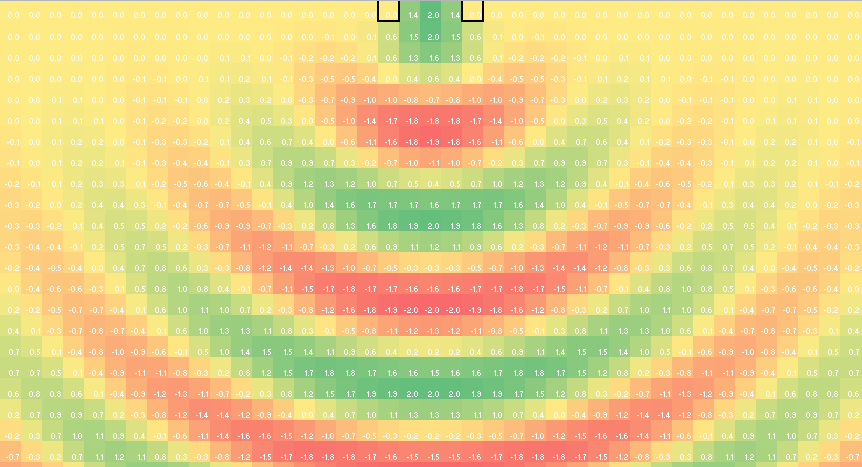
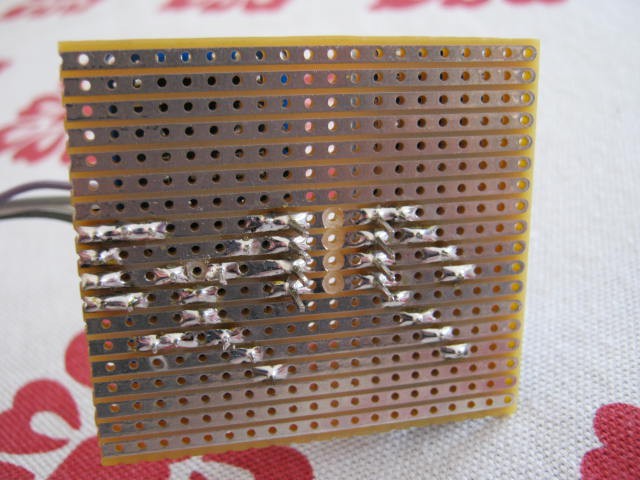
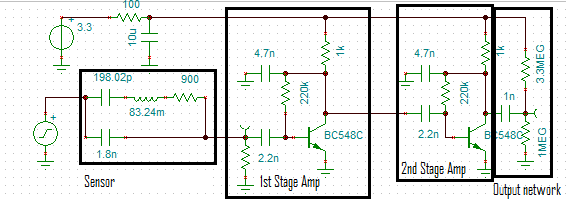
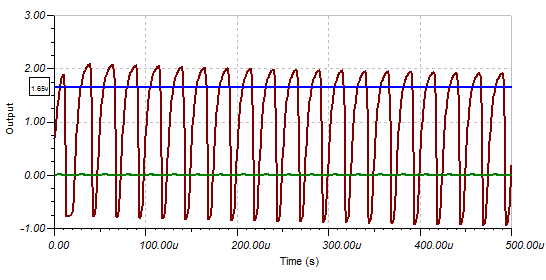

