 Yann Guidon / YGDES
Yann Guidon / YGDES20181108 : project reboot !
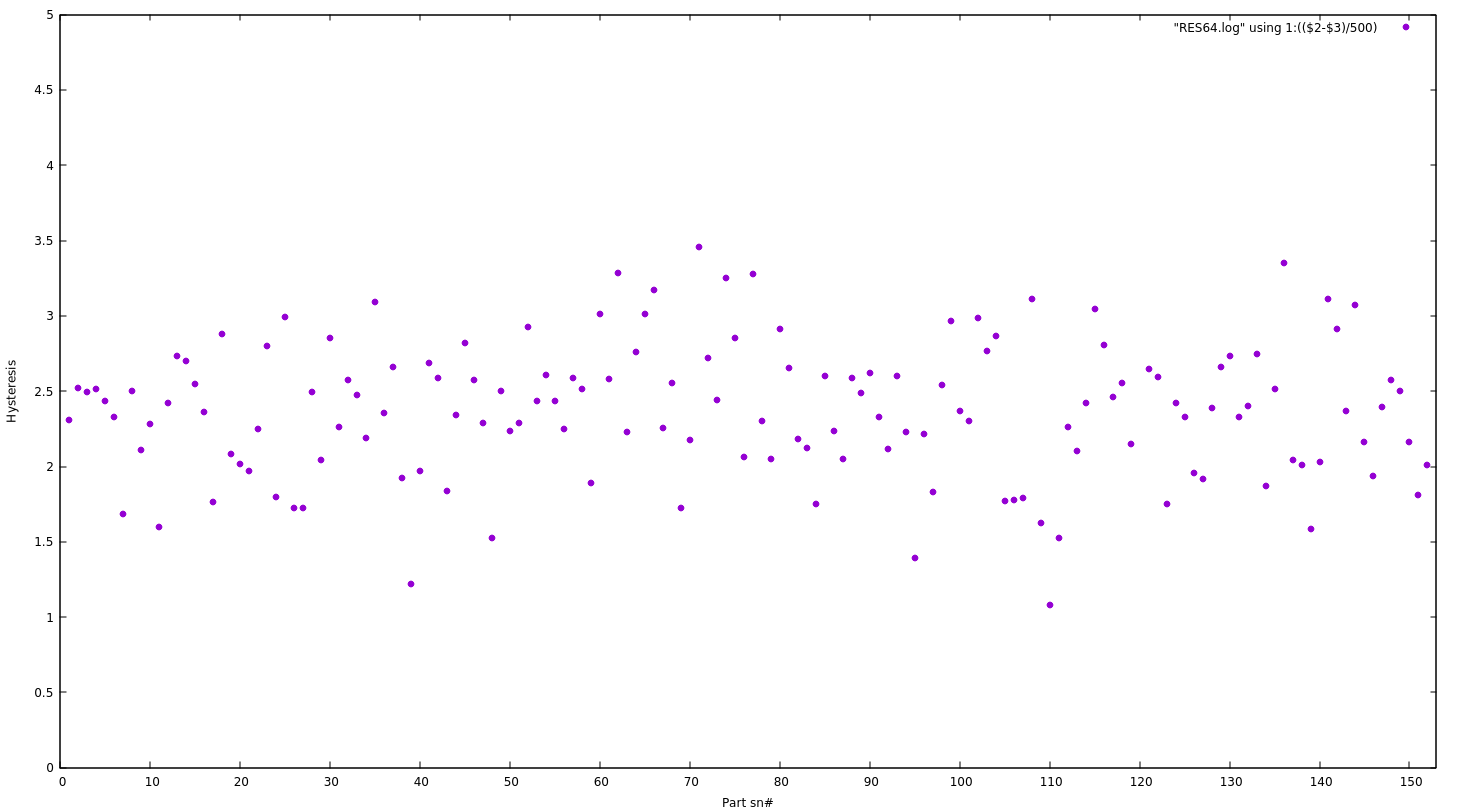
The text below is a bit outdated but the purpose is still the same: test relays. However I only measure the hysteresis voltages now.
