 EK
EKSolution
Kite Propulsion sees the abundance of wind energy as dual use: propulsion and generation.
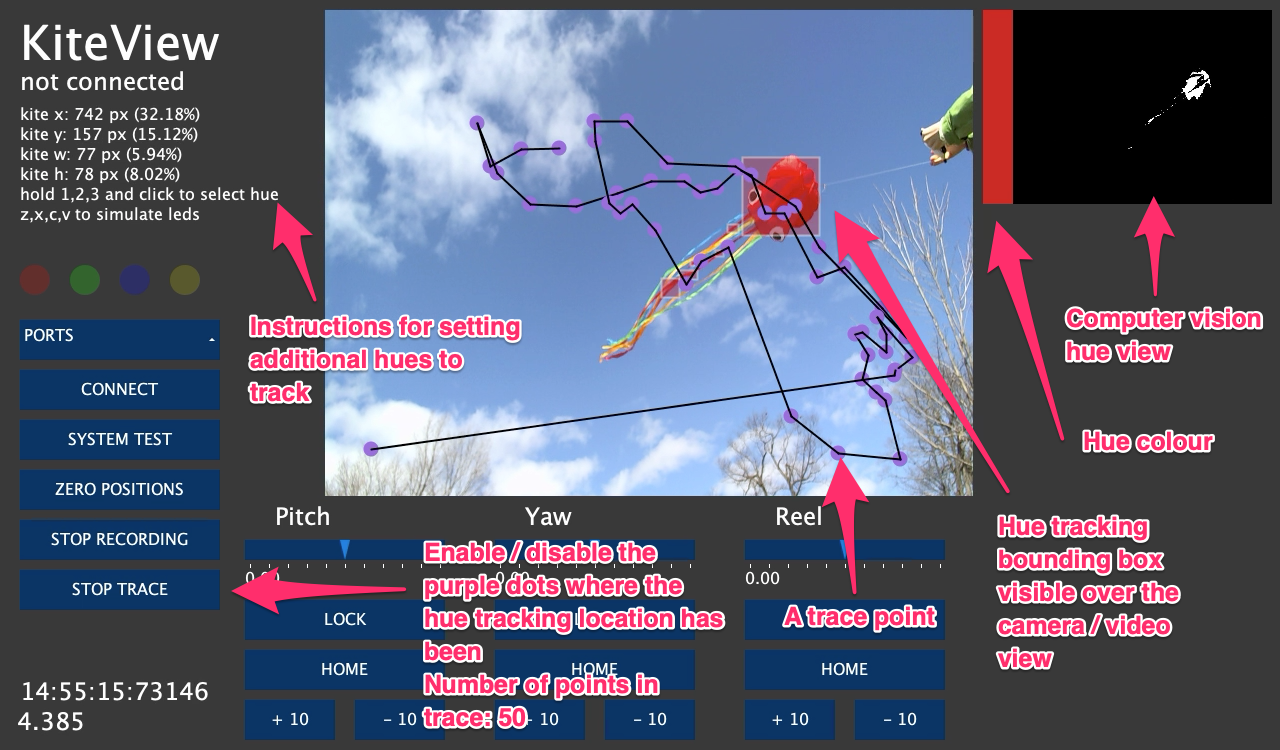
