 Ahead
AheadThe current stage of the project:
Done:
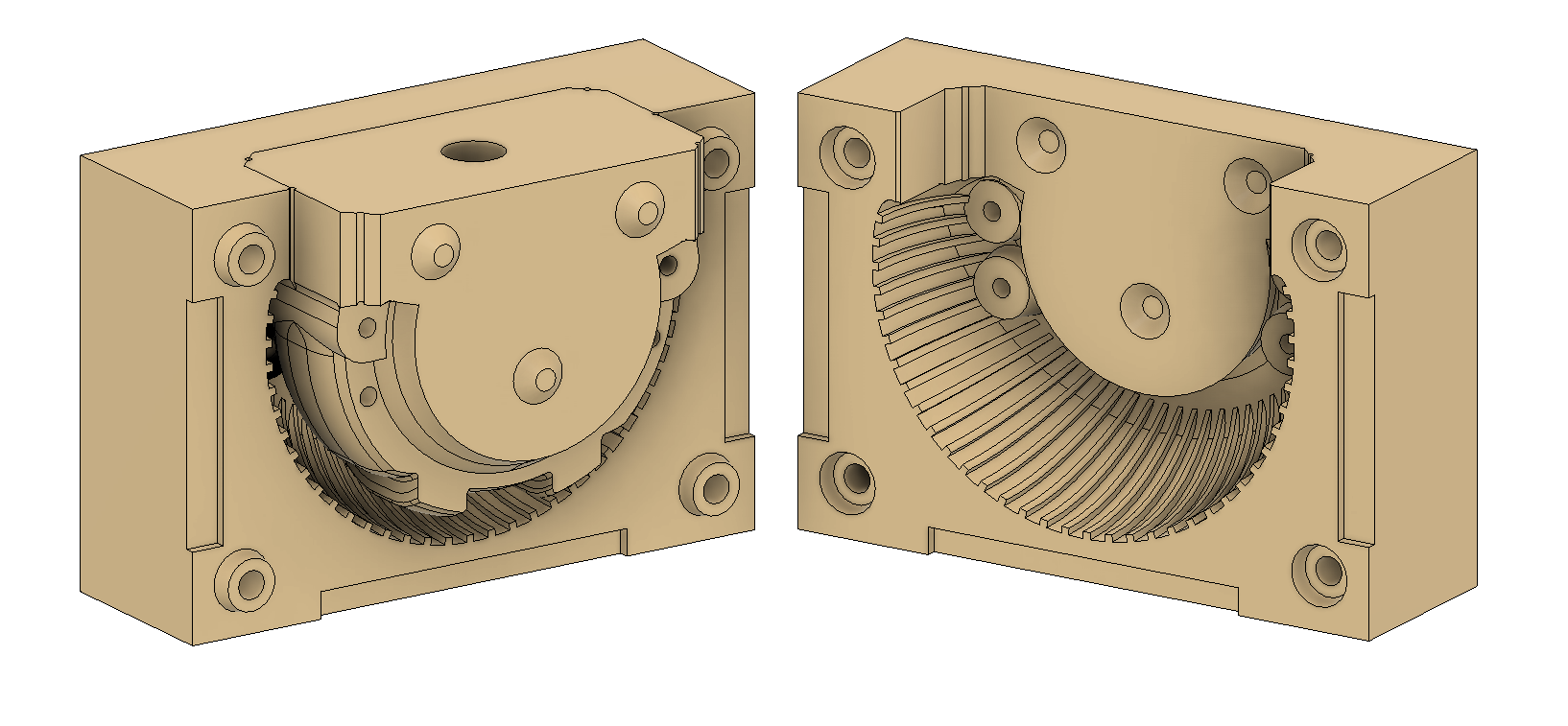
- Design a single capstan reducer and build a test stand for it - perform tests and improvements.
- Design and build a 2Dof leg - with the knee and hip joint.
- Write a python script for communication with the moteus r4.5 controllers over the USB-CAN_FD adapter
- Solve inverse kinematics and scripts for jumping and various other demonstrations.
- Perform testing on the 2Dof leg - continuous jumping for 1h - inspect, iterate.
- Design and build a 3Dof leg - adding the ab/ad joint.
