 Michael Doody
Michael DoodyThis completely open source project breaks down into four main parts.
1) Part 1 -Seismic sensor
From Wikipedia, the free encyclopedia -
"In geology and other related disciplines, seismic noise is a generic name for a relatively persistent vibration of the ground, due to a multitude of causes, that is a non-interpretable or unwanted component of signals recorded by seismometers."
The role of the hacker here might be to challenge that bit of conventional wisdom. Let's see where it goes if we put the magnifying glass on seismic noise instead of intentionally ignoring it.
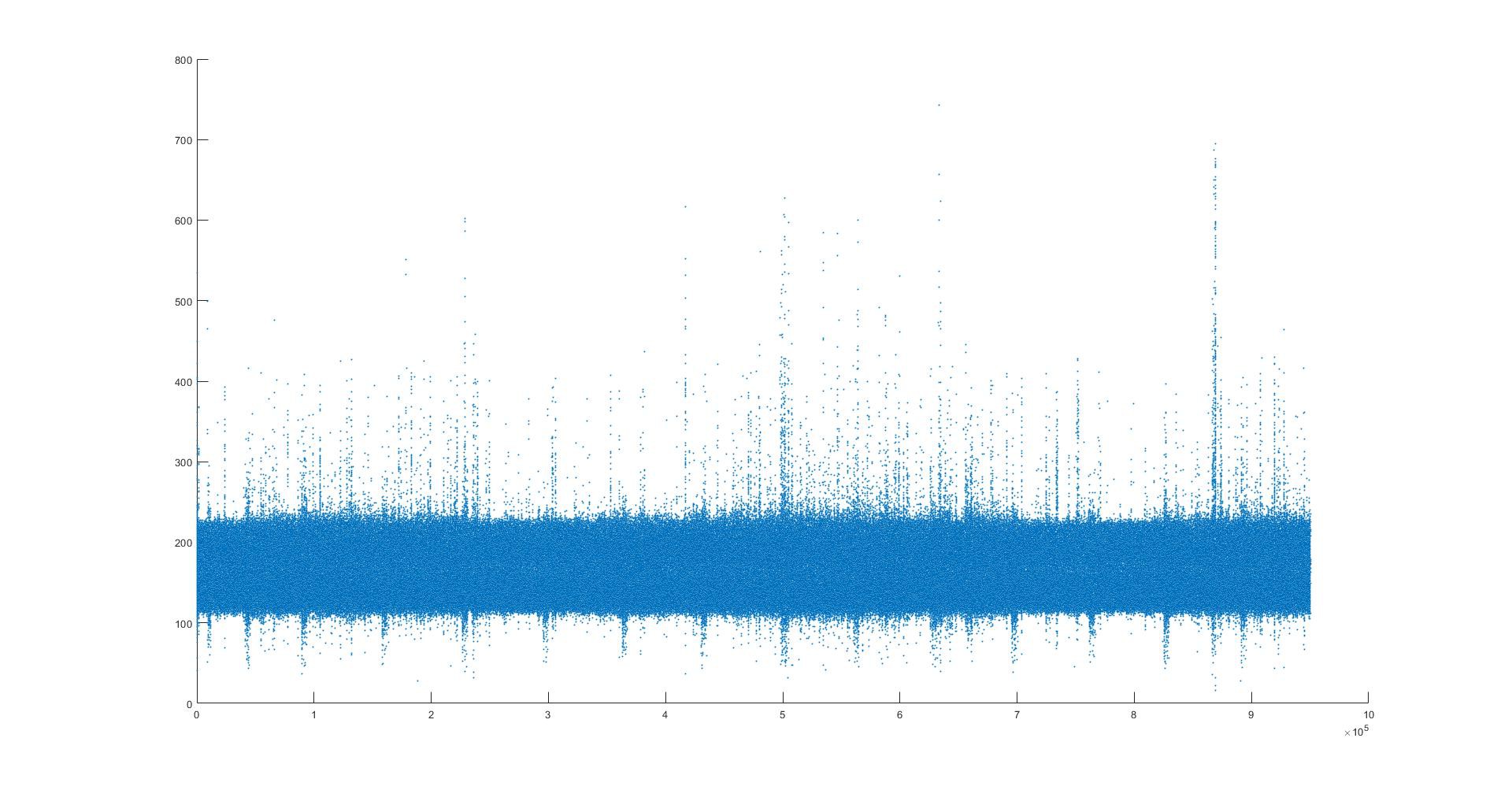
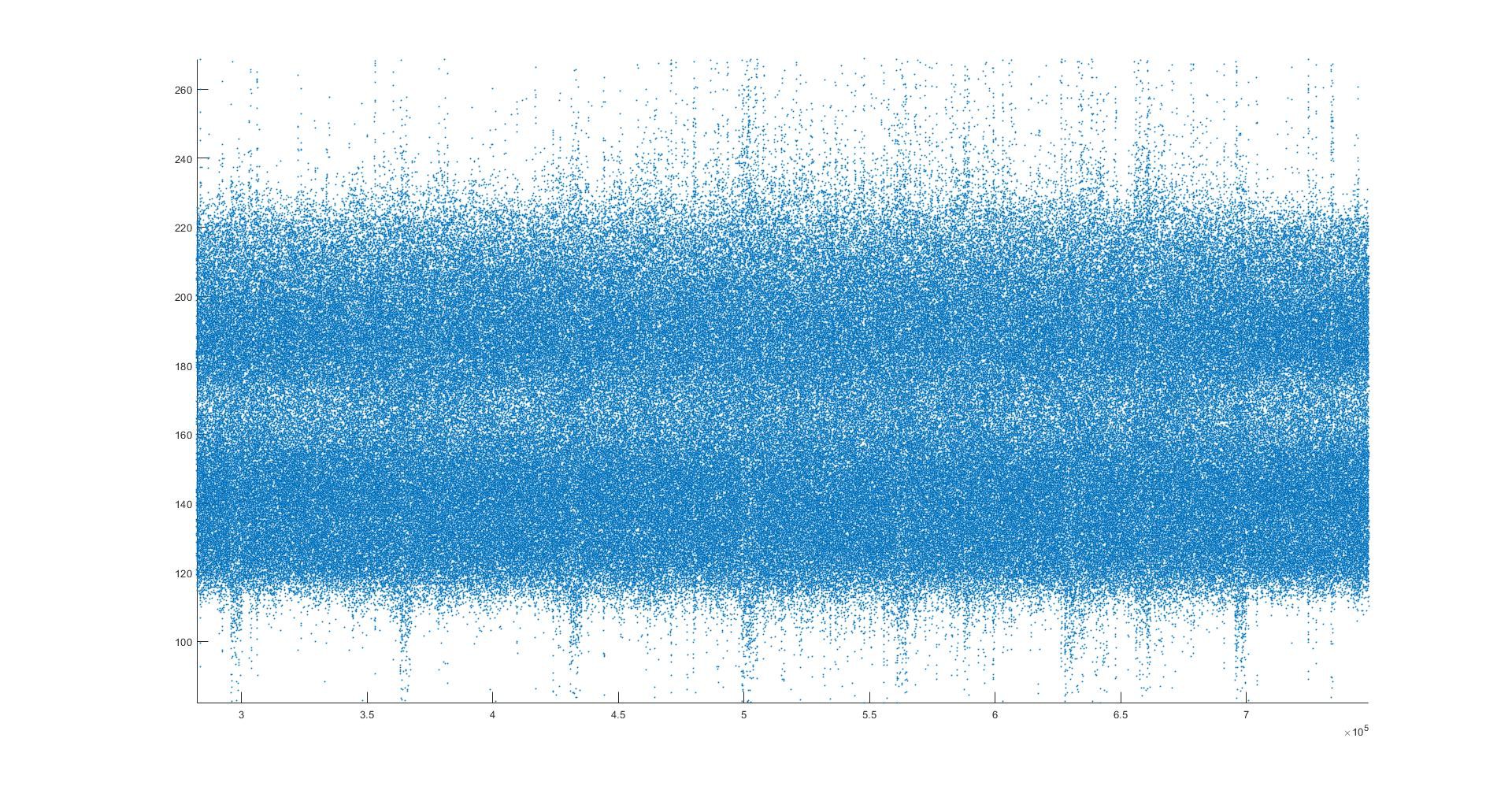
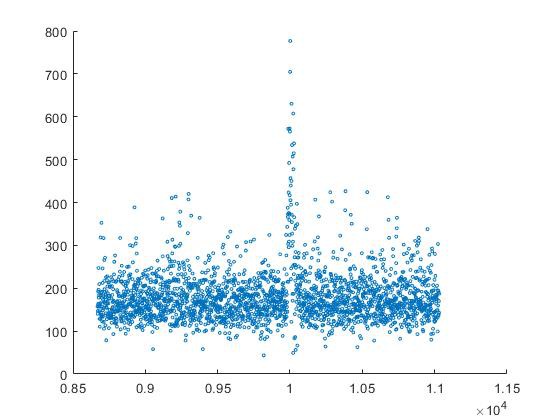
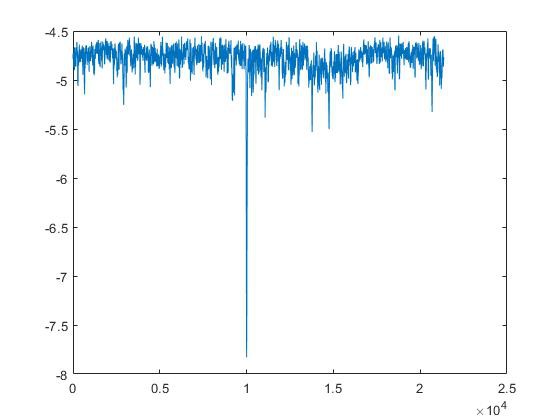
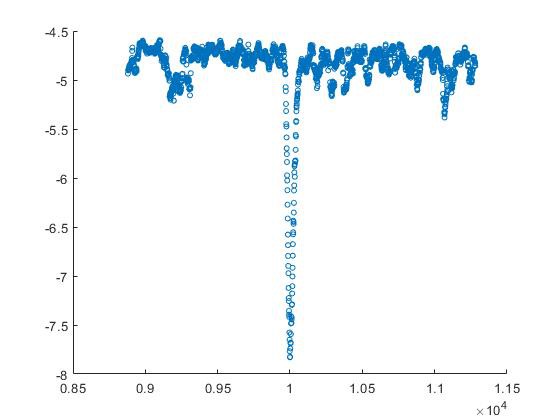
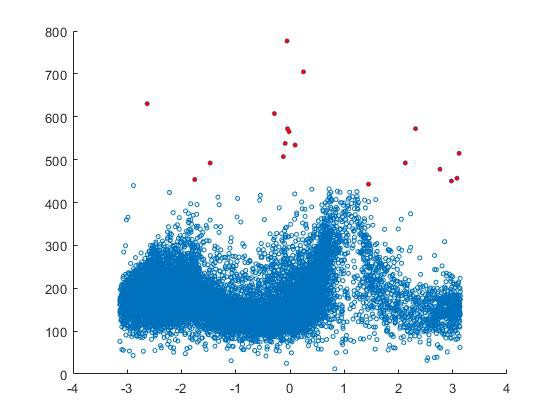