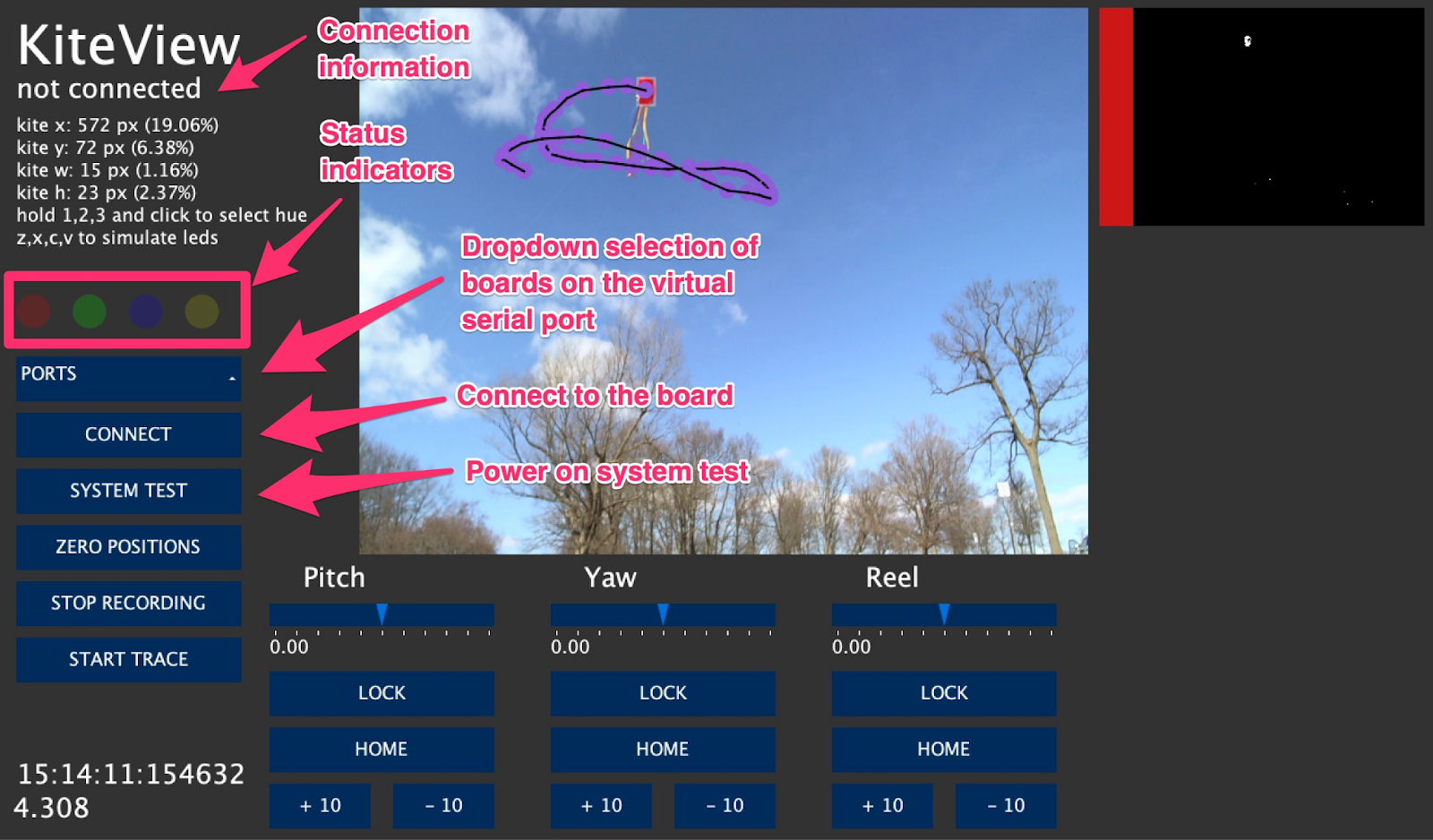
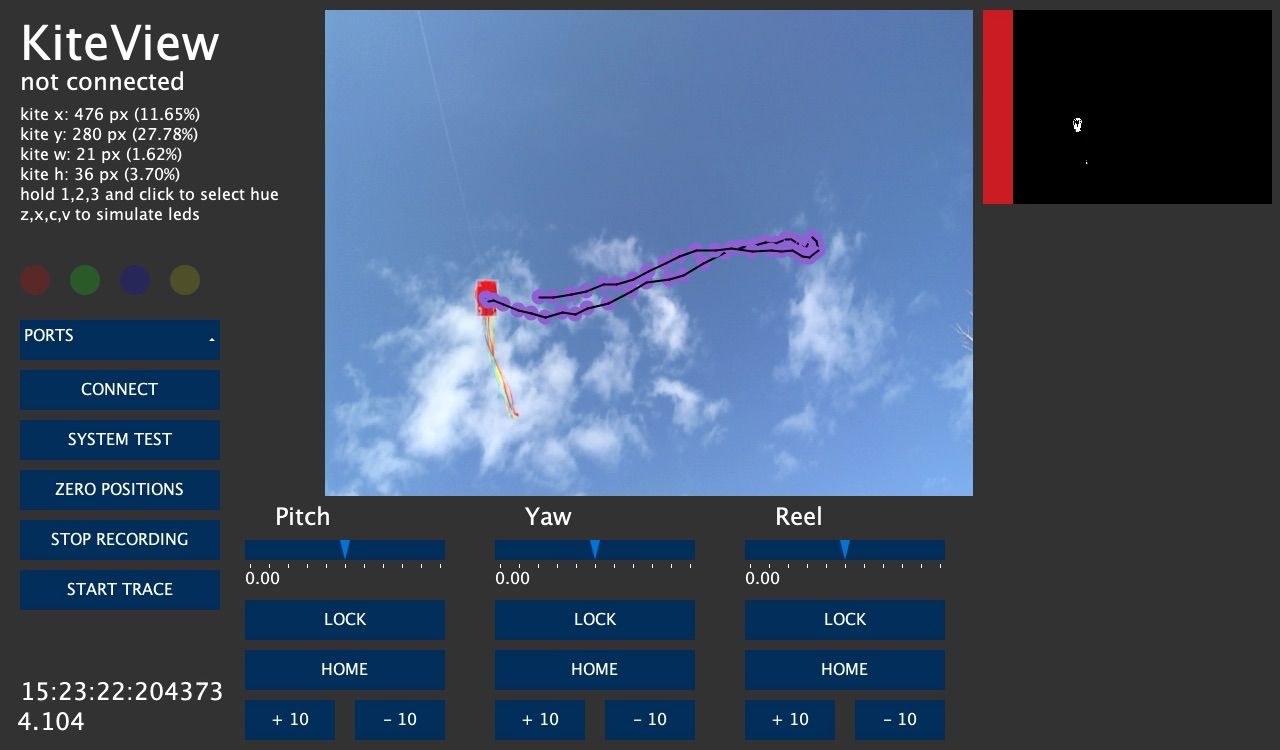
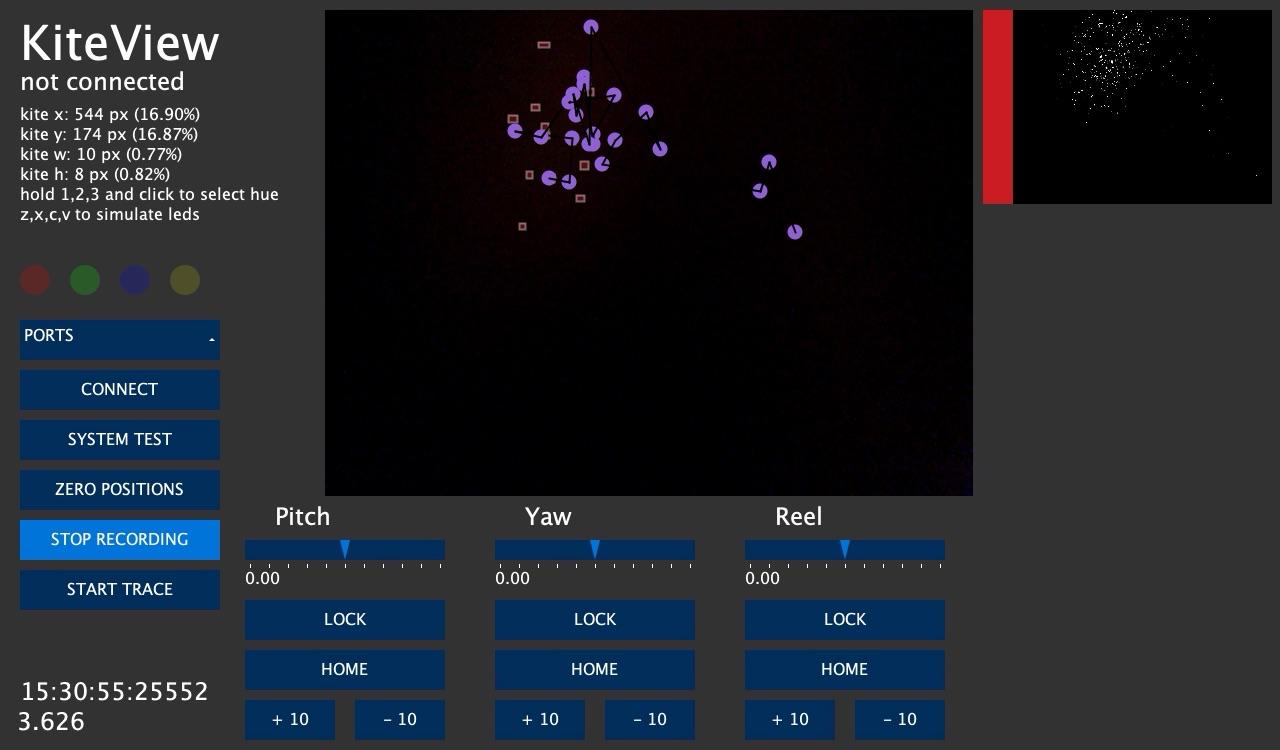
Our system is unique as it controls the kite using software with computer vision, communicating the directions to the steering motors module.