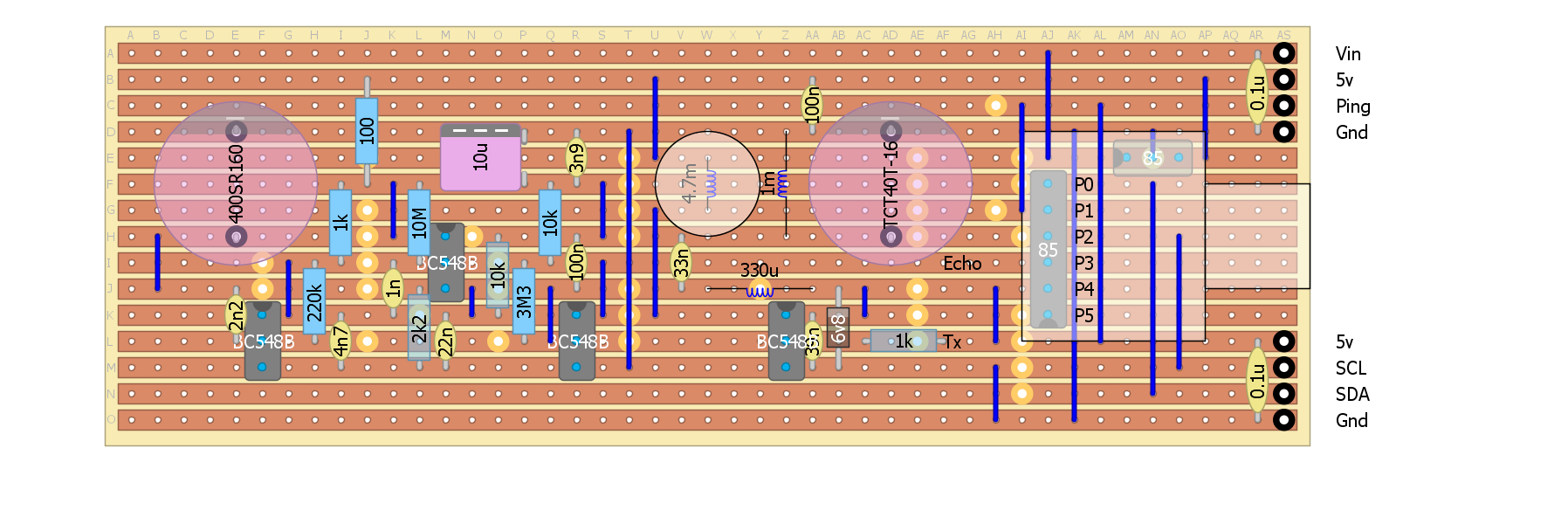
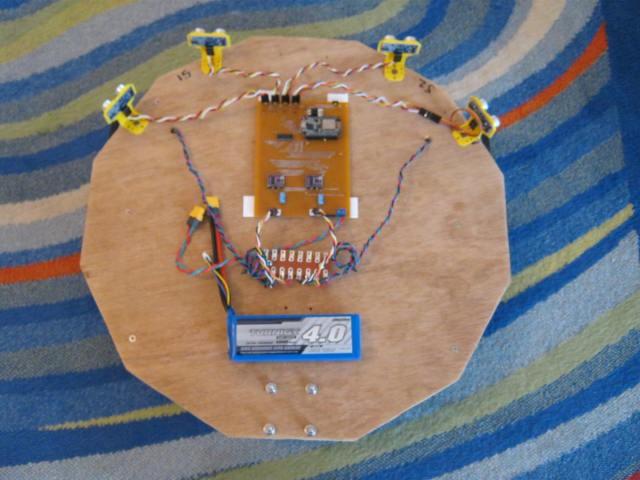
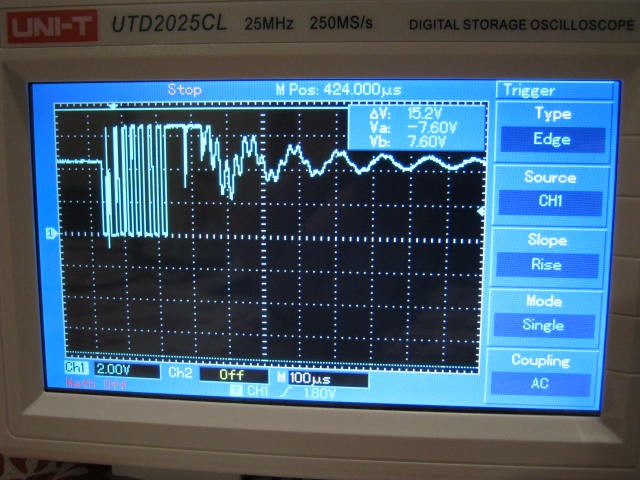
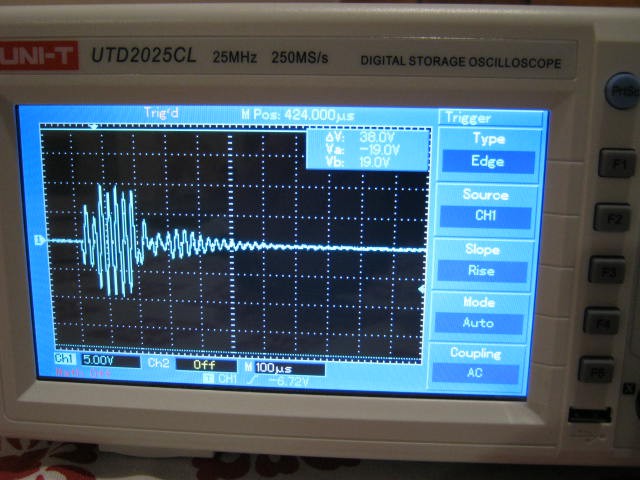