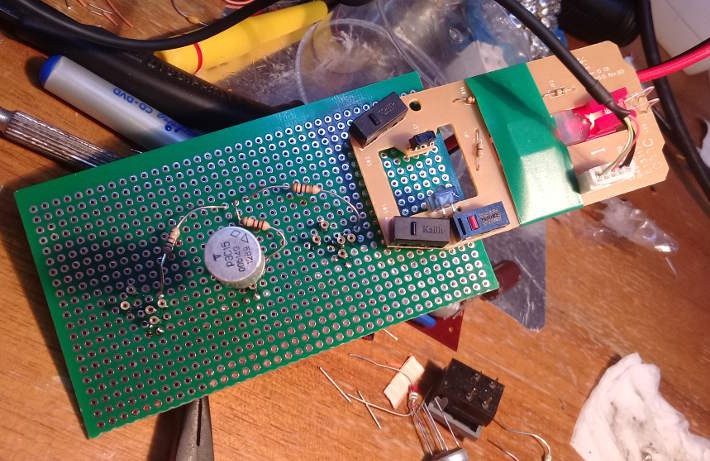
2020-02-04 : The hacked mouse and the SCPI lab PSU are among the many features of this video of the testing procedure :-)
Old version :
The РЭС15 are low-voltage small-signal relays built in Soviet Russia, brought to us by the magic of eBay. I use a certain quantity in #AMBAP: A Modest Bitslice Architecture Proposal and #SPDT16: 16-bits arithmetic unit with relays
In another page (Pre-Biased, or Hysteresis Relay Logic) I gather some measurements and find some outsiders that diverge about 20%. In practice, this can be enough to destabilize the circuit, particularly the latch bits that rely on magnetic hysteresis.
@matseng has designed his own relay timing analyser: #ReTest - Relay timing tester which I'm not able to replicate and doesn't provide me with data I need (such as coil voltages and currents).
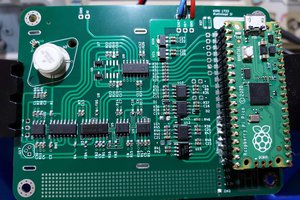
I'm more comfortable with the Raspberry Pi (first generations) and this project is a good opportunity to play with some 74HC parts, precision current generators and other funky analog and digital circuits...
Logs:
