 deʃhipu
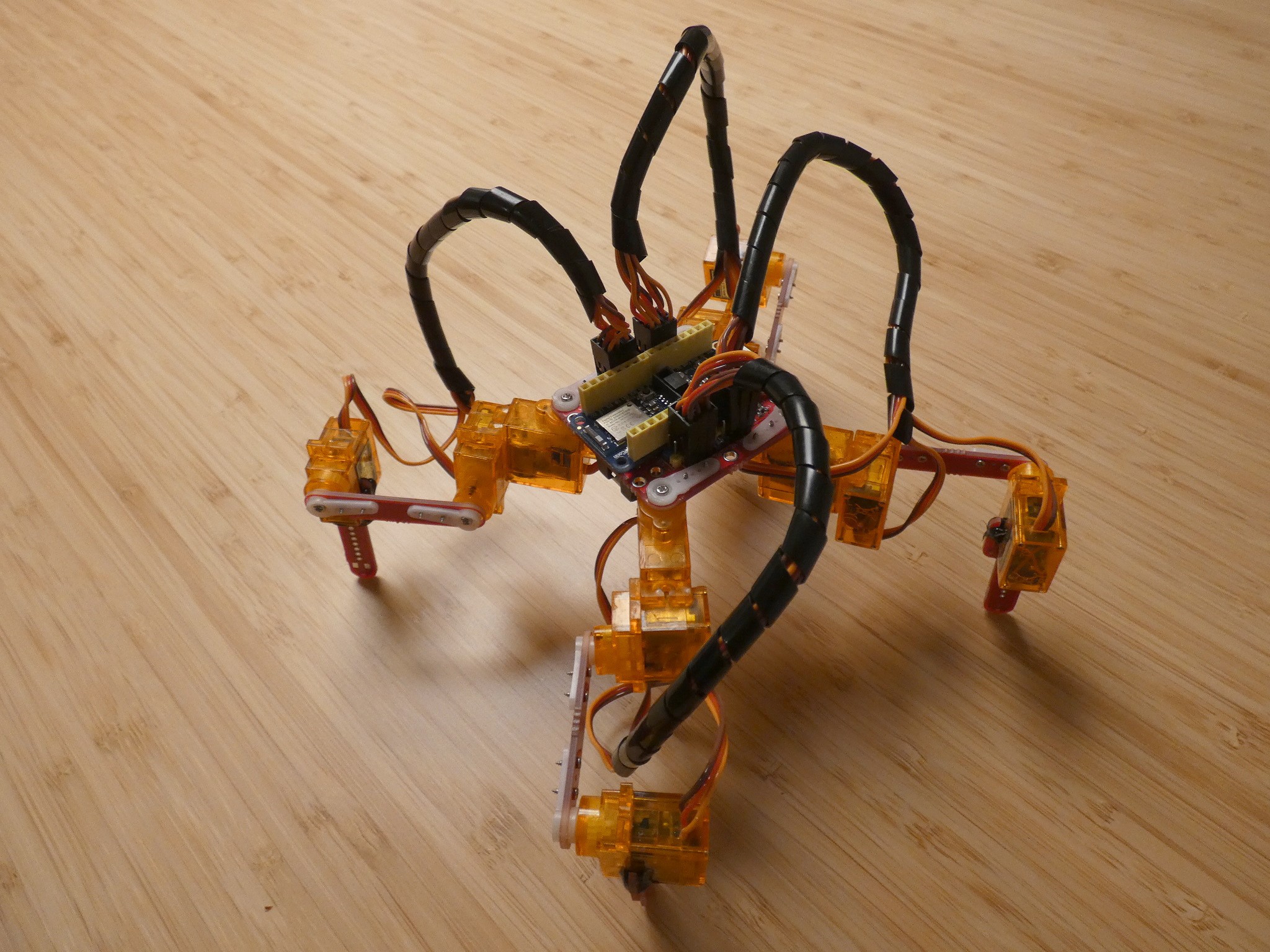
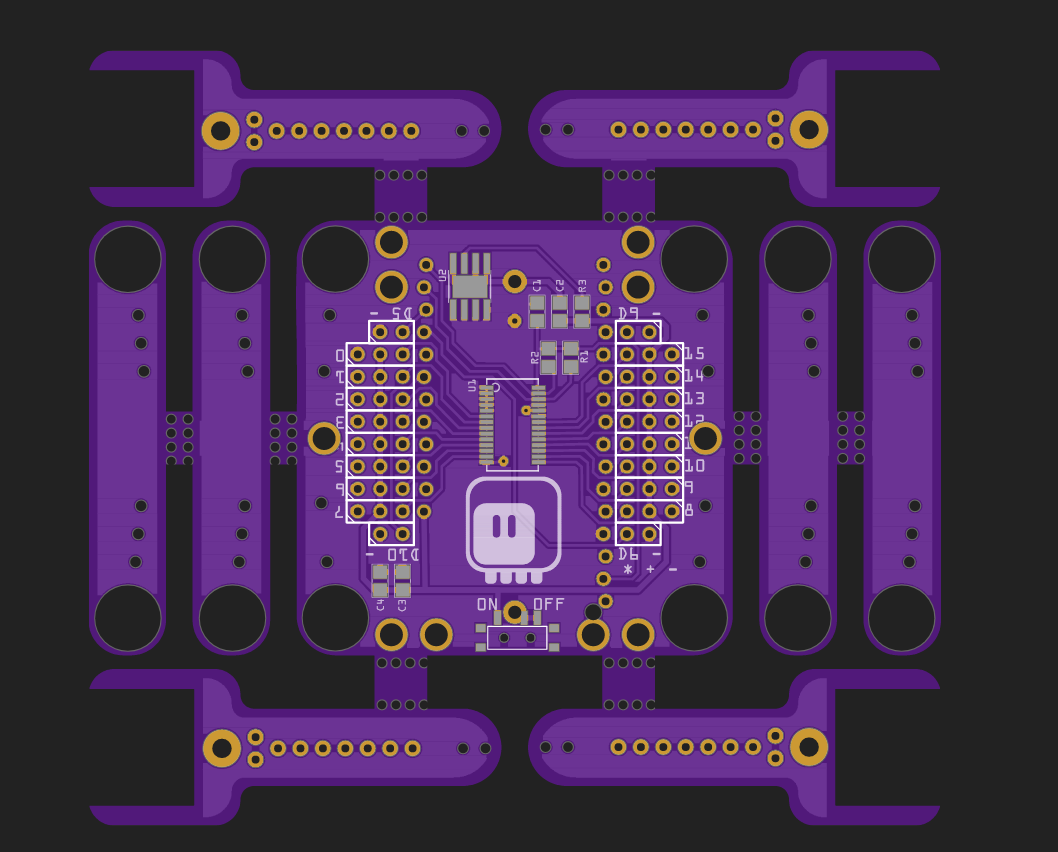
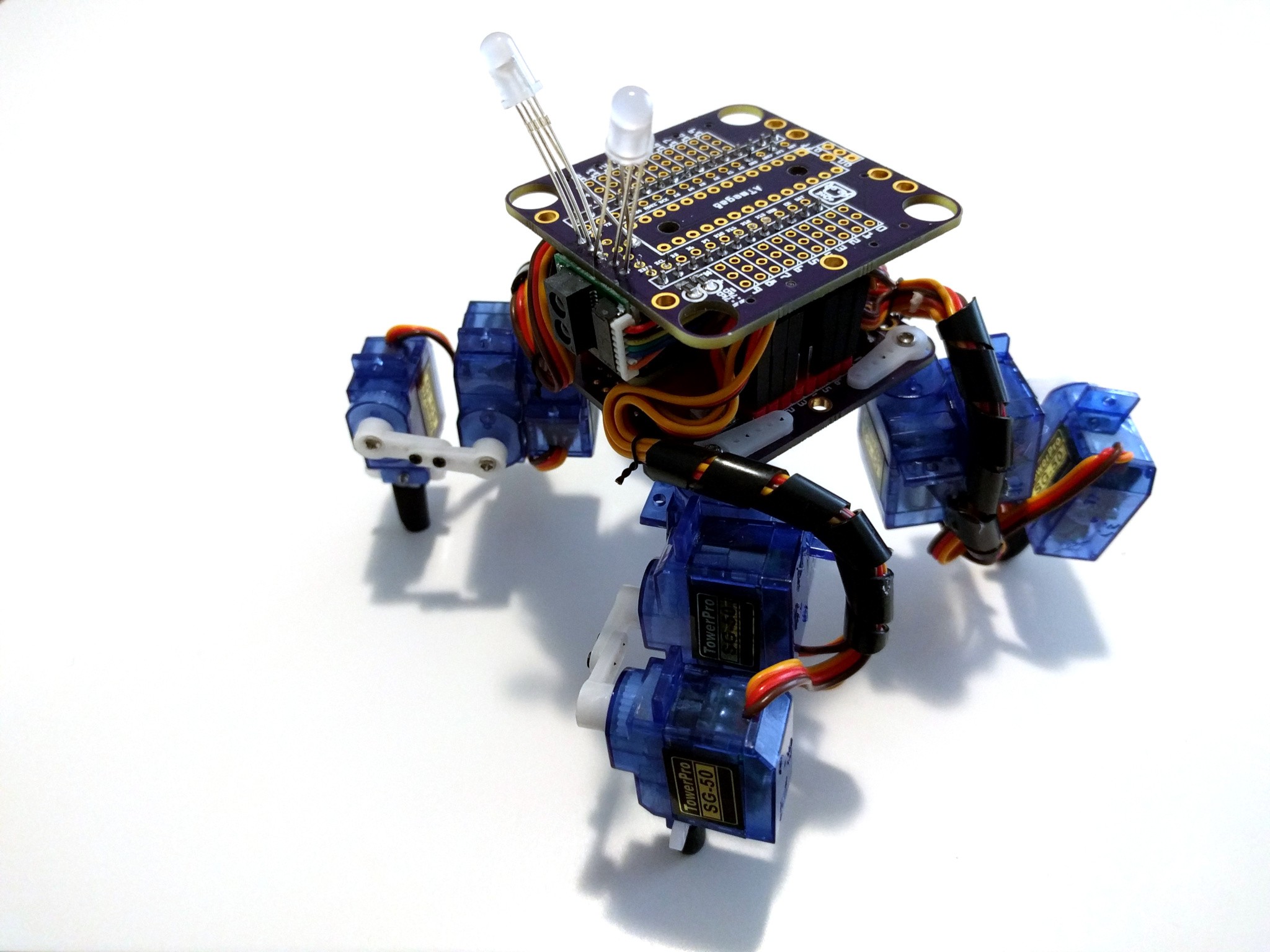
deʃhipuThis is the successor of the #Tote robot, and its small family (#Tote Zero, #Tote HaD, #D1 Mini Tote). Tote itself was focused mostly on affordability, ease of assembly and extensibility — and I think that it achieved those goals relatively well. However, it turns out that physically building the robot and programming the first gait is just the tip of the iceberg. We need something a little more powerful than a simple Arduino, and something much easier to program and test. The SpiderWing builds on top of Tote, but focuses more on the ease of programming and reliability. It uses slightly more expensive parts (Adafruit Feather boards, SG92R servos) to be more reliable and easier to reproduce exactly (whereas every Tote is slightly different from all the others). It will also use advanced sensors, such as the time-of-flight distance sensors or the IMU sensors with built-in fusion algorithms, in order to get better and more consistent results.
Of course the ultimate goal remains the same — to bring walking robots into our homes and hopefully crowd-source their development, so that they become reliable and cheap enough to be generally useful.





Did to try to integrate the wire in this spider project? I want to test it for Spider Solitaire game that hosted on Live Website.