 risknc
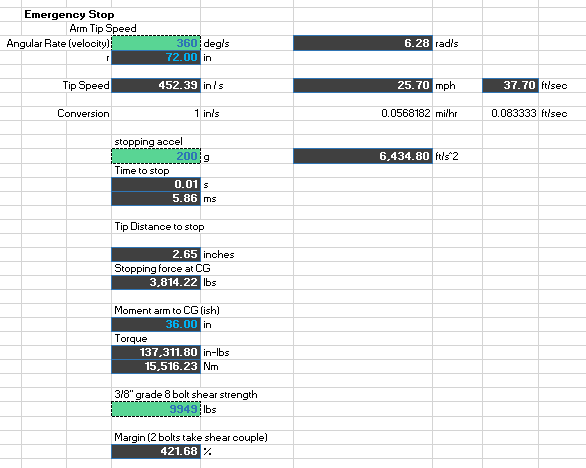
riskncThis will be a significant challenge due to the desired accuracy / scale of the arm.
Some Considerations
- Motor Selection - Aiming for Brushless DC for power density / low cost
- Driver Selection - Currently using Odrive, looking to implement with FOC (field oriented control) for low vibe / high torque at low speed.
- Encoder Selection - Investigating implementing 16 bit magnetic encoders w/odrive
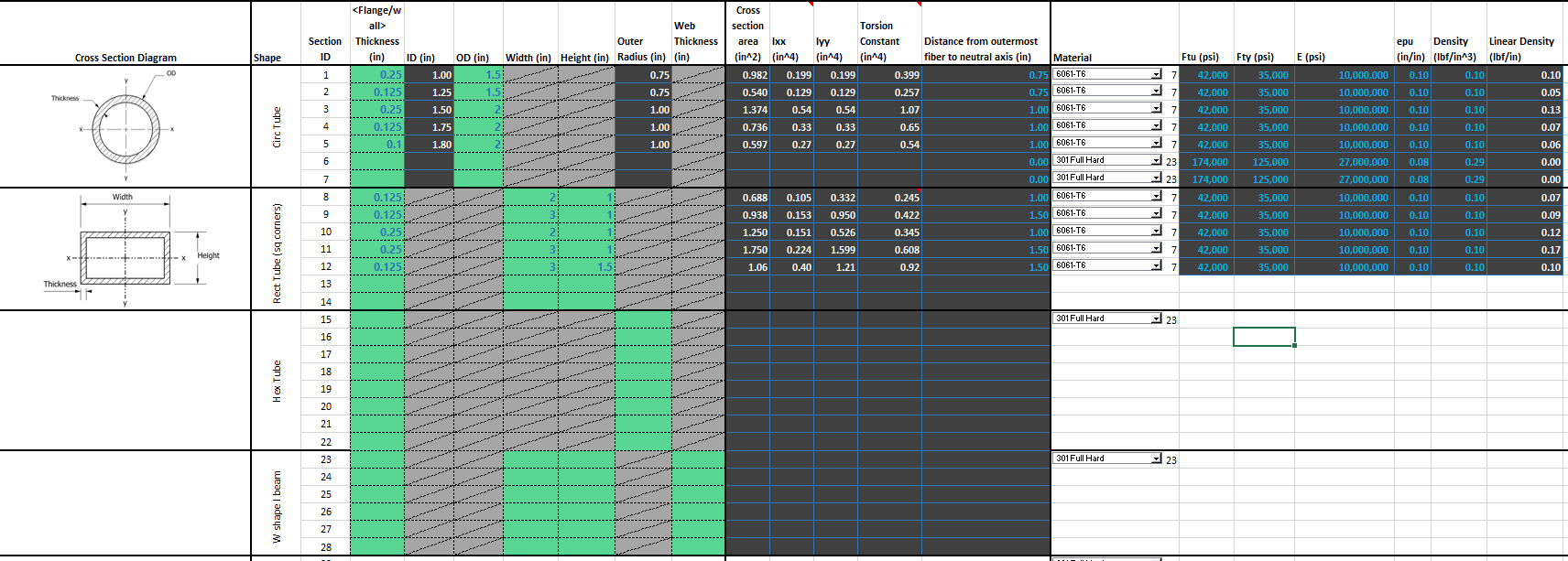
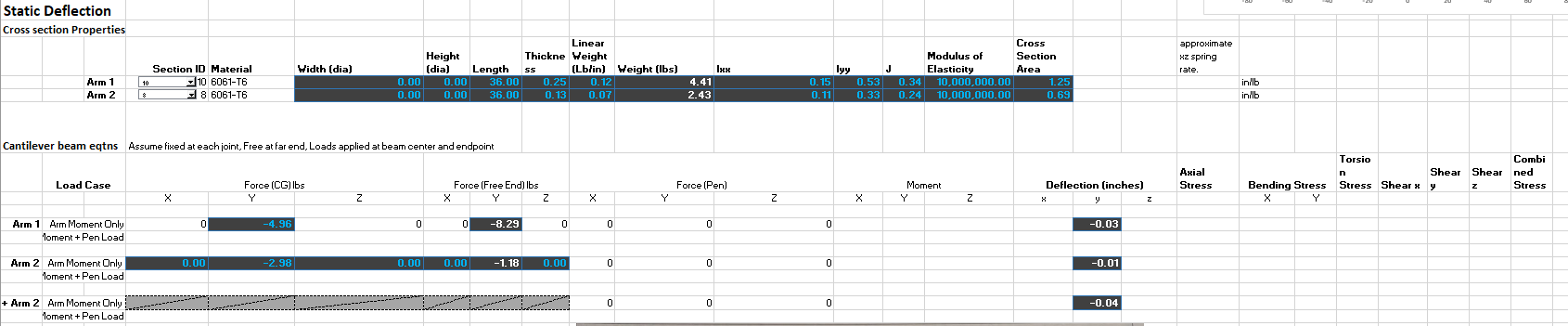
- Arm Material / Cross Section - Prototyping in Aluminium, later considering Carbon Fiber Reinforced Polymer (CFRP)
- Bearings - Considering low cost IGUS slew bearings, may have too much lash, will also look into thin section roller bearings, bushings.
