 deʃhipu
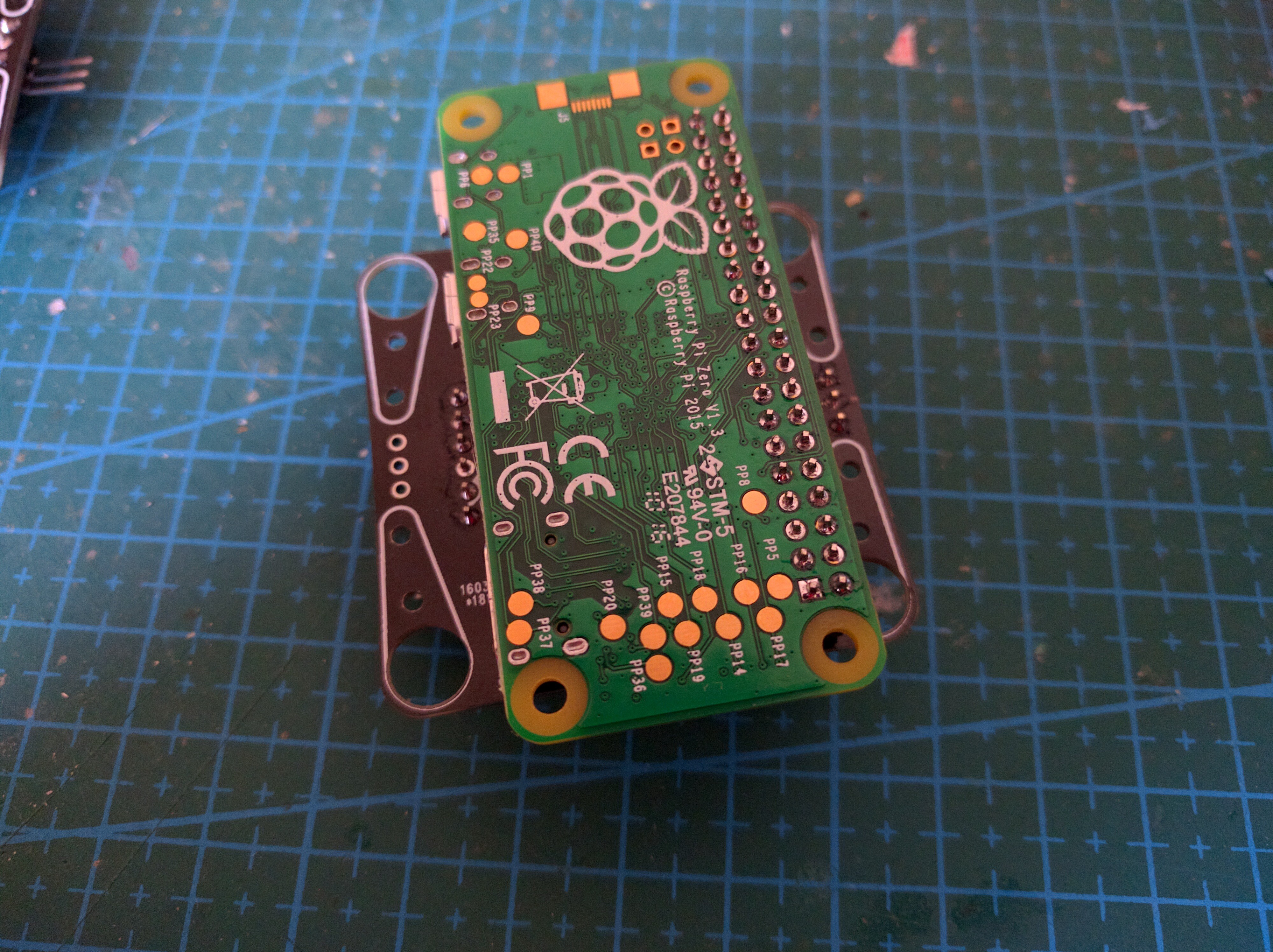
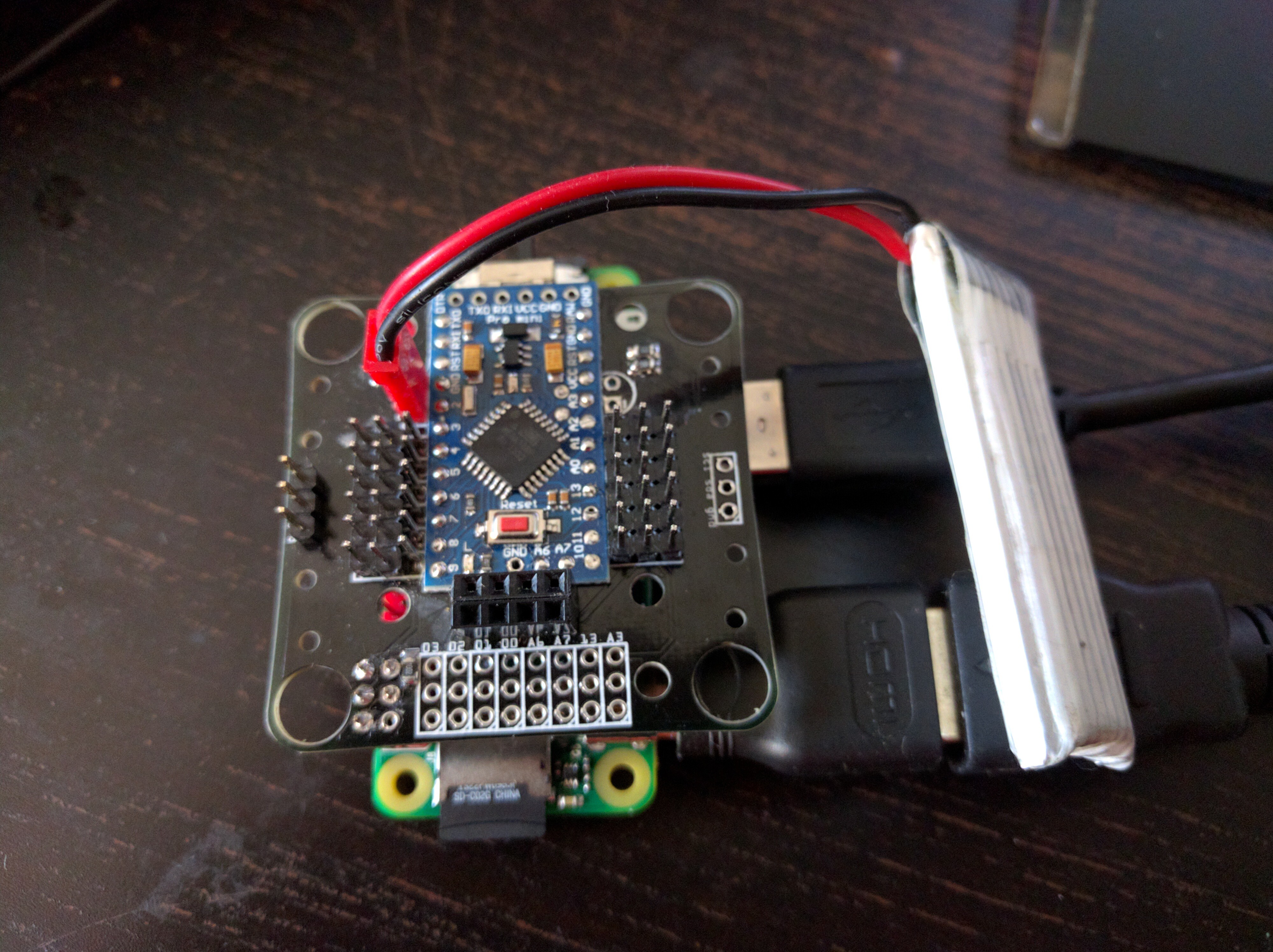
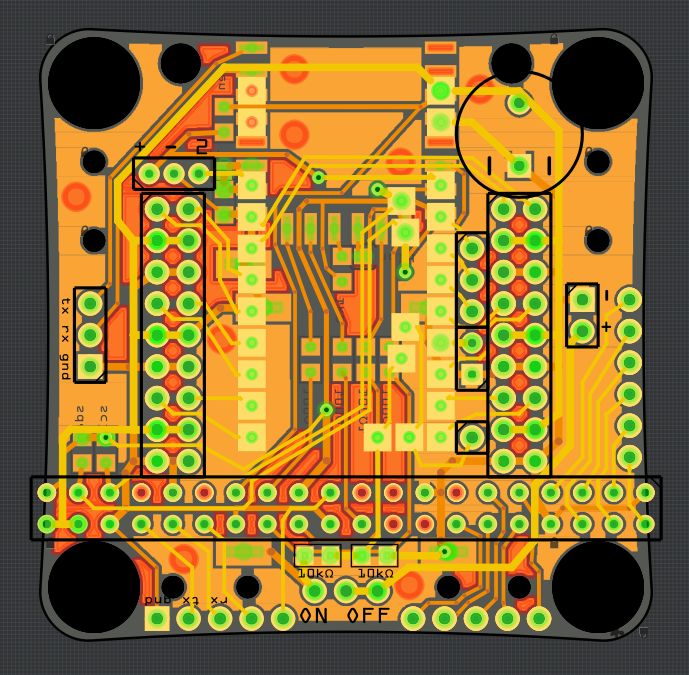
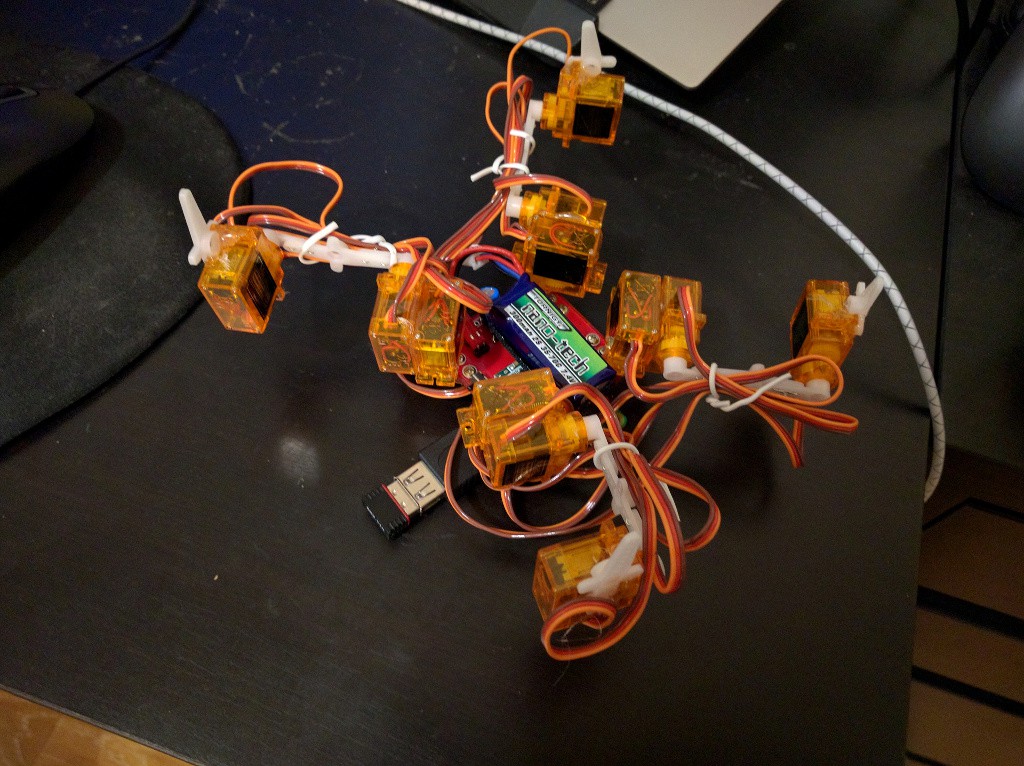
deʃhipuThe original #Tote used an Arduino Pro Mini clone for its brains, as this was the most affordable option available at the time, and reasonably easy to use and program. But now that there is a $5 single-board computer available, why not use it instead?
The advantages, as I see them, are three-fold:
- using Python for programming, which makes it much easier to both write code and test stuff in the interactive console,
- possibly integrating this with ROS, OpenCV and other awesome tools,
- much more computing power, which means that more interesting things can happen.











Congratulations, pal!