The impact of our approach can be seen from the overall picture:
- Energy generated
- Materials used
- Transportation
- Maintenance
- Efficiency of speed/distance travelled (Propulsion)
Implementation
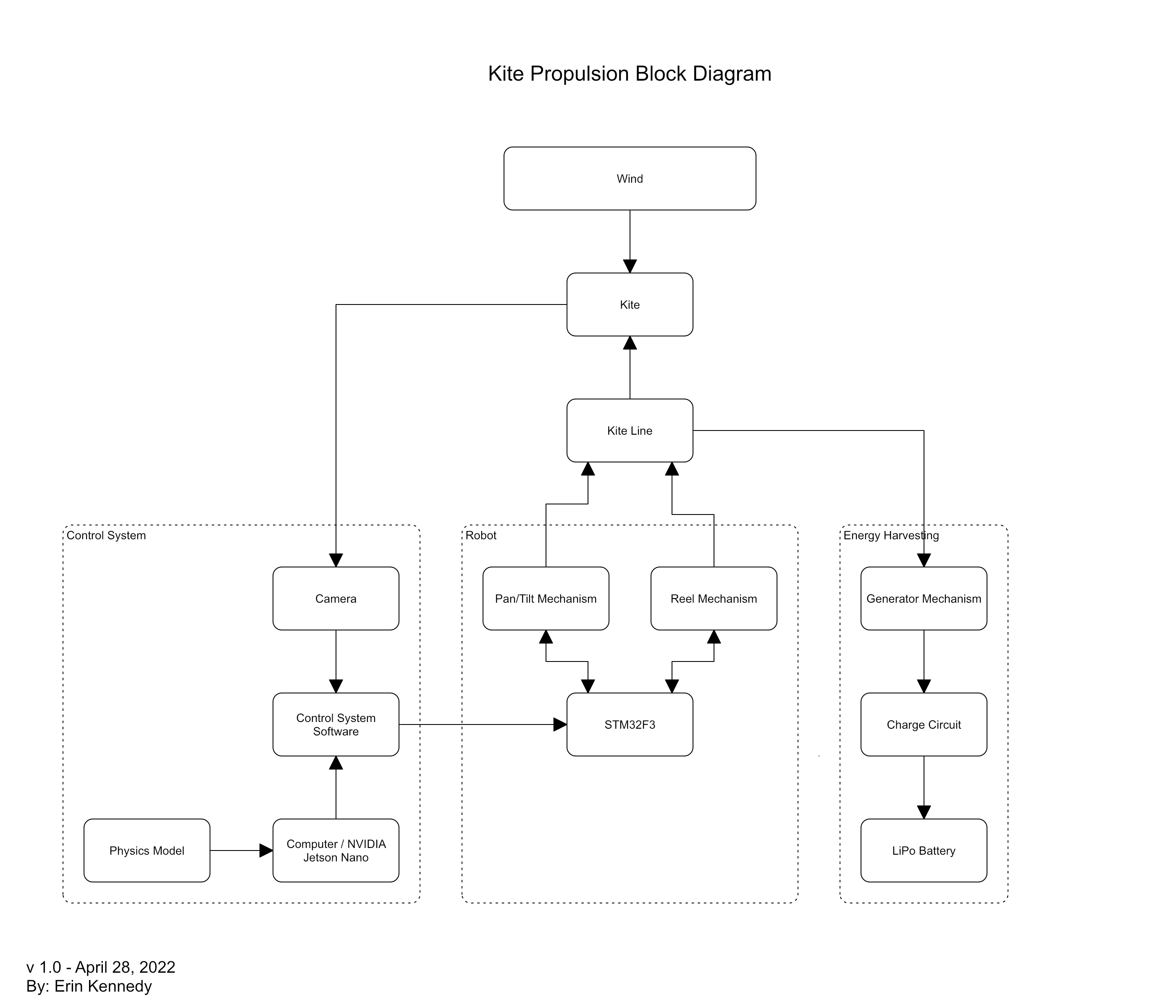