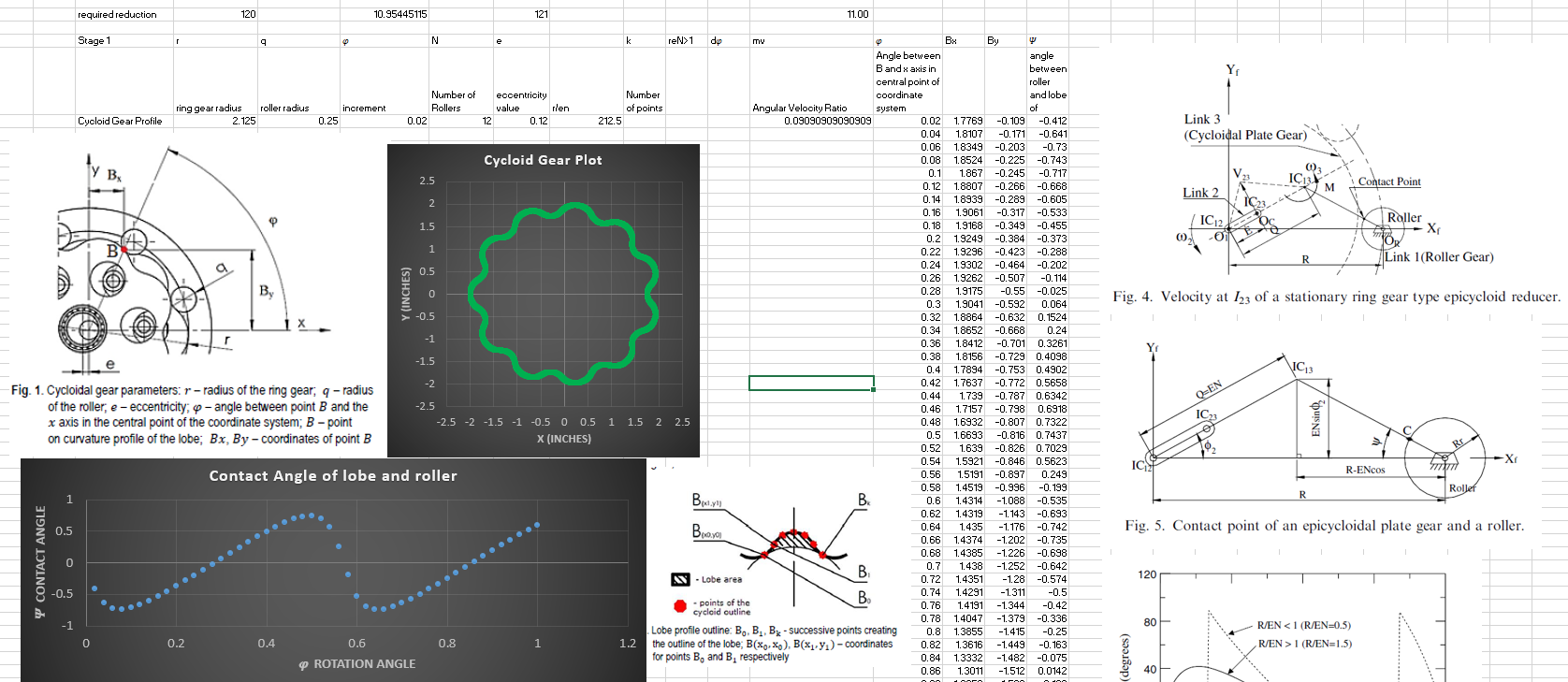
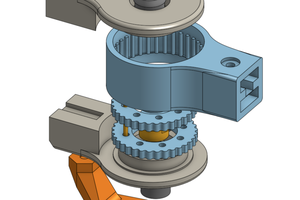
- Gear reduction - Looking at cycloidal drive for low backlash, low cost of manufacture, also considering a differential belt driven system with two input motors per axis if the lash is too high with cycloid.

 Tim Wilkinson
Tim Wilkinson
 Nolan Hergert
Nolan Hergert
 CLo
CLo
 David Brown
David Brown