- Perform testing on the 3 Dof leg - continuous jumping for 1h between randomly chosen points.
- Make design corrections based on the test and retest. Also perform mass reduction improvements.
- Design the chassis.
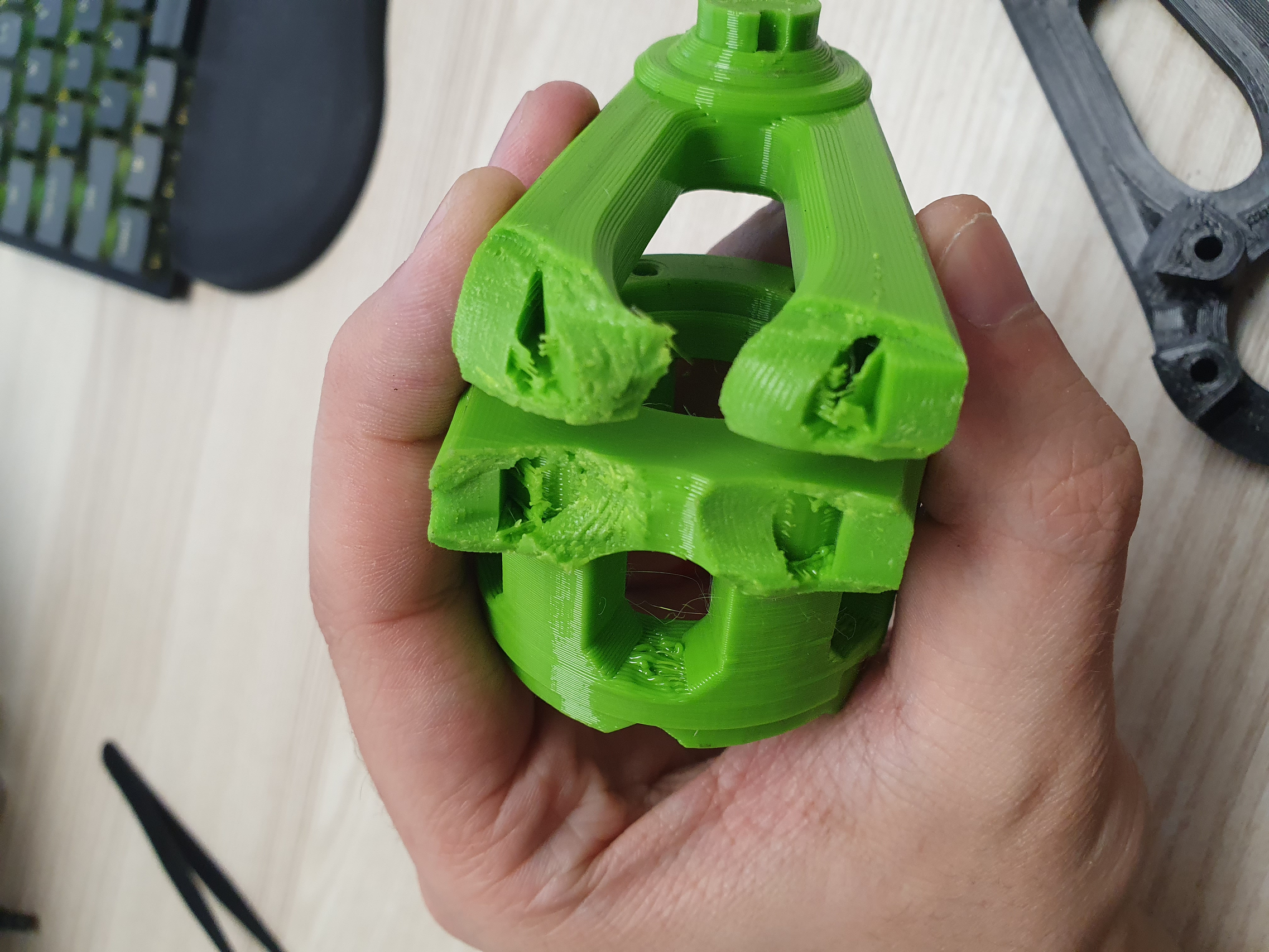
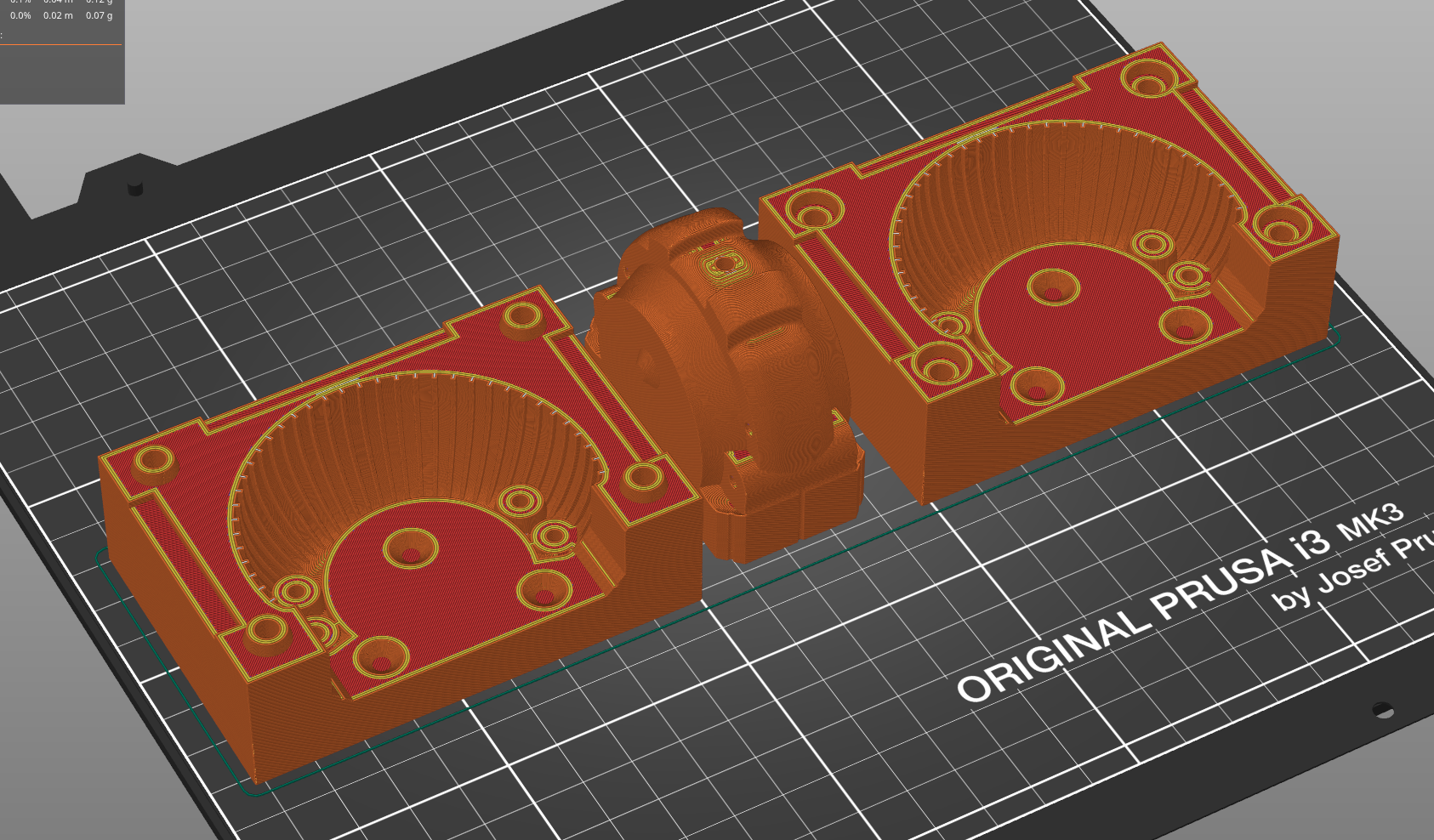
- Print a mock-up of the chassis before ordering the "real thing" in FR4 to verify the design .
