 JP Gleyzes
JP GleyzesThe idea
Le "100e Singe" is a Third Place, in vicinity of Toulouse, half-farm half-office, combined with an agricultural incubator that welcomes and experiments with new forms of work: cooperatives, collaborative, with meaning and impact on major societal issues.

They built a "portable chicken coop" and asked me if I could design an automatic door... The Kokot project was born!

After a few brainstorming sessions we came to the following key specifications:
- the door should open/close phased with the sunrise and sunset hours. This seems to be better than classical light sensor. These sensors are prone to "false detection" in case of bad weather (false night) or when illuminated by car headlights (false daylight).
- the system should be self powered (no mains into the fields)
- it should use a rechargeable battery and should be equiped with a solar panel
- the door should be "guillotine style" for compactness and efficiency (see picture above on right wall)
- the door should be automatic but should also offer manual "open close" capabilities
- the whole system should cost less than 40€
Optionnal specifications
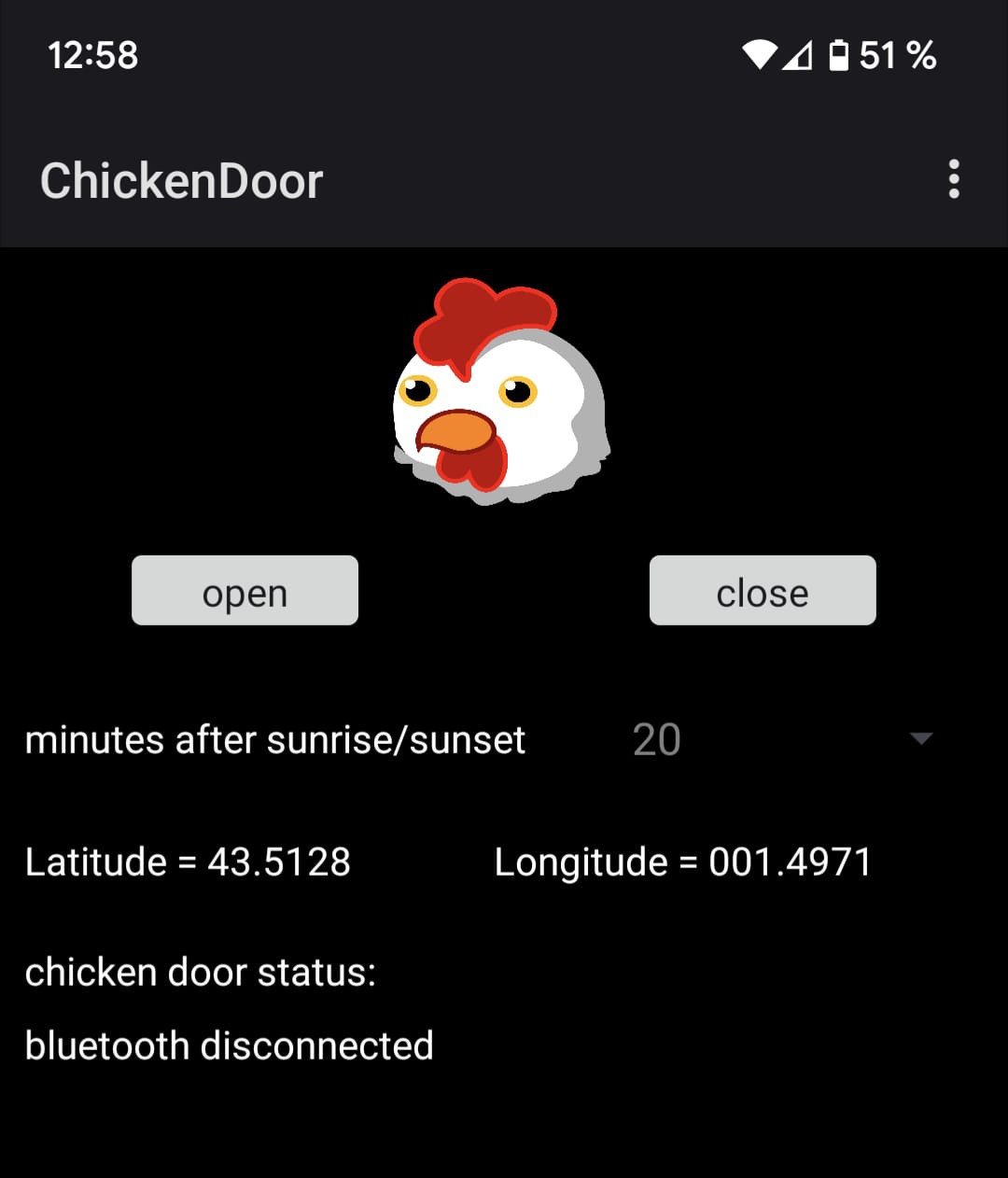
- Kokot should be "smart". That is connected to internet and/or your smartphone
- kokot should monitor temperature and humidity into the coop
And of course kokot must be energy efficient to avoid draining the battery and to keep the costs as low as possible (smallest battery, smallest charger, smallest solar panel, smallest motor...)
Video of Kokot running
Here is the door opening: exciting video! But project is working.
And please note that the music is : If I Had a Chicken – Kevin MacLeod