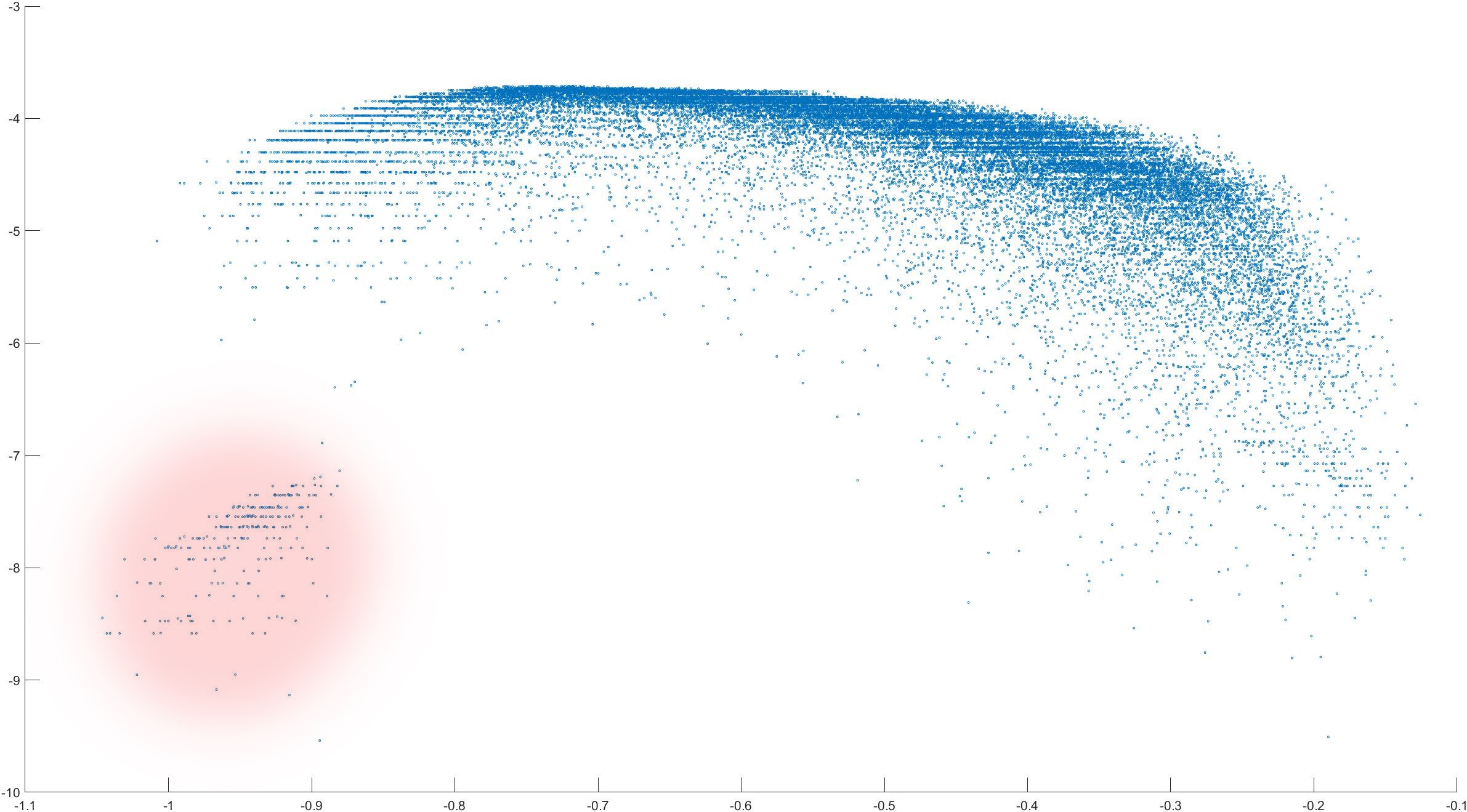
The new idea behind this project was that if we really study the statistics of seismic noise and get to know the usual spatial characteristics of noise in seismically active locations, we will be able to tell the difference between that noise and telltale rock movements - "snaps, crackles and pops" - that might happen locally right before a geological fault line lets loose.