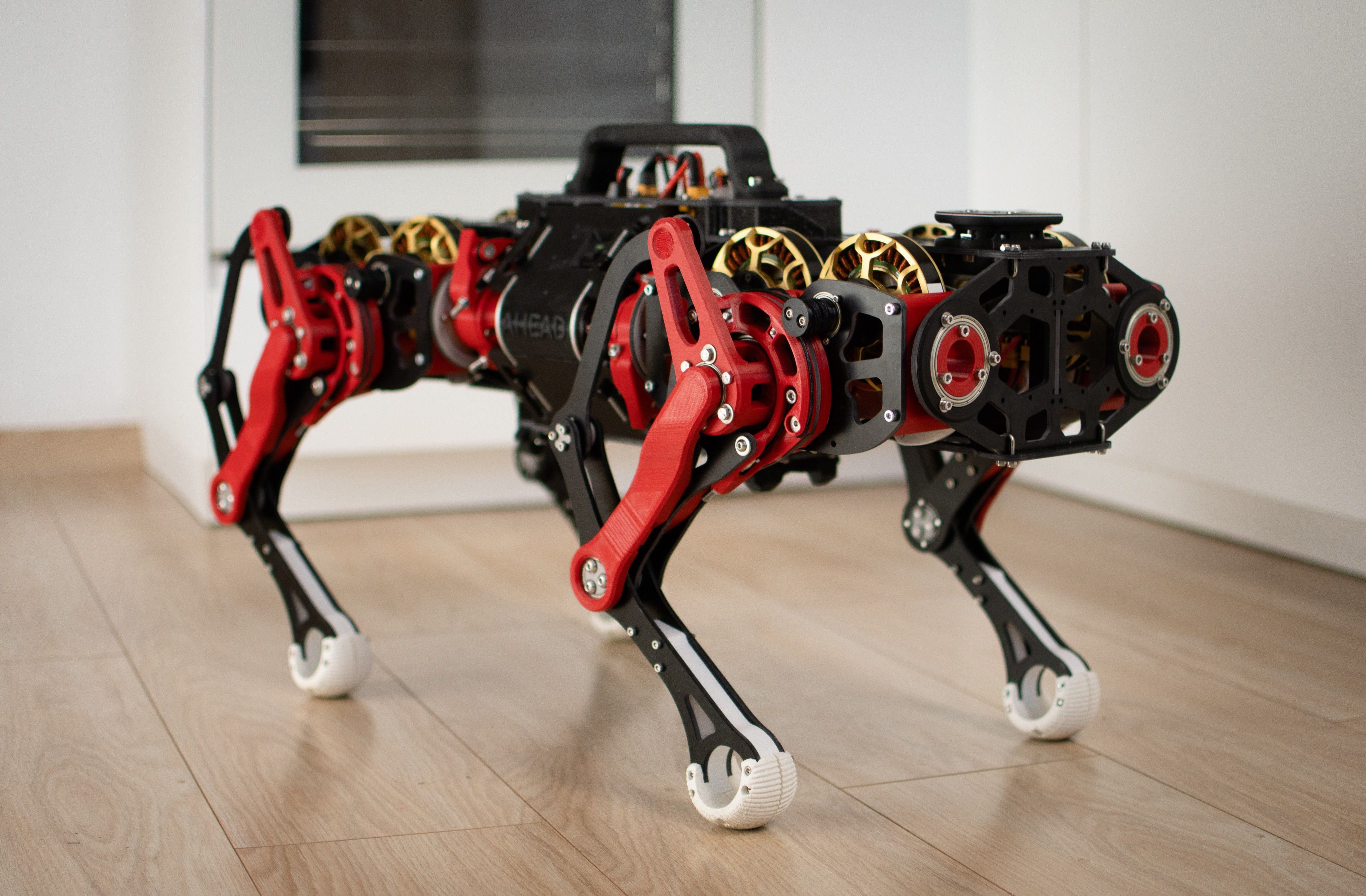
- Get all FR4 Parts and assemble The First Stanley.
- Lay down cables.
- Get the internal CAN communication working.
- Get the Xbox360 Controller working with RPi4B.
- Solve inverse body kinematics, make a demo.
- Create a parametric step trajectory generator, make Stanley walk for the first time.
- Tune the walking algorithm.
- Add jumping functionality.