1. Sampling
2. SPI Interface
3. Programmable current generator
4. Reboot !
5. Relevant datapoints
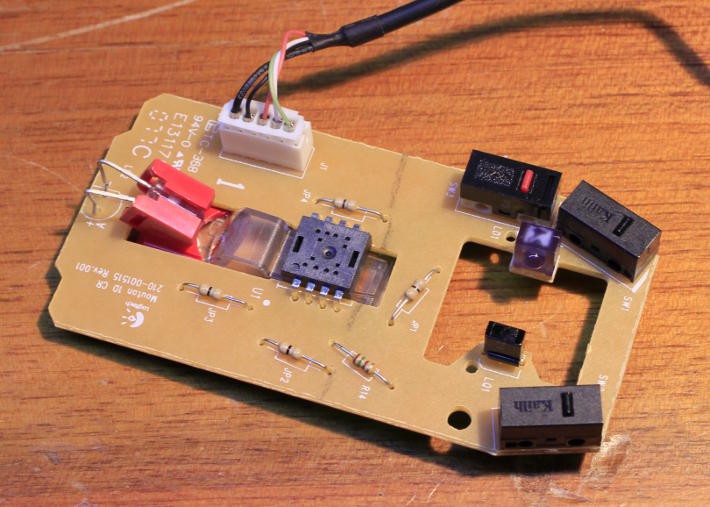
6. Got mouse.
7. And the PSU (bis)
8. First automated ramps
9. Relay labelling