Motor selection
Regarding the motor's technology we had basically two possible choices:
- Stepper motor
- DC motor
A stepper motor would have been a simple device to drive. However it suffers from a major drawback : if not energized the motor would loose its torque and the door may fall down only with its own weight.
Furthermore, these motors do not have a lot of torque and if they loose steps, nobody would know it as they are driven in fully open loop mode.
On the other hand a DC motor, when equiped with a gear box, will have much more torque, could be driven at low speed and will not reverse when not energized (provided that the gear box has sufficient reduction ratio to have "friction").
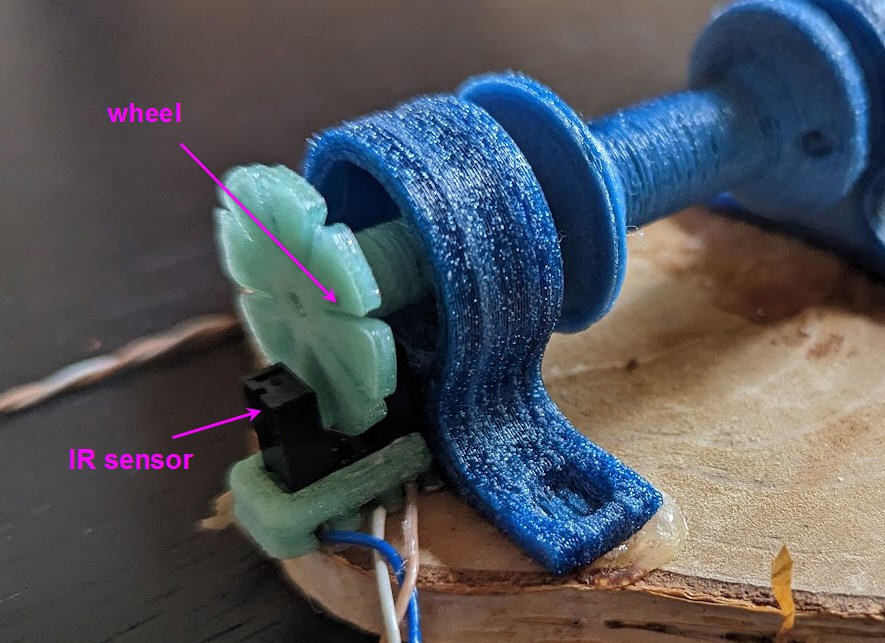
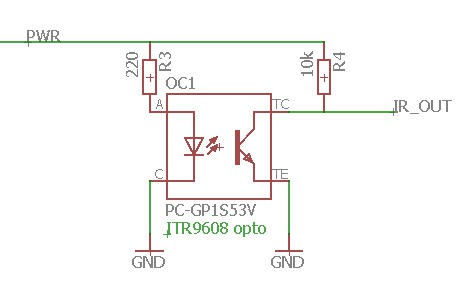
But these motors are not driven precisely ... unless you add an encoder on the shaft!
This being said we have choosen a small DC motor able to run at a very low 10 to 15 RPM speed. That is 0.25 turn per second (max speed) or 1 turn every 4s.