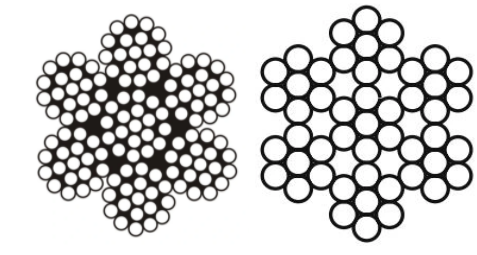
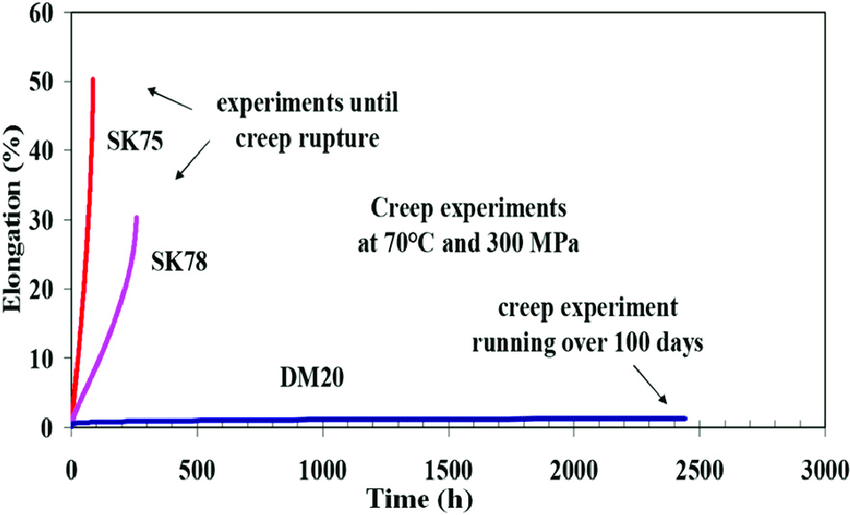
- Test different types of cables, choose the best one.
- Make assembly improvements.
- Create prototype payloads for JetsonNX and Intel cameras.
- Create side covers that better protect the insides of Stanley
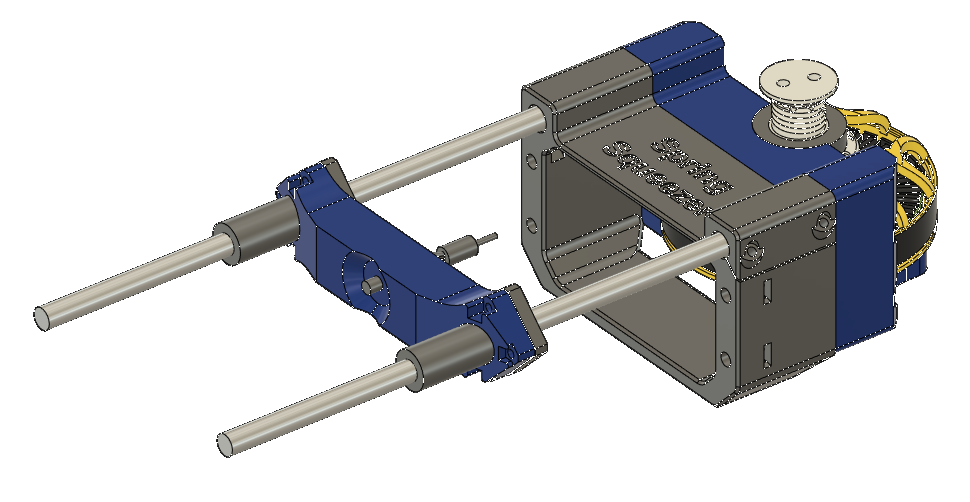
- Redesign cable tension system for easier assembly.
- Create assembly tools.