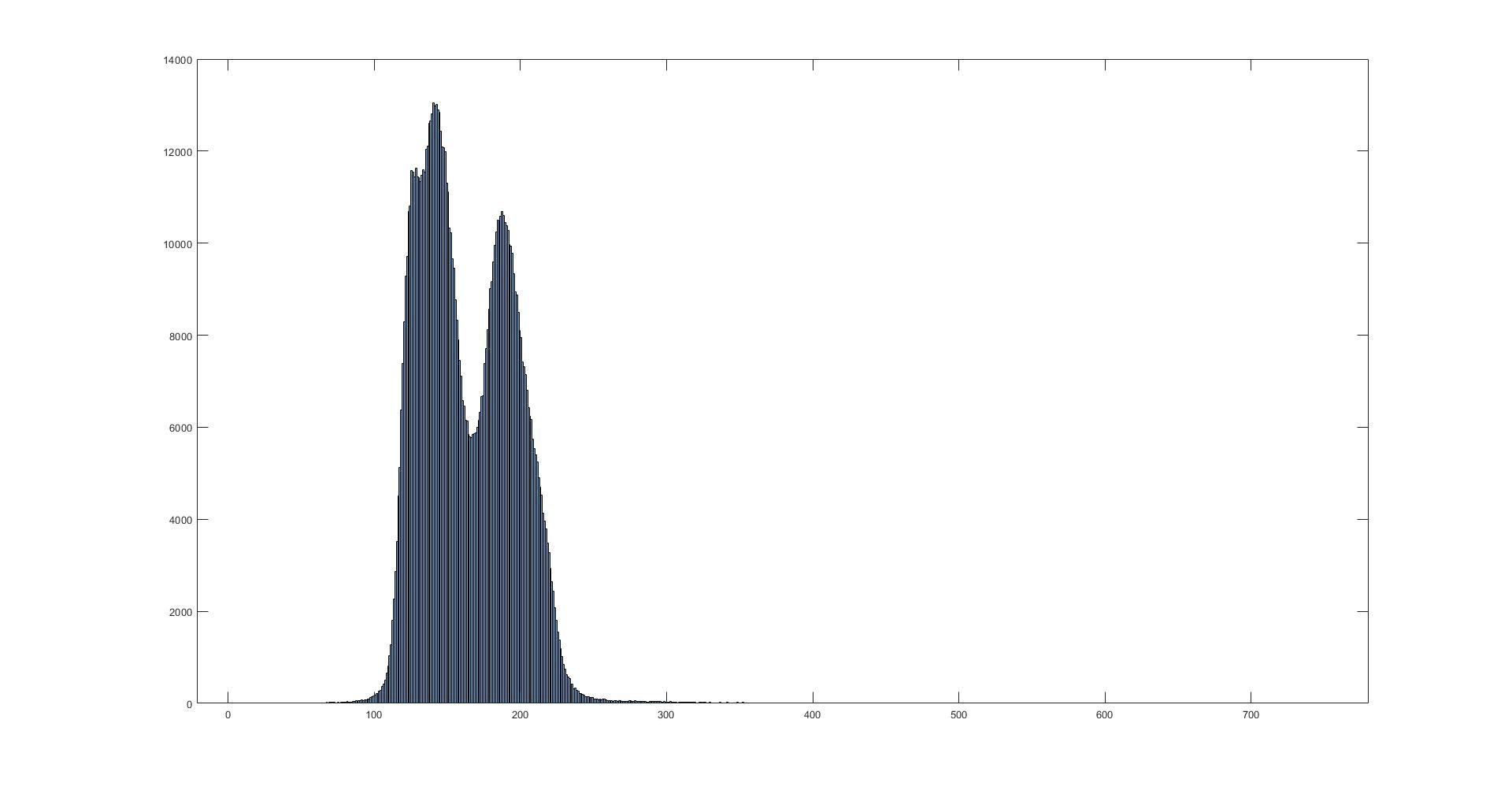
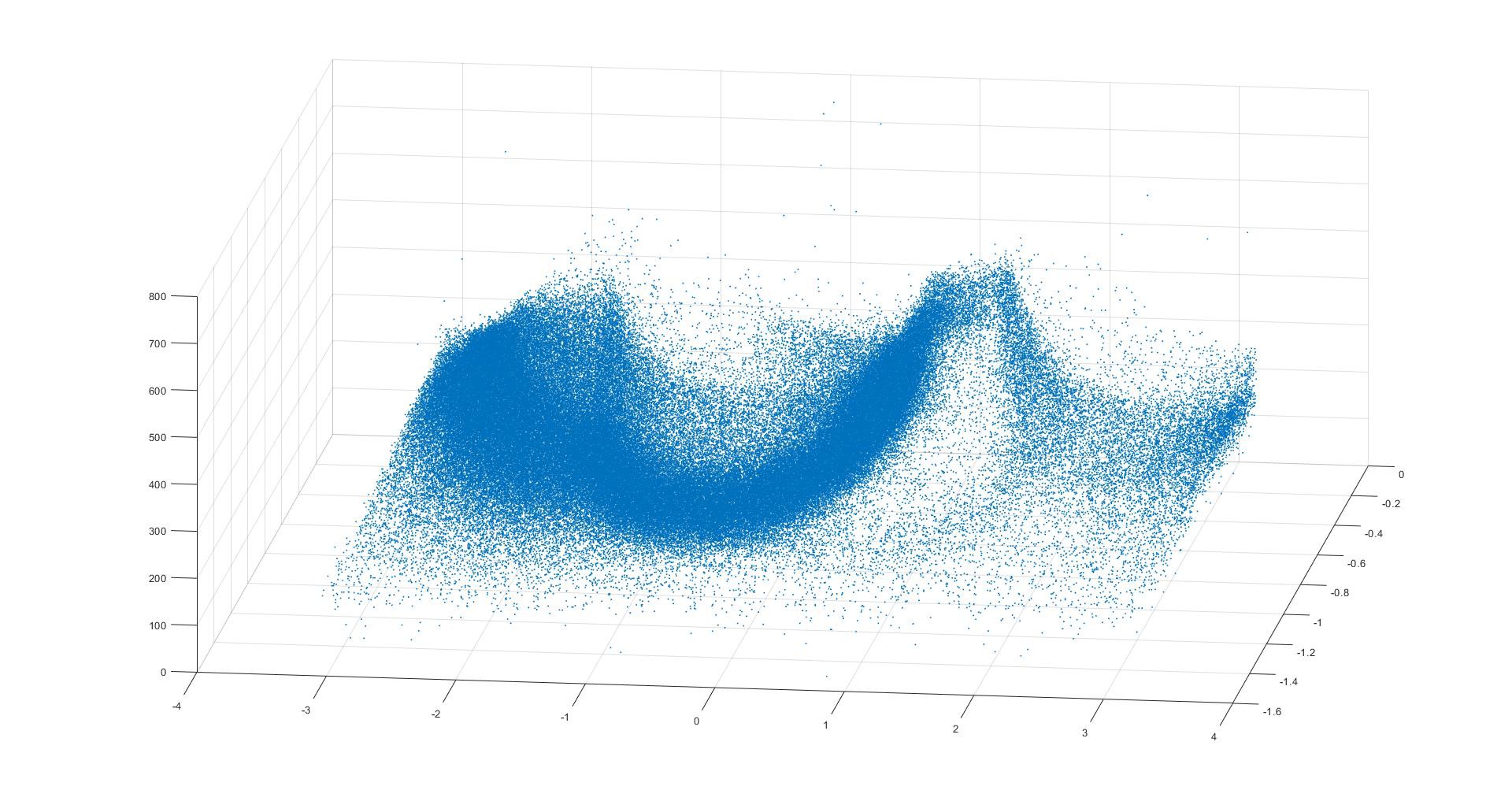
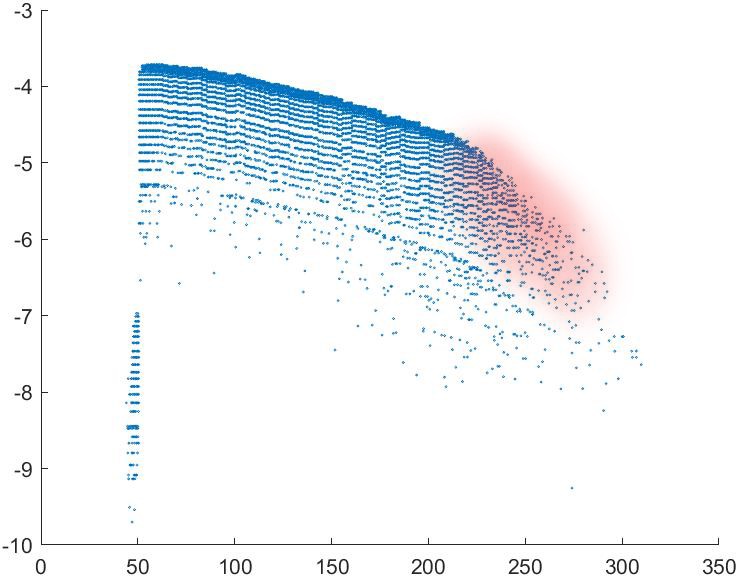
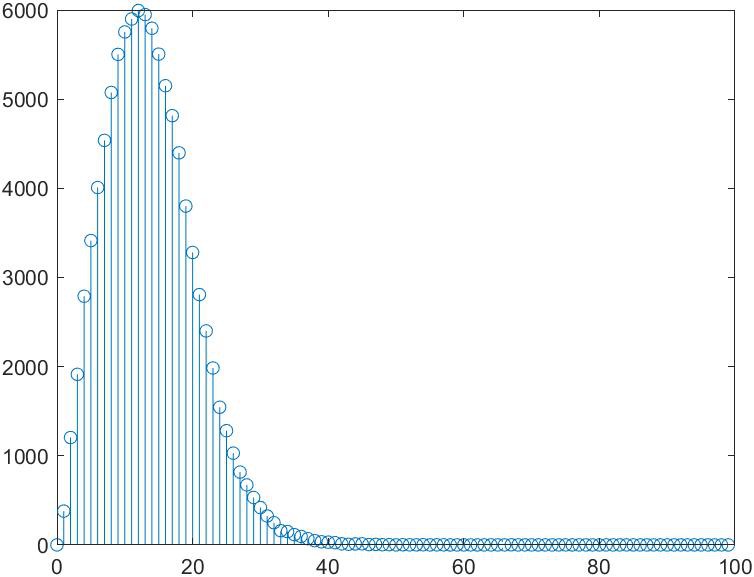
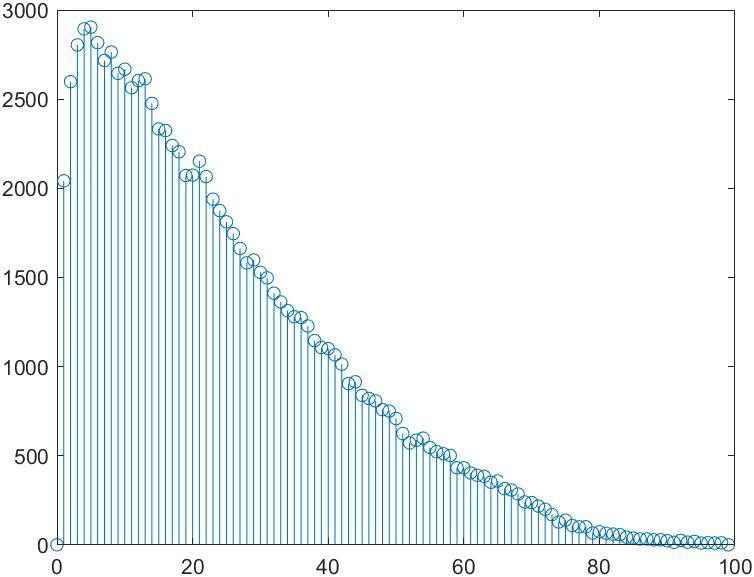
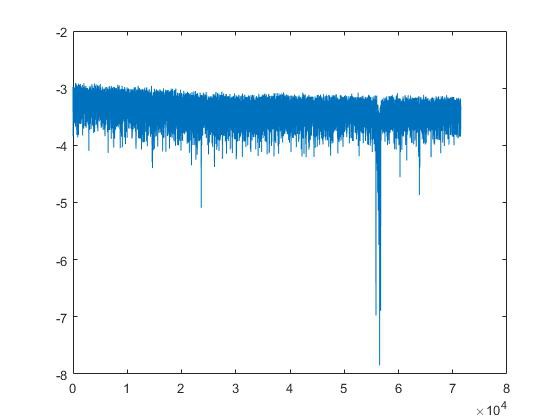
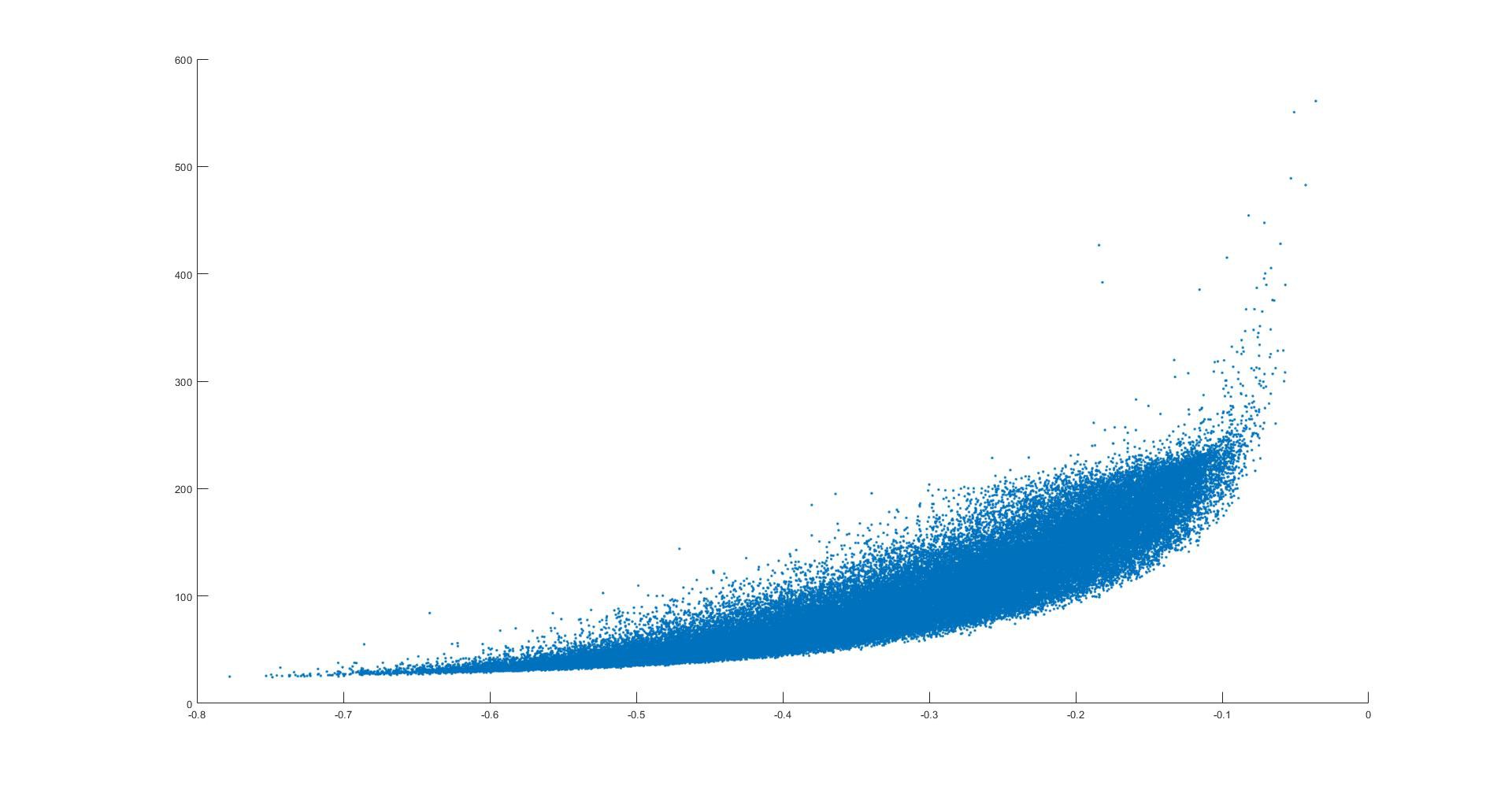
Basically, I am reporting a new kind of design for an ultra, ultra sensitive seismic device for the purpose of responding to the low frequency ( <1.5 Hz ) baseline noise movements of the earth's crust. It outputs information on the vector magnitude, apparent 3D origin (i.e. depth, direction and axis) and actual statistics of each data point. The statistics determine the probability of having a measurement of that particular strength, direction and depth. The current version of the device (August 2020) records all of this information 4 times per second.