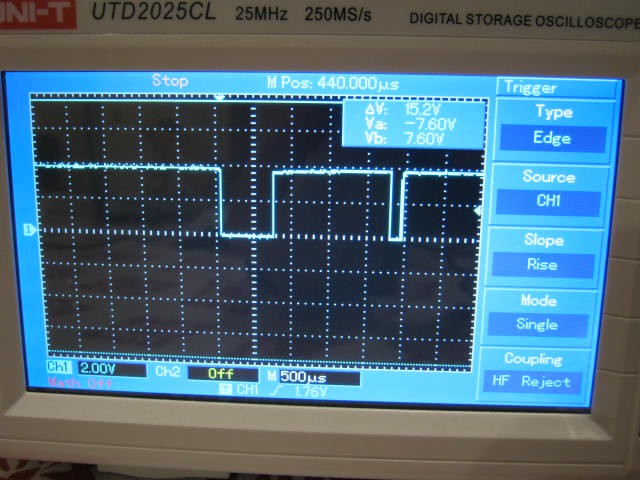
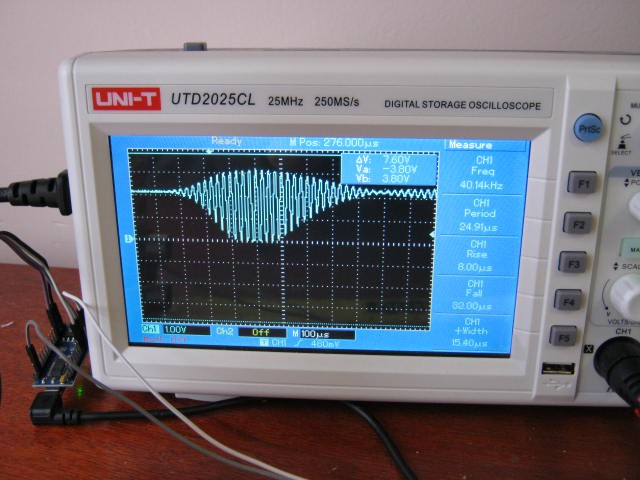
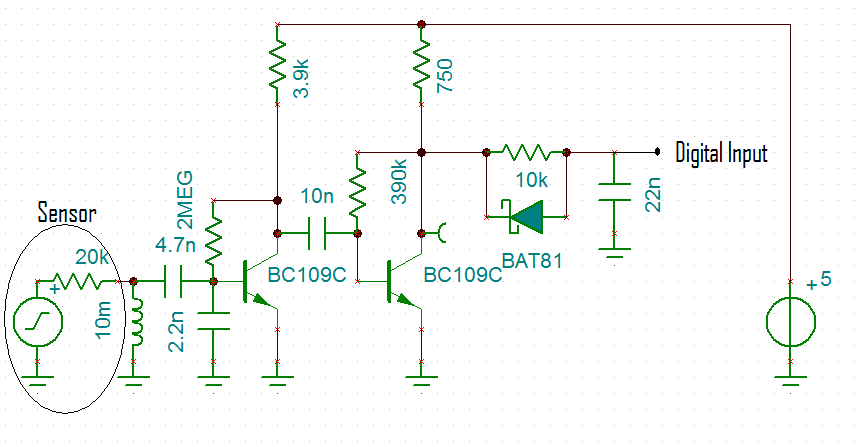
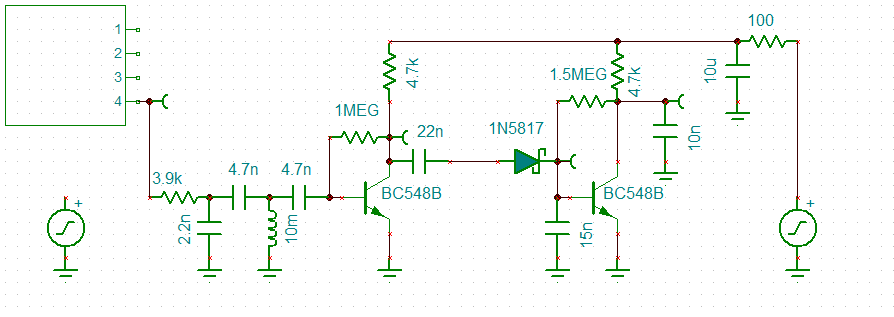