To do:
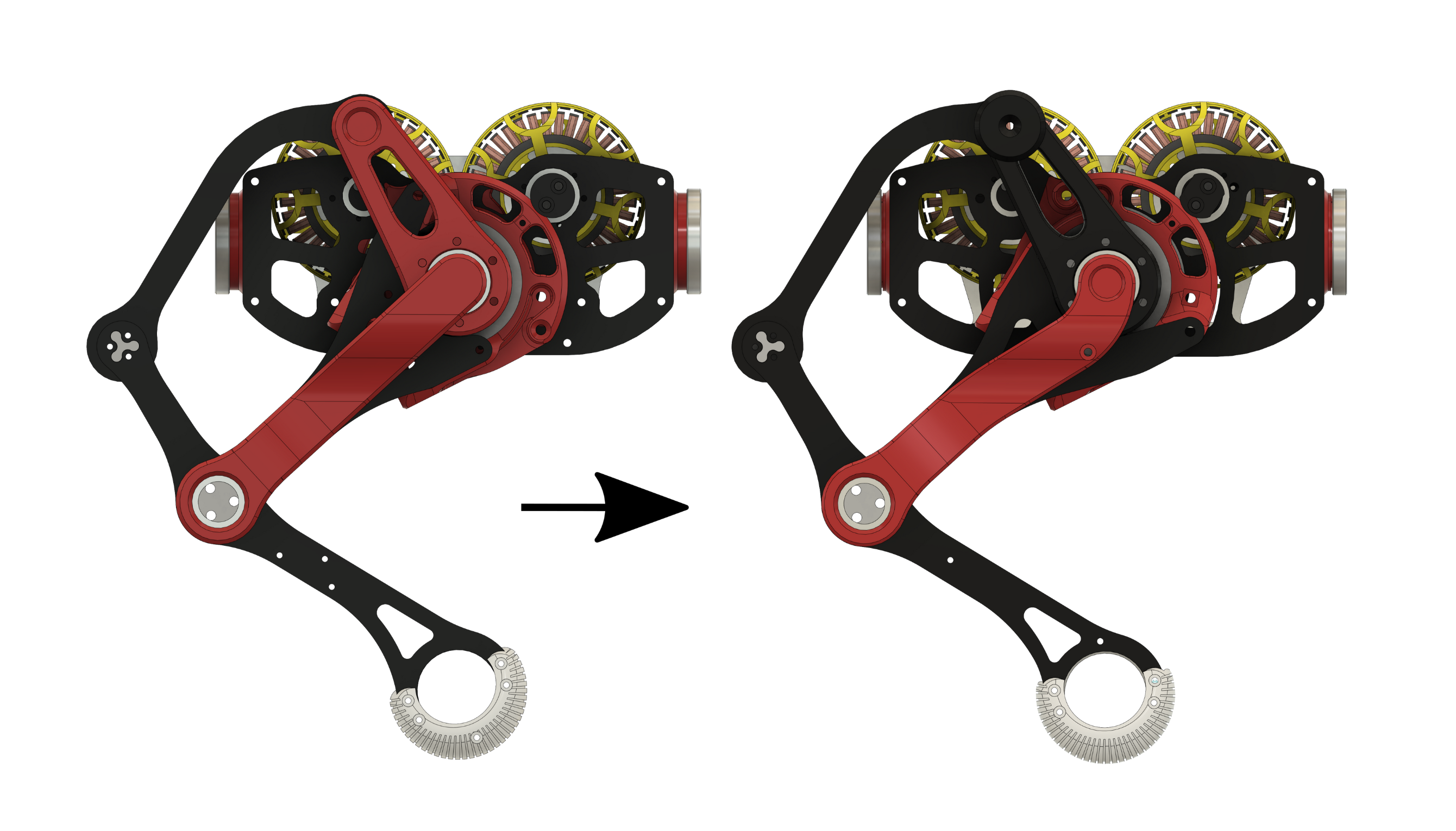
- Increase reduction ratio to 1:8.
- Make Stanley’s legs longer.
- Make the AbAd actuator more compact.
- Introduce new, lighter motors (probably).
- Make more space inside Stanley for compute and batteries.
- Further assembly improvements.
- Reduce the number of types of screws used in the design
- Develop Mobile Application to control .Stanley missions.
- Create SDF for simulations.
- ...






























 ThunderSqueak
ThunderSqueak
 peter jansen
peter jansen
 Andrea Piccinno
Andrea Piccinno
 Maximiliano Palay
Maximiliano Palay
are you still planning to release the STL and CAD files?