0%
0%
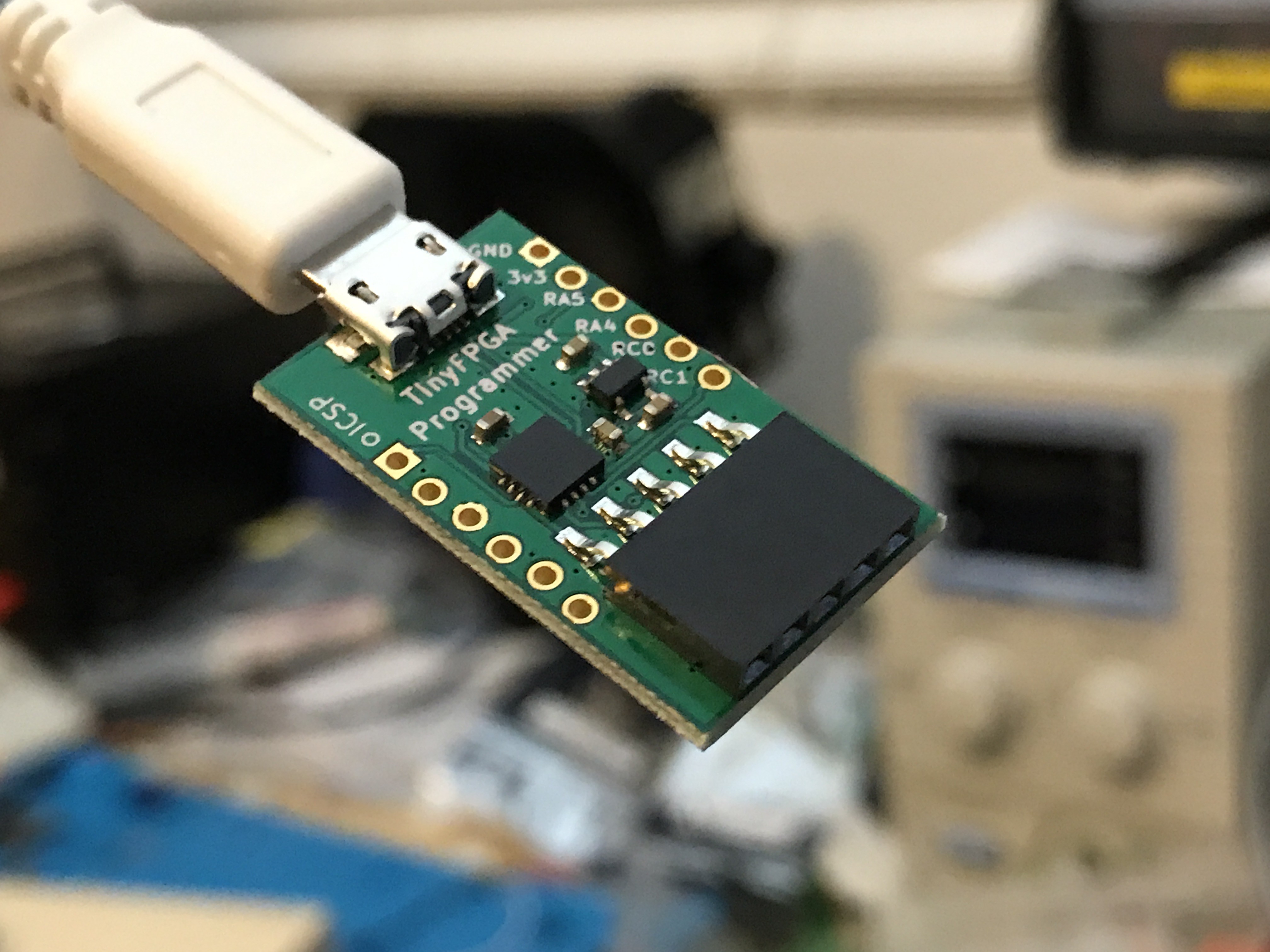
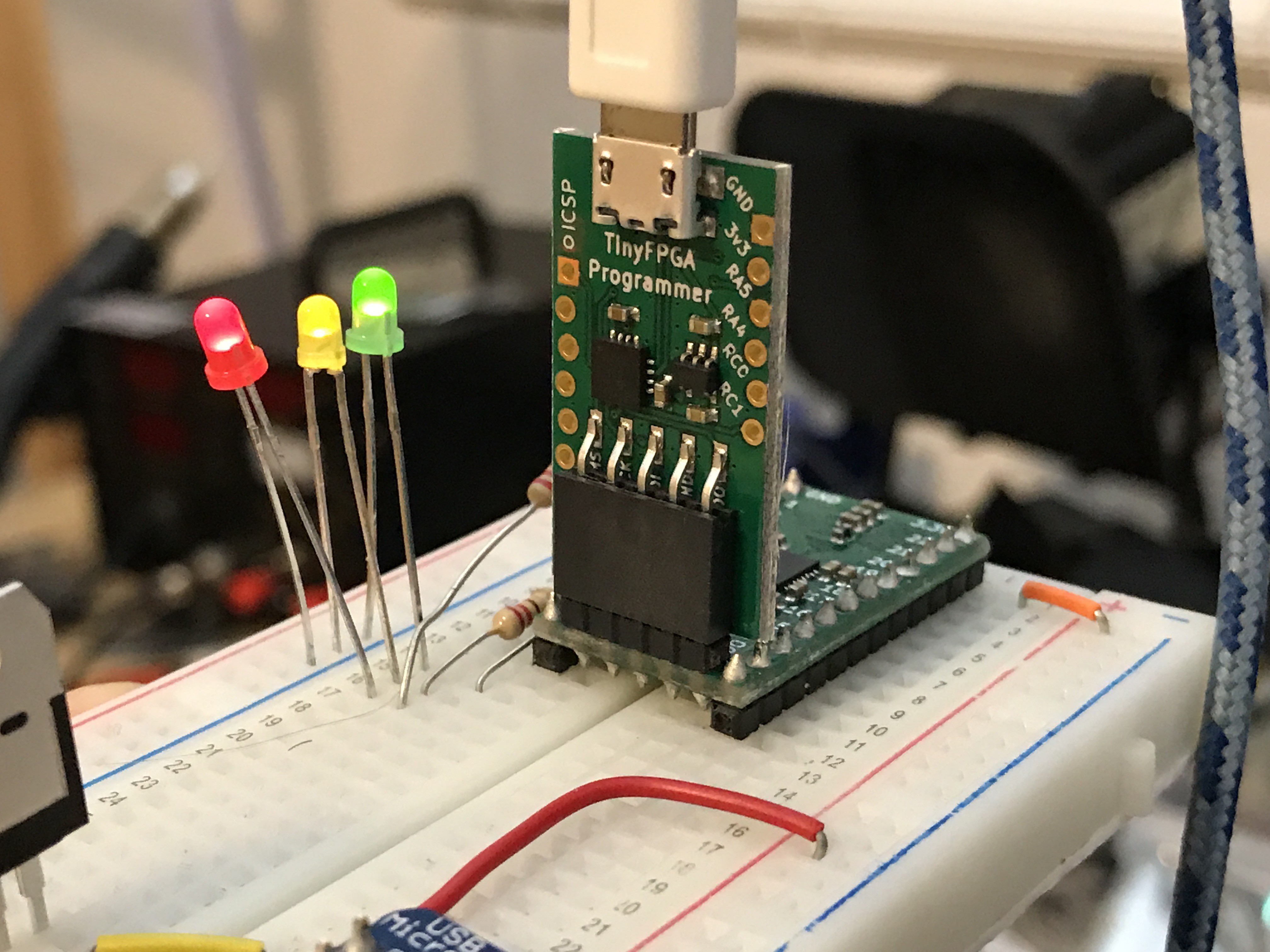
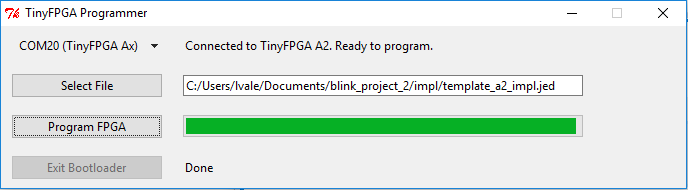
TinyFPGA Programmer
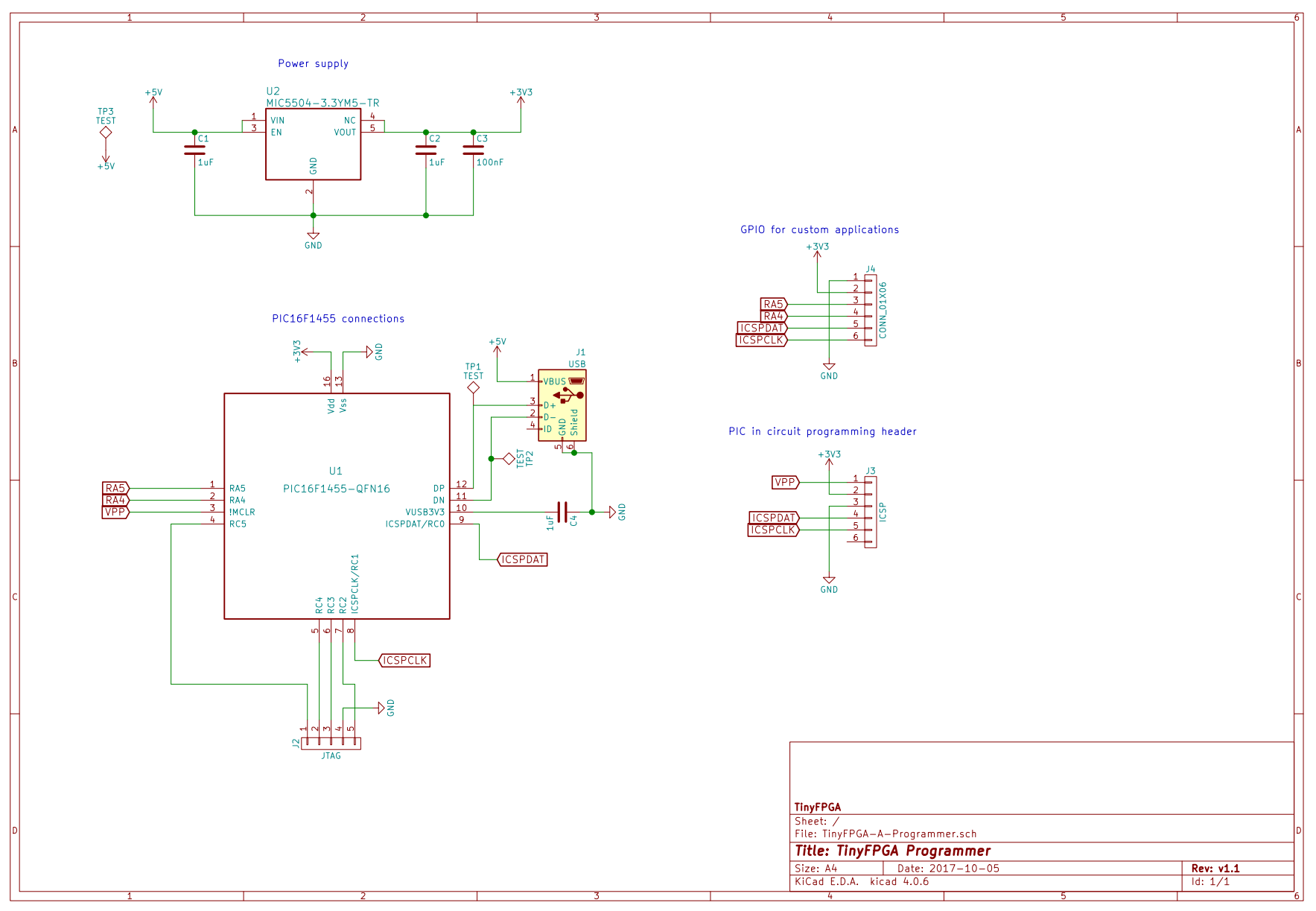
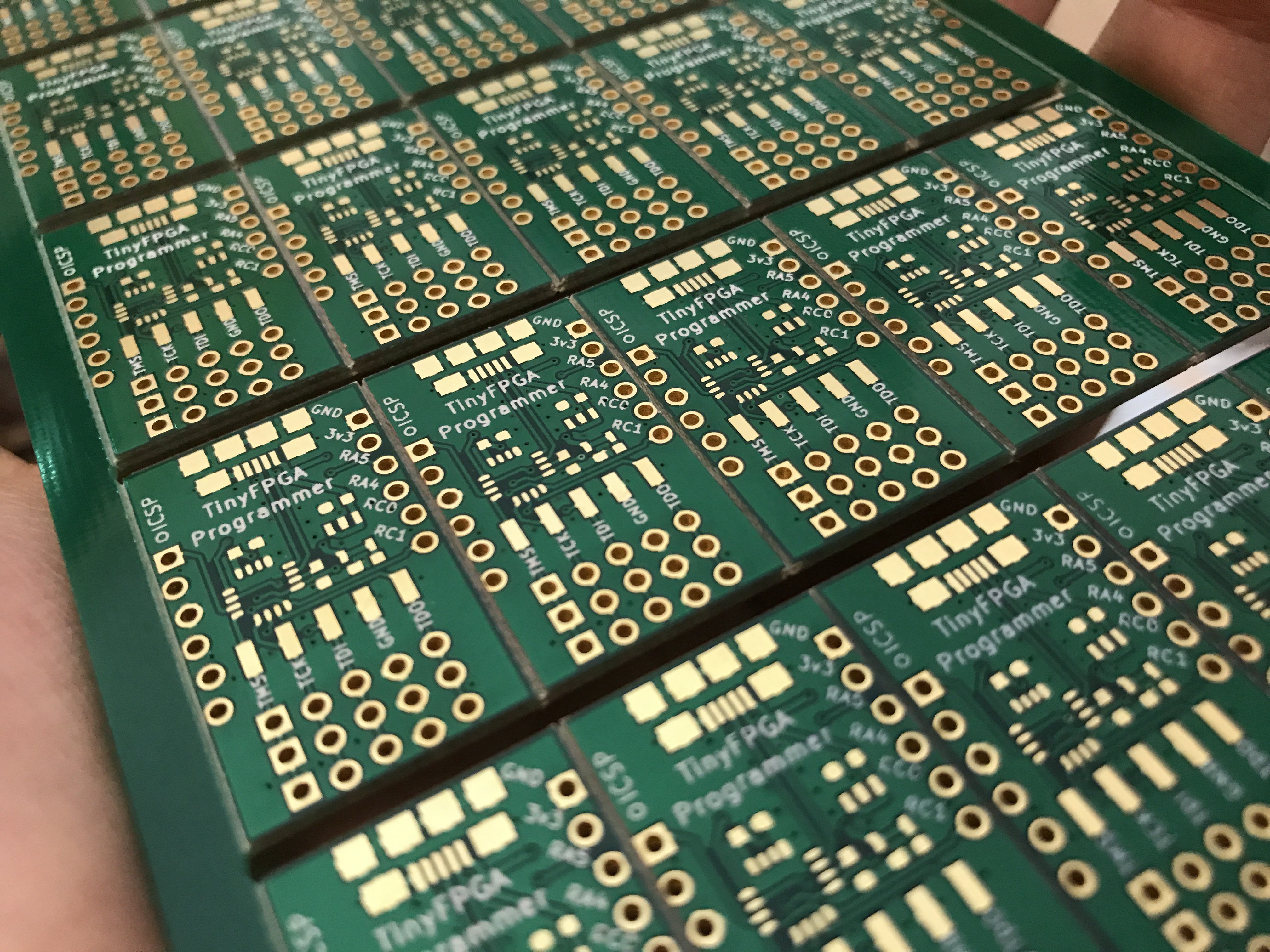
