 Kevin M. Ochs
Kevin M. OchsGolem was designed and built honestly to learn and understand ROS (http://ros.org). Having the ability to easily experiment and utilize SLAM systems, Kalman filters, Bayesian loops, path planning at a hobby level was really appealing. With all that available in ROS that allowed me to focus on the robot itself instead of spending weeks writing that code. It's been a great journey and I highly recommend diving into ROS if you have been interested.
Below is body auto leveling test. Listen with sound up to hear the speech error reporting.
Below is a simple test of the 3D and 2D mapping using RTAB-Map a RGB-D Graph SLAM approach based on a global Bayesian loop closure detector.
Code is available on my github. https://github.com/KevinOchs/hexapod_ros
 Jack Qiao
Jack Qiao
 Norbert Heinz
Norbert Heinz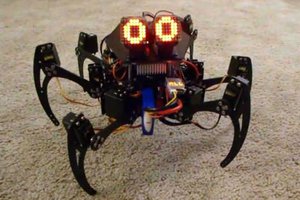
 Duane Degn
Duane Degn
 Omri Ben-bassat
Omri Ben-bassat