10. Increase the resolution again...
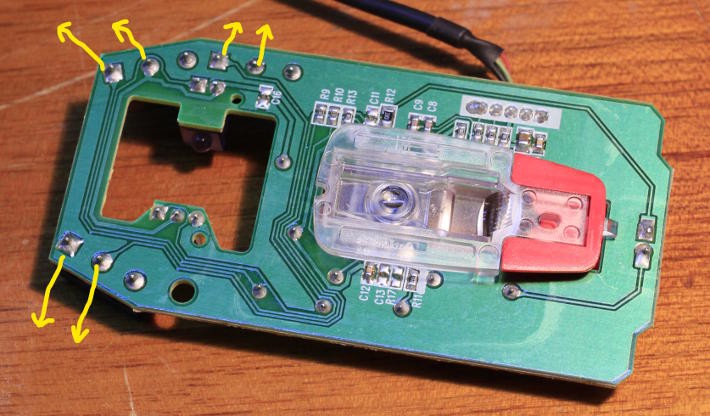
11. Mouse button handling in C
12. Changes for the RES-64
13. No more FP23, use sed !
14. More mouse buttons handling in C
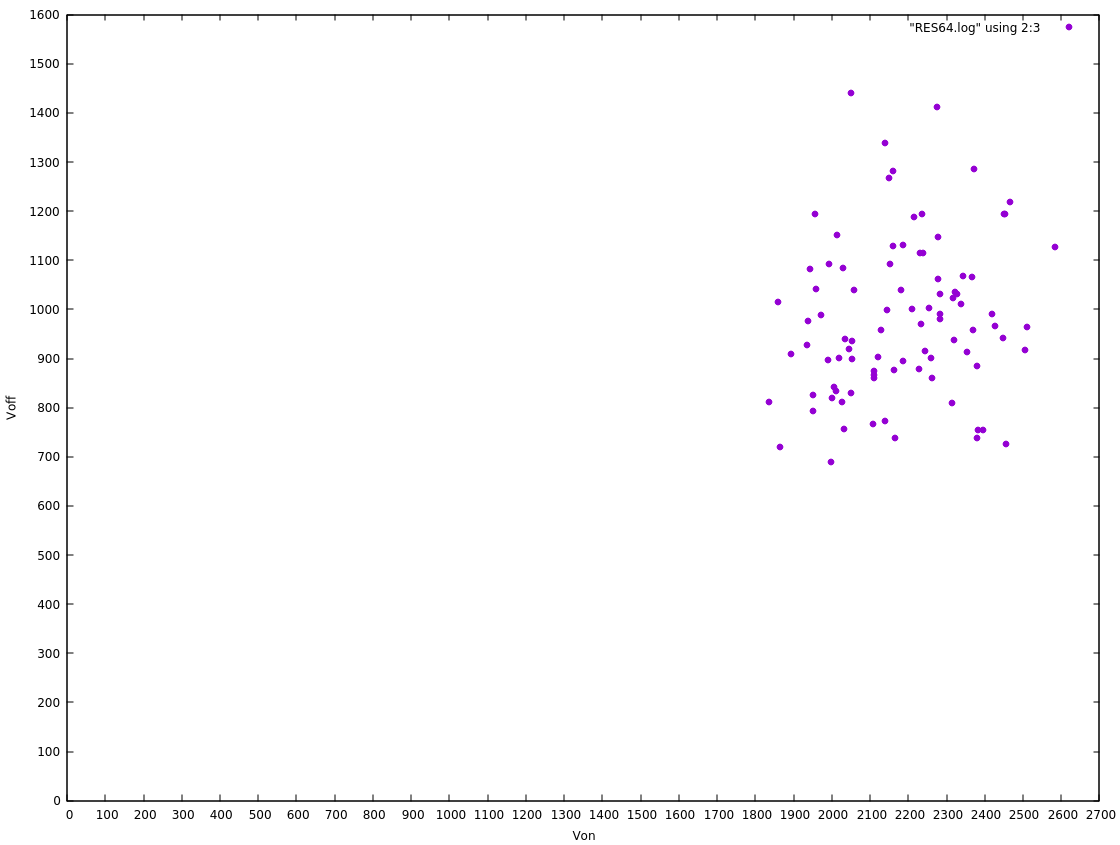