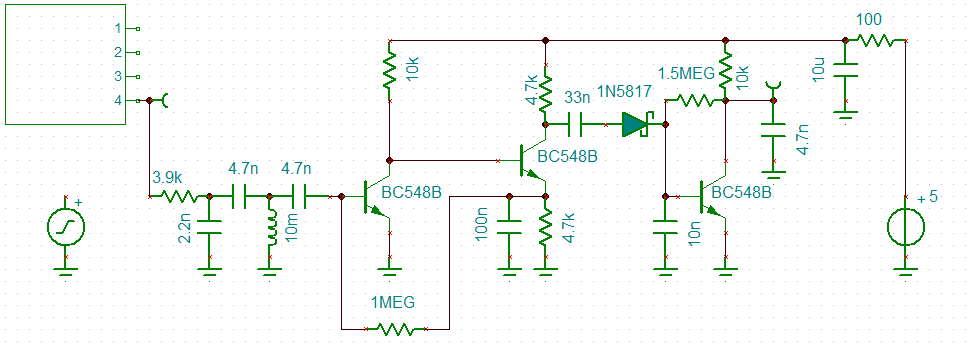
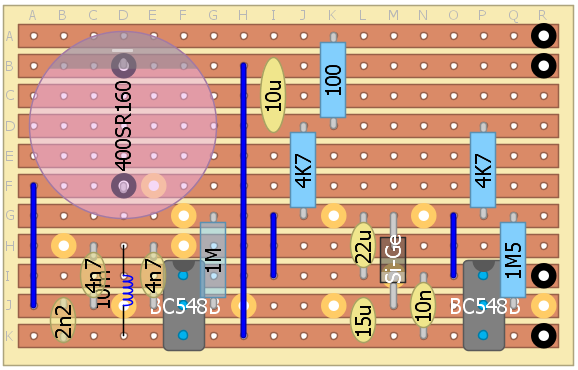
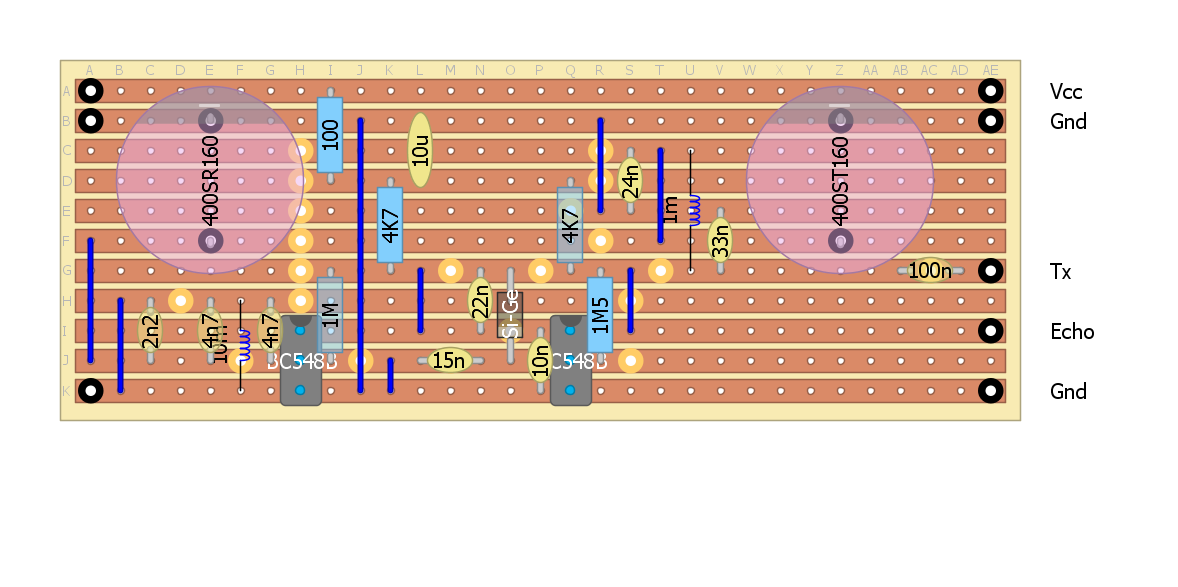
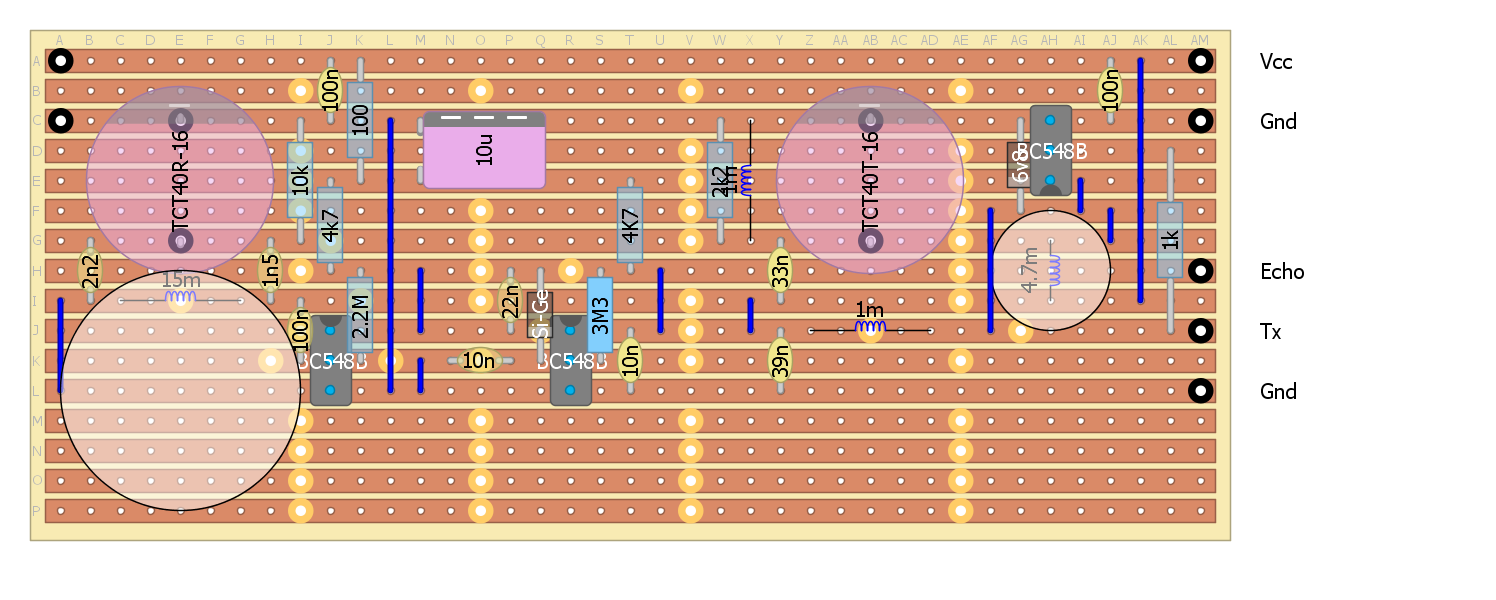 Here is the receiver:
Here is the receiver: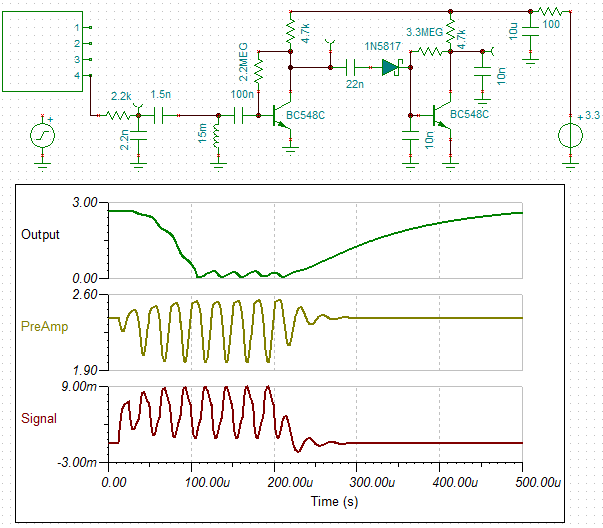









 Deezmaker
Deezmaker
 junkotron
junkotron
 Ruediger F. Loeckenhoff
Ruediger F. Loeckenhoff
Following