The system is designed to be modular for those replicating the project to control their kites. There are three modules:
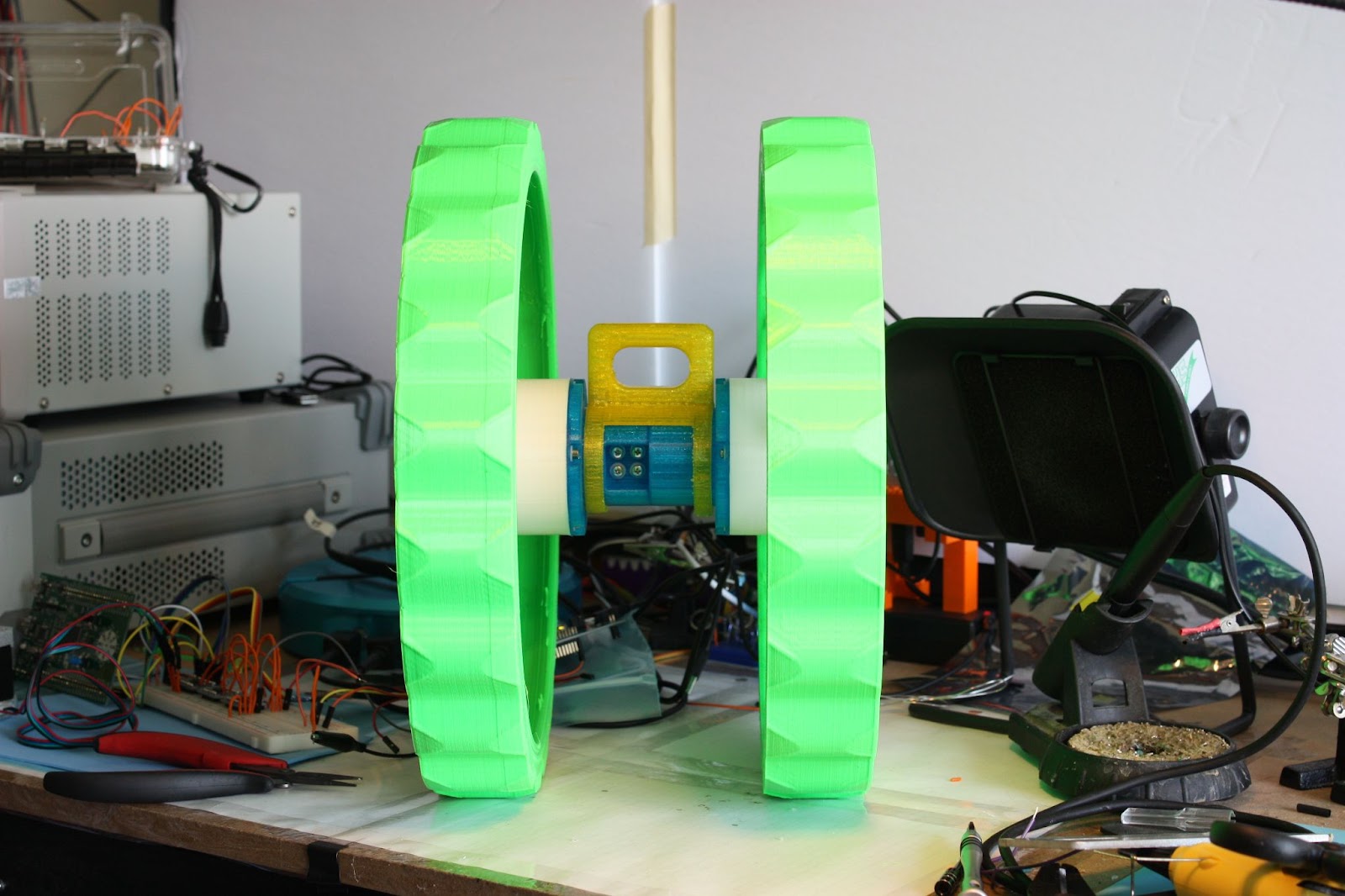
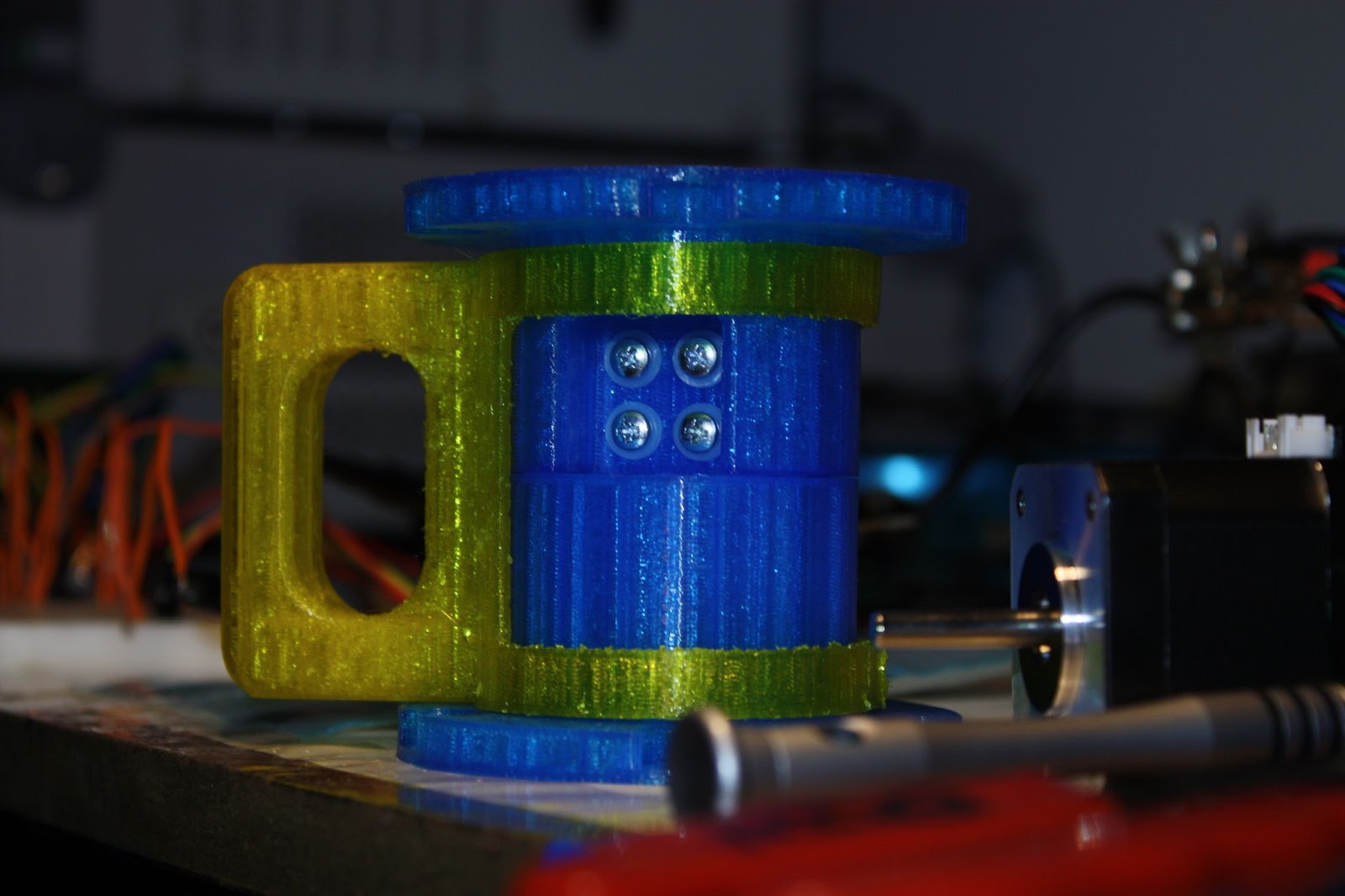