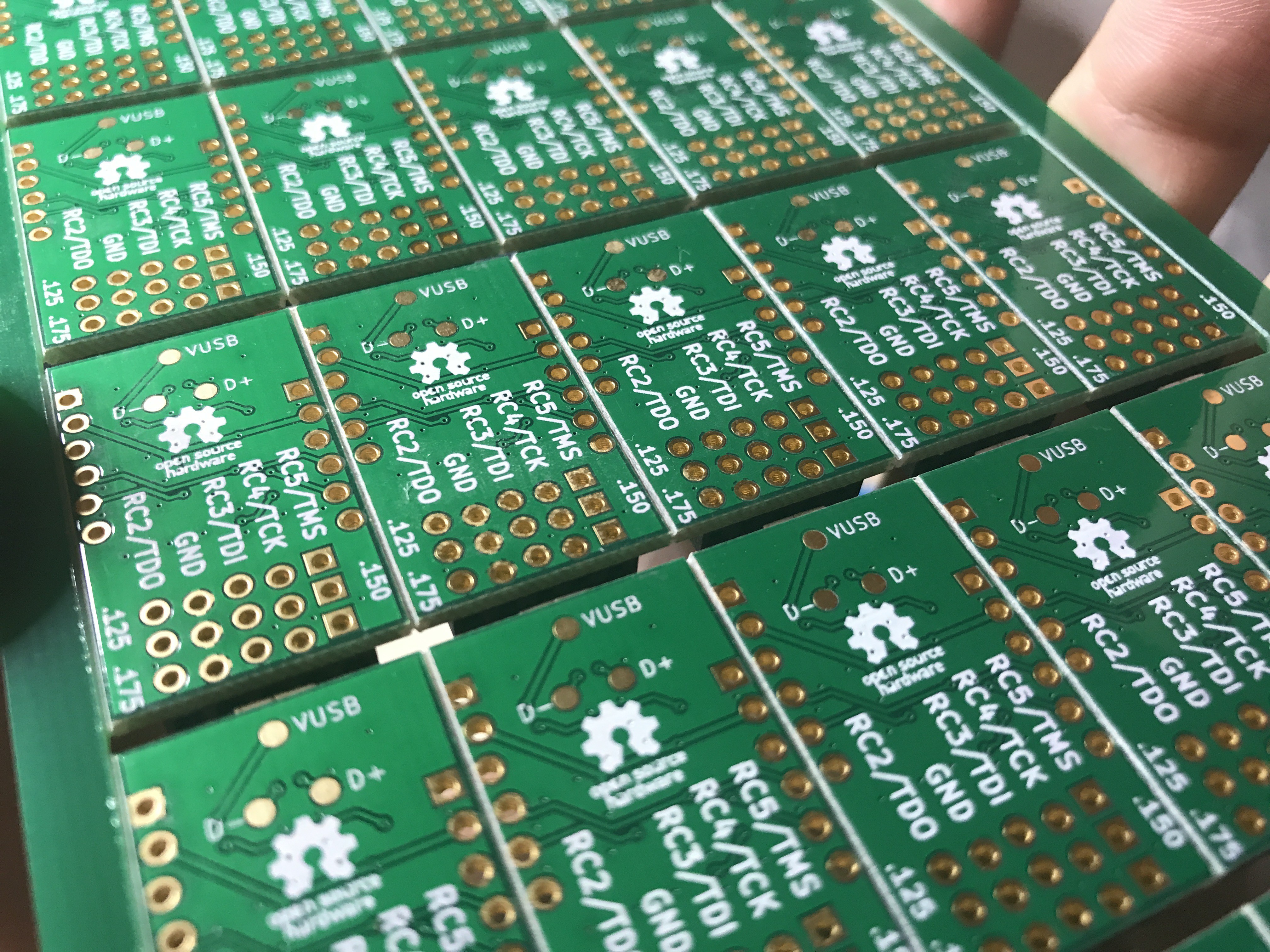
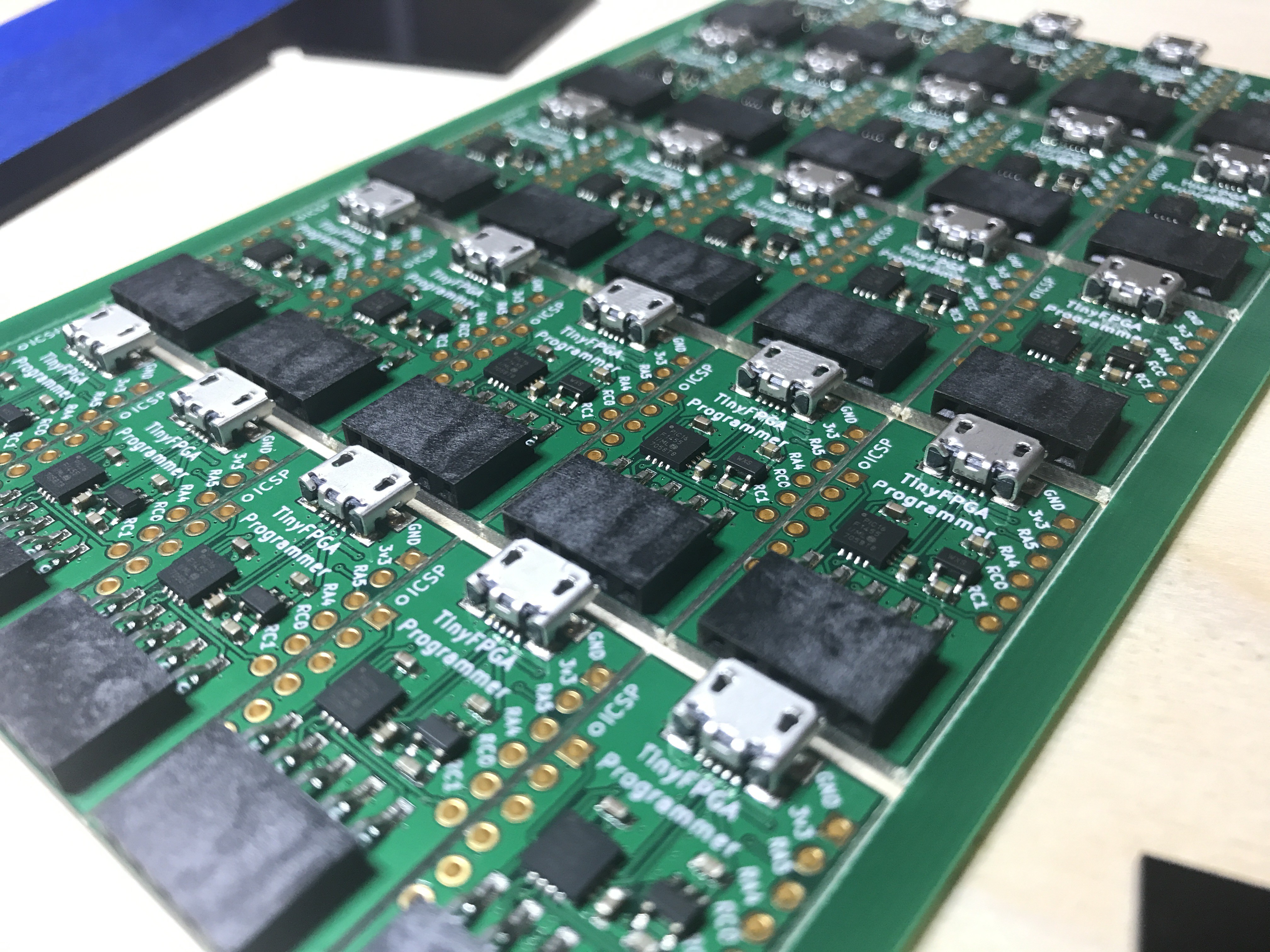
A dirt cheap open hardware USB-JTAG board designed to program TinyFPGA A1 and A2 boards.
 Luke Valenty
Luke ValentyBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 TinyFPGA Programmer Firmware Command Encoding
TinyFPGA Programmer Firmware Command Encoding

 Necromant
Necromant
 Tom Van den Bon
Tom Van den Bon
 charliex
charliex
 Owen Trueblood
Owen Trueblood
Would this programmer work for other Lattice MachXO2 devices - specifically the LCMXO2-1200HC? I understand it has a fixed 3.3V I/O voltage, which is fine, but I'm not sure if the hardware or software may have a max limit on the size of the FPGA configuration data or other issues with chips beyond the ones used in the Tiny FPGA devices. I've found that the $20 Lattice programmer clones on eBay (at least the one I got) use an LS244 chip as the output buffer, which works poorly in a 3.3V system - the LS244 supposedly has a 4.75V minimum supply voltage. It seems to work with a 3.3V supply but has 1.9V output for logic high. I'm reluctant to buy another eBay programmer since I don't know if this was a one-time assembly error or a flaw in the design of this popular Lattice clone.