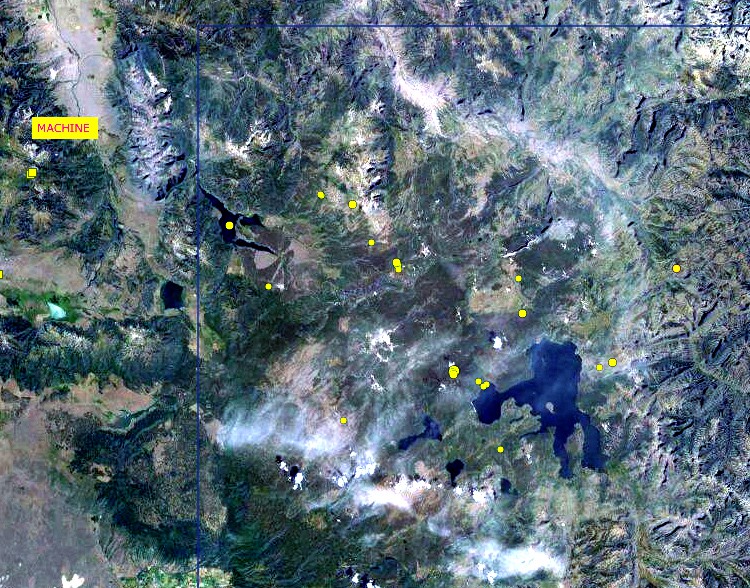
Seismic noise is present everywhere on earth. Some of it is local and some of it arrives from far away. Ocean waves are a one cause of distant noise. Much of it is unexplained.
A little bit of background on the design of this device-
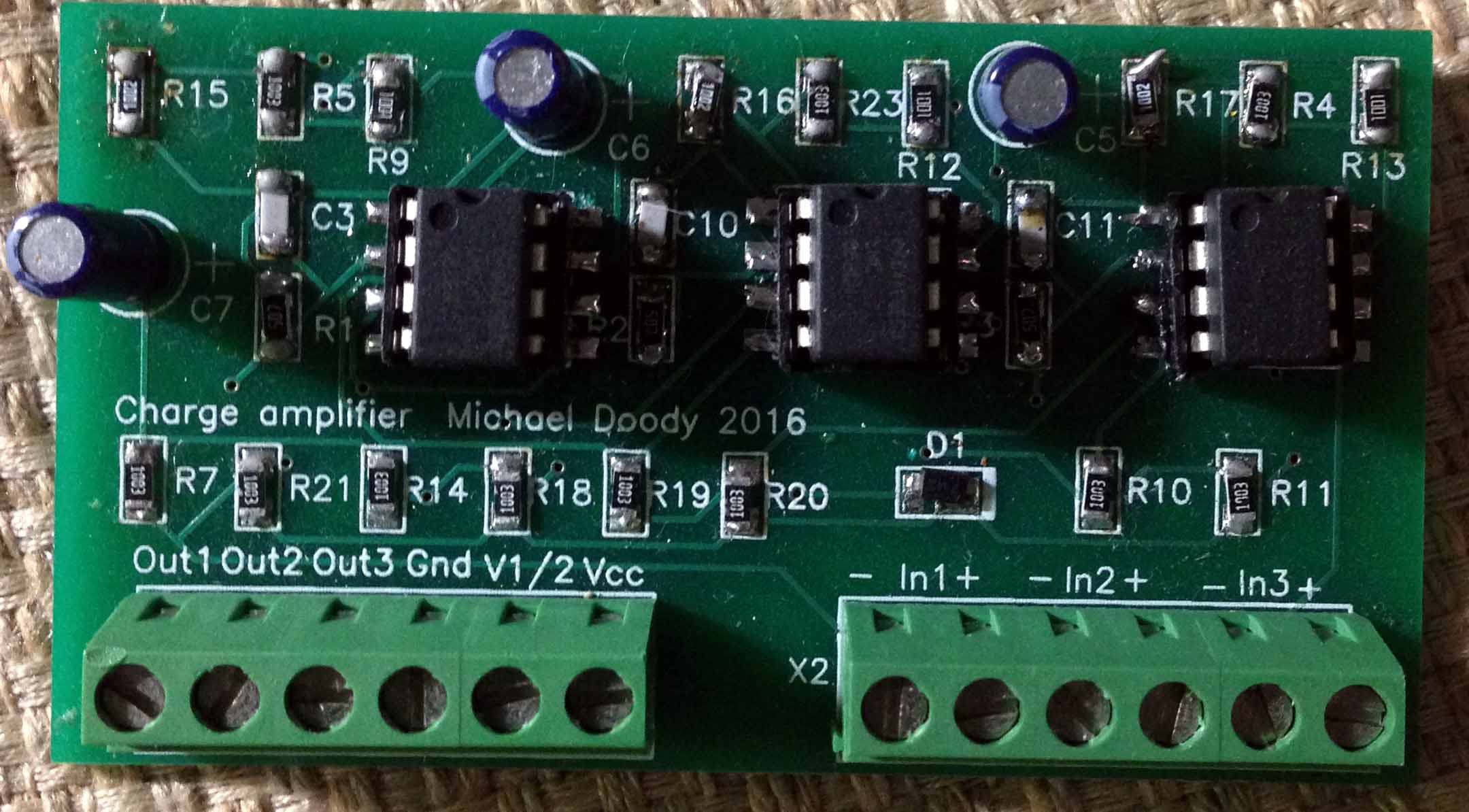
Most useful sensitive seismometers utilize a mechanical moving element with a fixed resonant frequency. Because noise by definition is a composite of a wide range of frequencies, for our purposes this device must not have any significant frequency biases. It must be relatively neutral to all the frequencies in its band. Mechanical designs therefore can't be used for this purpose. Piezoelectic seismic accelerometers are practically frequency independent for seismic purposes and these "geophones" are commercially available, but they are usually very insensitive and they are best used for strong man-made signals in geological exploration. However, piezoelectric pressure sensors still have the theoretical potential for extremely high sensitivity. They have no moving parts or resonant frequencies in the seismic range, they have minimal frequency biases and are widely avaialble in the form of extremely inexpensive but high quality microphone elements. Because of the need for frequency independent noise floor analysis, I needed to design an ultrasensitive inertial piezo instument that pushes its seismic sensitivity to the very limit of what is possible. The other goal is to extract 3D directional information - in other words, to be able to ask "where is the noise (mostly) coming from?" in addition to "How loud is it?" in real time. This has not been done before.