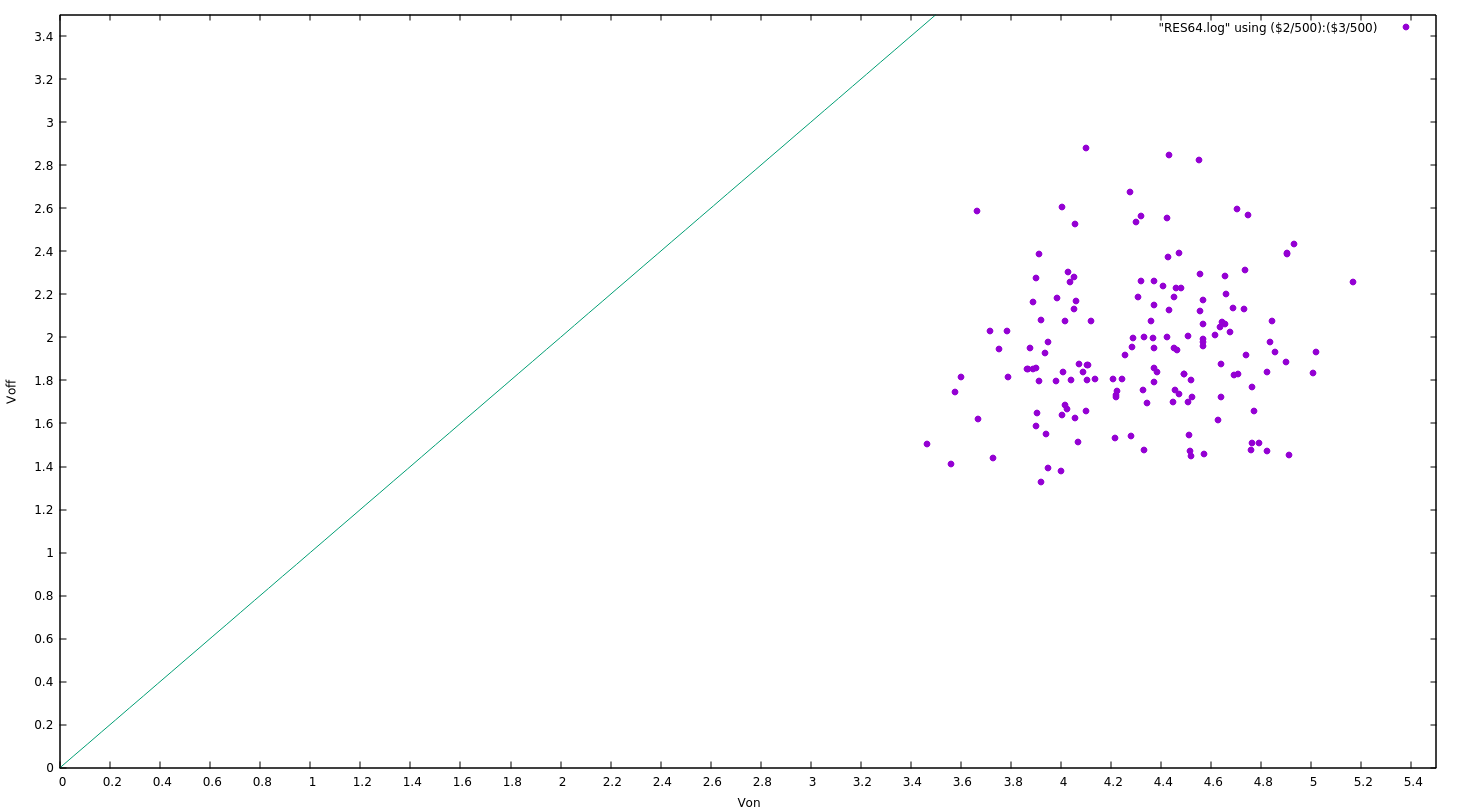
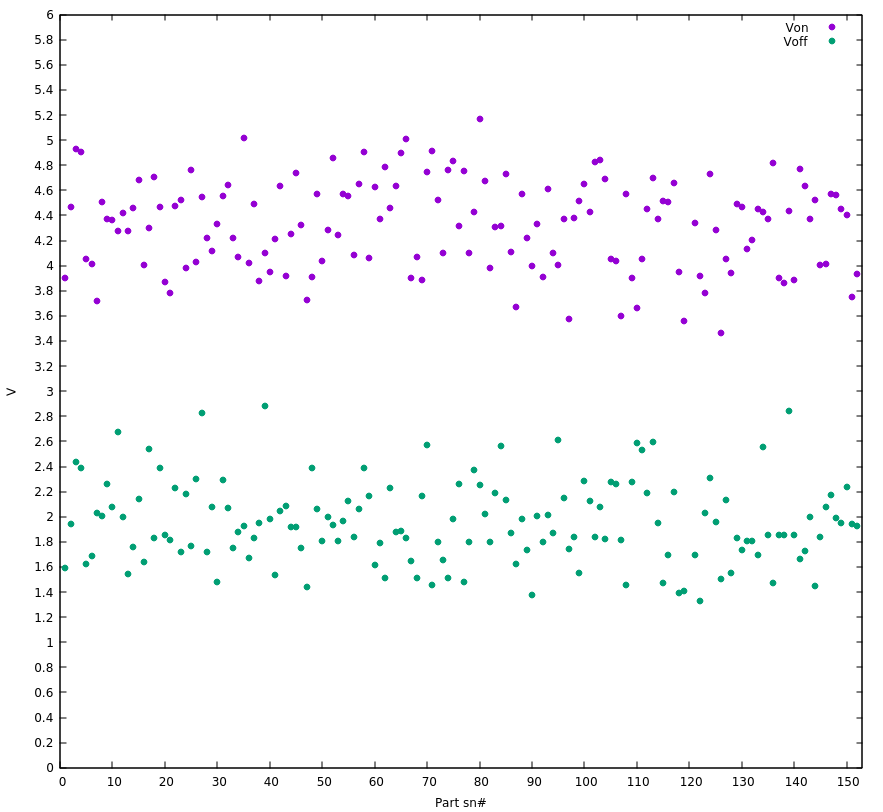
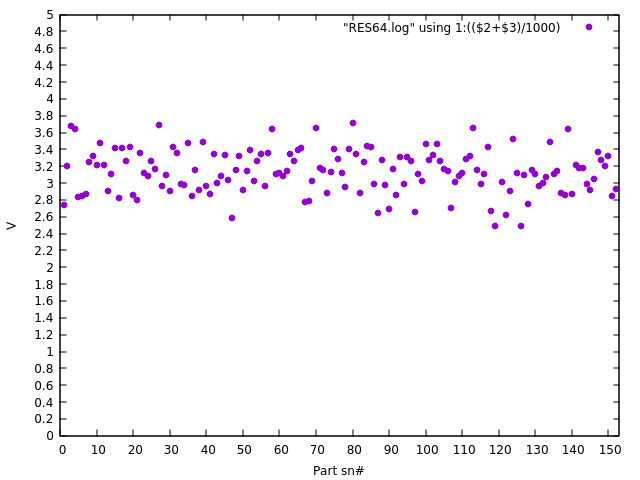
15. First plots
.




 Jithin
Jithin
 NNNI
NNNI
Oh ! a cute little page about the РЭС15 :-D
http://www.155la3.ru/res15.htm