As you can see it is equiped with a gear box allowing to increase the torque but also to prevent moving when not energized.
This motor is really tiny (the shaft has a 4mm diameter)
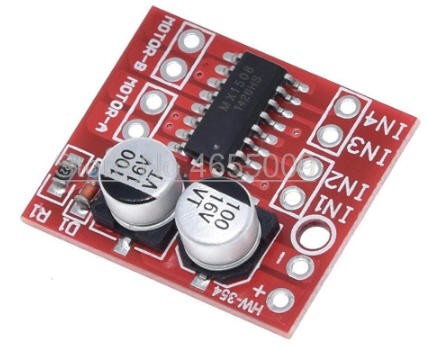
It will be driven with a little DC motor driver
The specifications of this motor are not "impressive":
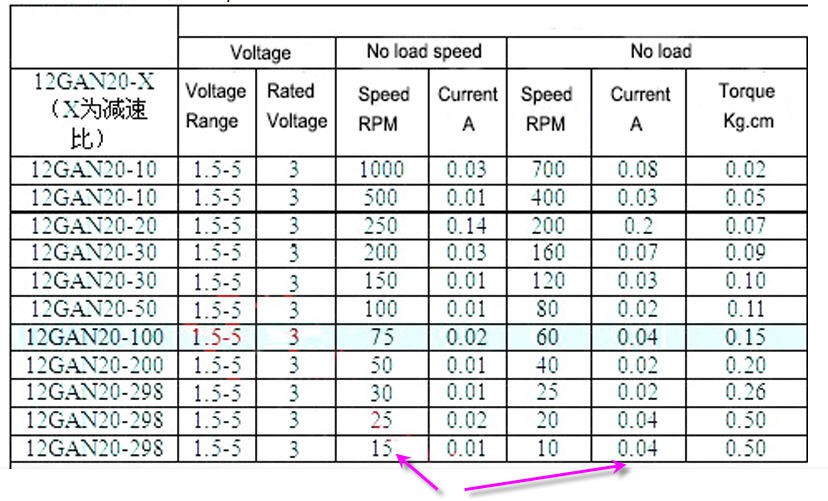
As you can see it is a "low energy motor" which will drain 40mA on a 3V battery. It is said to have a torque of 500g.cm. We will see later the reallity.
Selecting this small motor gives the following additionnal specifications:
- the battery must be a 3.3V one. Which is fine as I wanted the "smallest" one. A single Li-ion 18650 cell should be enough.
- the apparent weight of the door should be in the range 200 to 300g to avoid stalling the motor.
Finally, these motors are incredibly cheap : less than 5USD...
This motor has been qualified under "load". These tests being successfully passed we could go on designing the electronics.
Energy for Kokot
I wanted to power the door with a single 18650 Li-ion cell.
Knowing that the motor eats 40mA when running and that it should run twice per day during max 30s, we can easily compute the power requirements for such a battery.
To get a worst case I did measure the current while holding the motor shaft. It indeed rized up to 60mA at the maximum torque before stalling and when powered...
Read more »







 Adrian Prinz
Adrian Prinz
 Sebastian Foerster
Sebastian Foerster

 Anshul Sanamvenkata
Anshul Sanamvenkata
Hi, thanks for sharing your wonderful project !
I would like to make your Kokot chicken coop door controller, but I can't find the .apk file to install the App. I think, it's not in the .zip-file. Is it possible to upload it ? Thanks in advance ! Peter.