The design is fixed to a wooden base on rubber feet. A stainless steel or mineral sphere is supported by 3 hard insulating plastic beads resting directly on 3 piezoelectric buzzer elements. These elements are themselves symmetrically arranged 120 degrees apart and precisely tilted at a 45 degree angle around the center ball. The buzzer elements are mounted on adjustable supports, like magnetic doorstops available in hardware stores or inexpensive camera tripod heads. Each piezo element provides equal support to the central ball. Movement of the base in any vertical or horizontal direction accelerates the mass and changes the compression force of the ball against its sensors. One of the sensors is aligned to true north as a direction reference. The precise geometry of the device allows for the mathematical calculation of the...
Read more »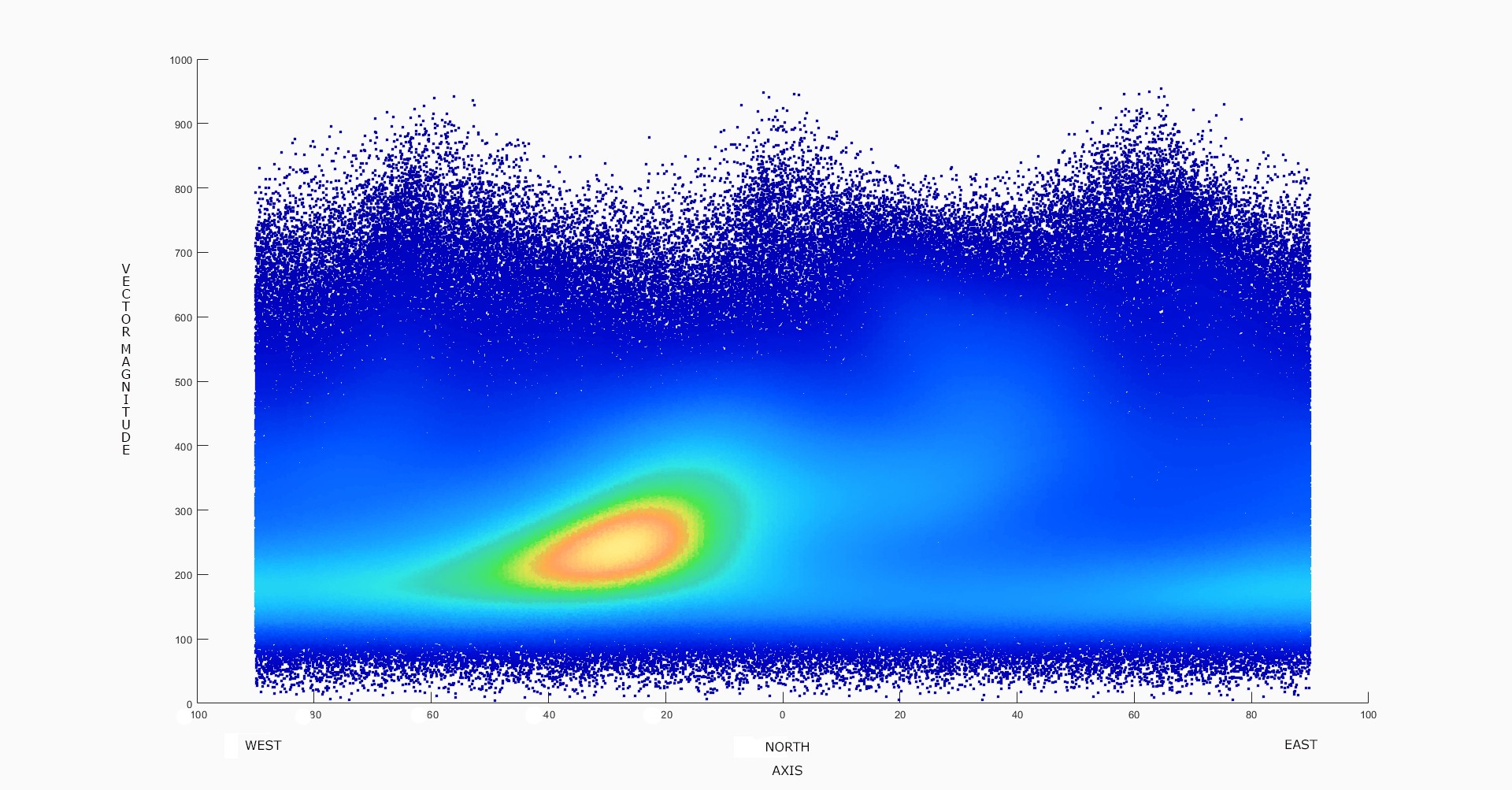




















 Henryk Plötz
Henryk Plötz
 Piotr Gaczkowski
Piotr Gaczkowski
Thank you for sharing!
I could not find the source code.
Is there some and where can i find it?
Thank you!