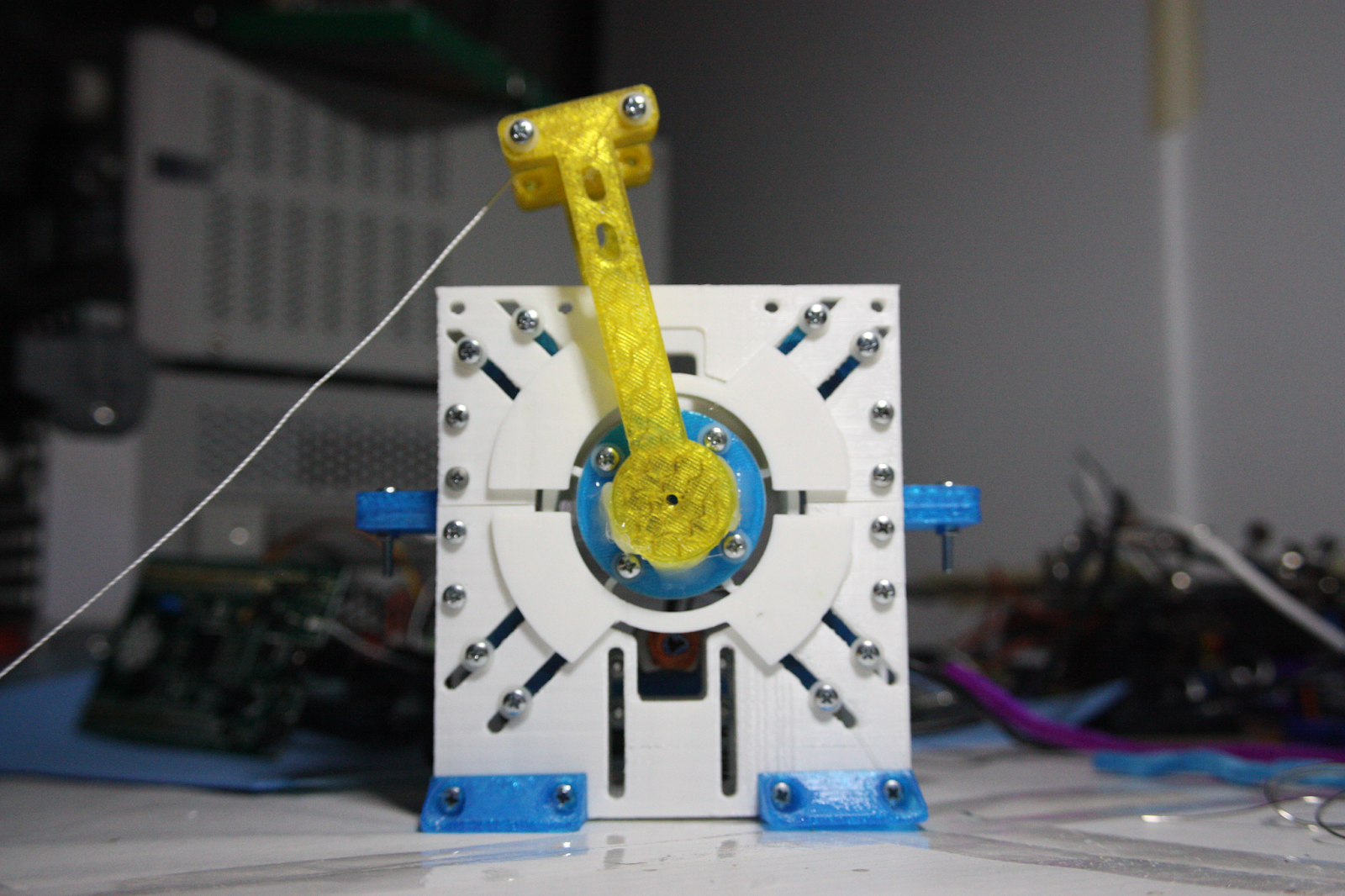
- Generator
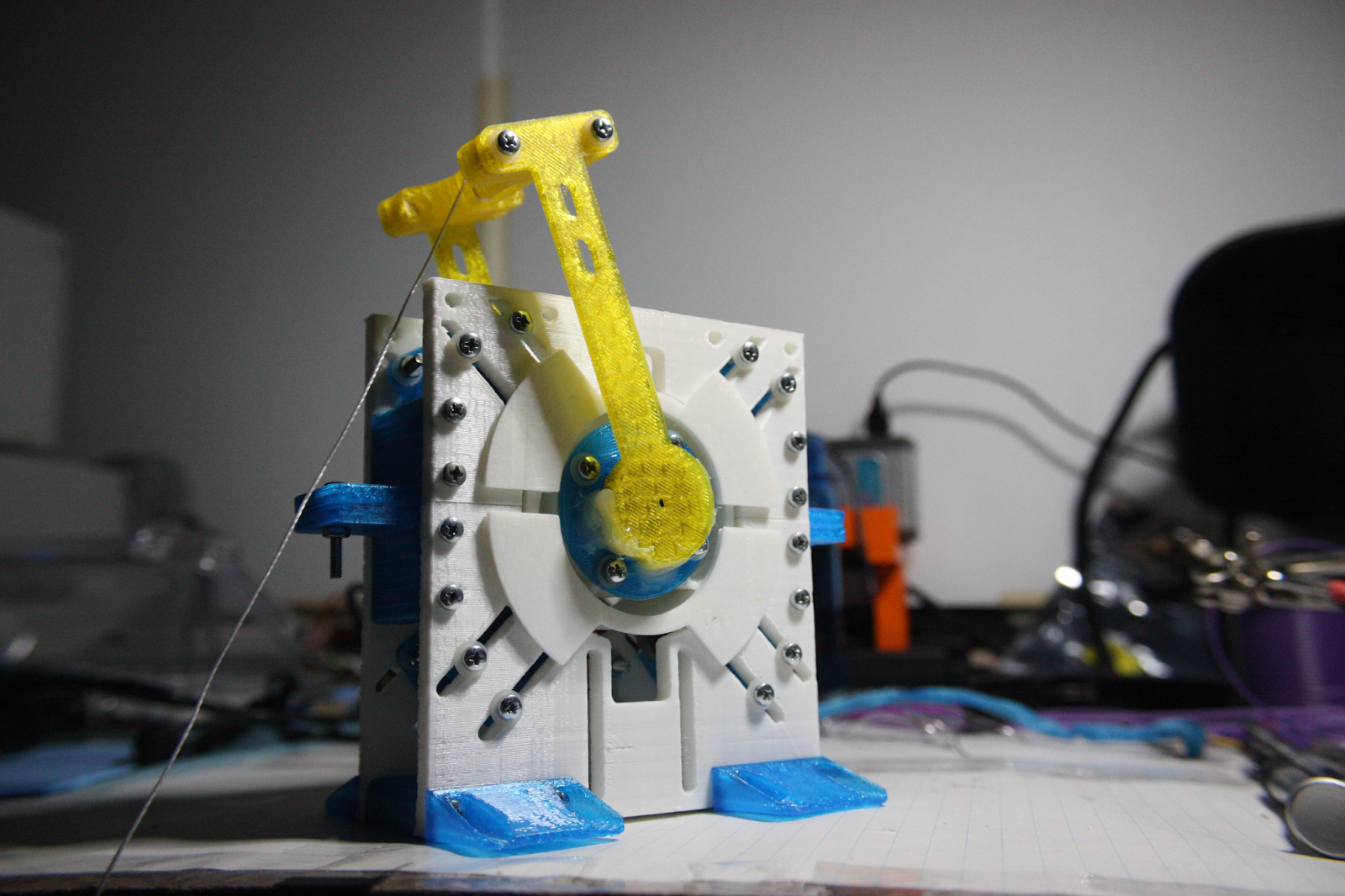
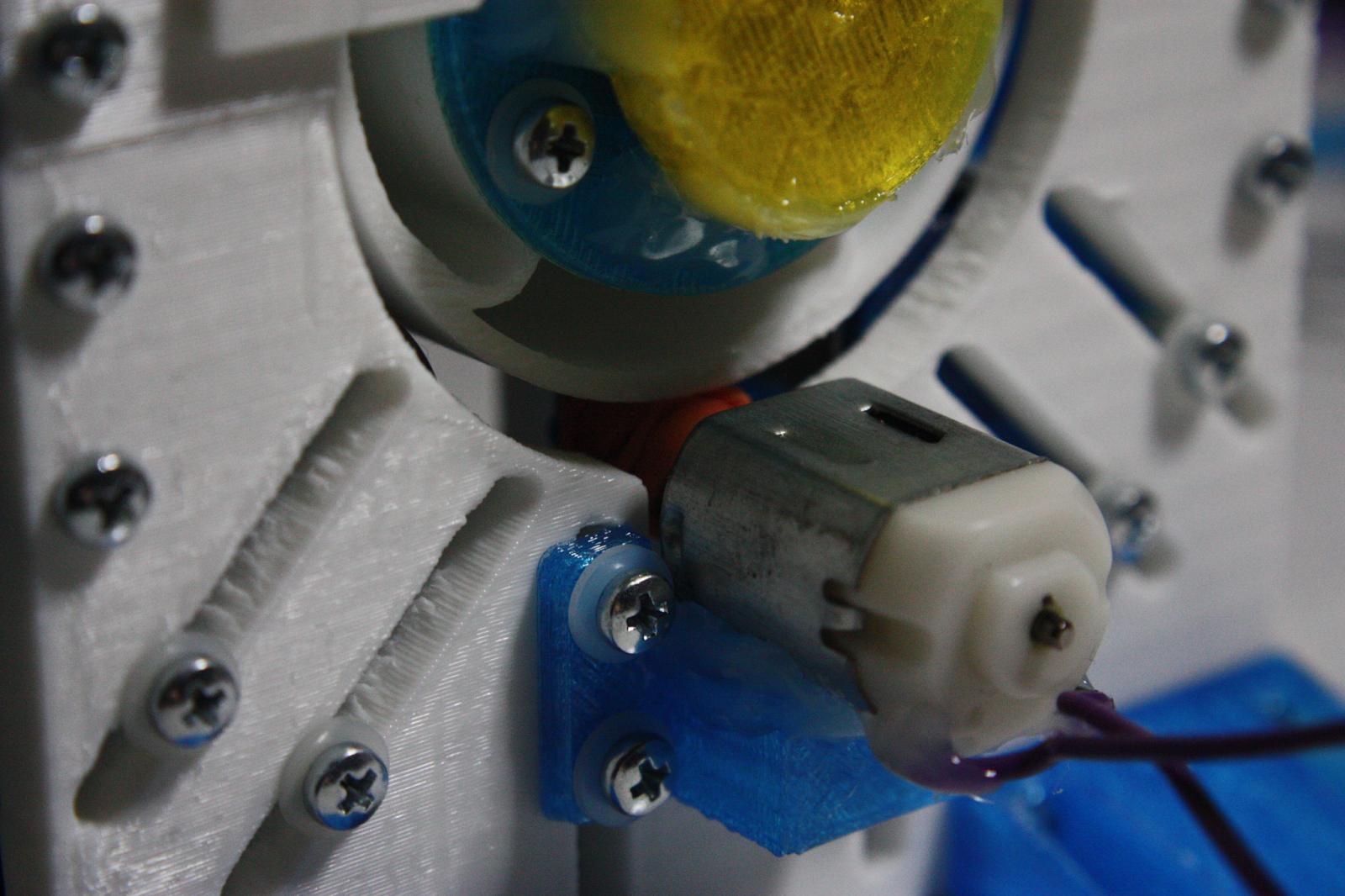
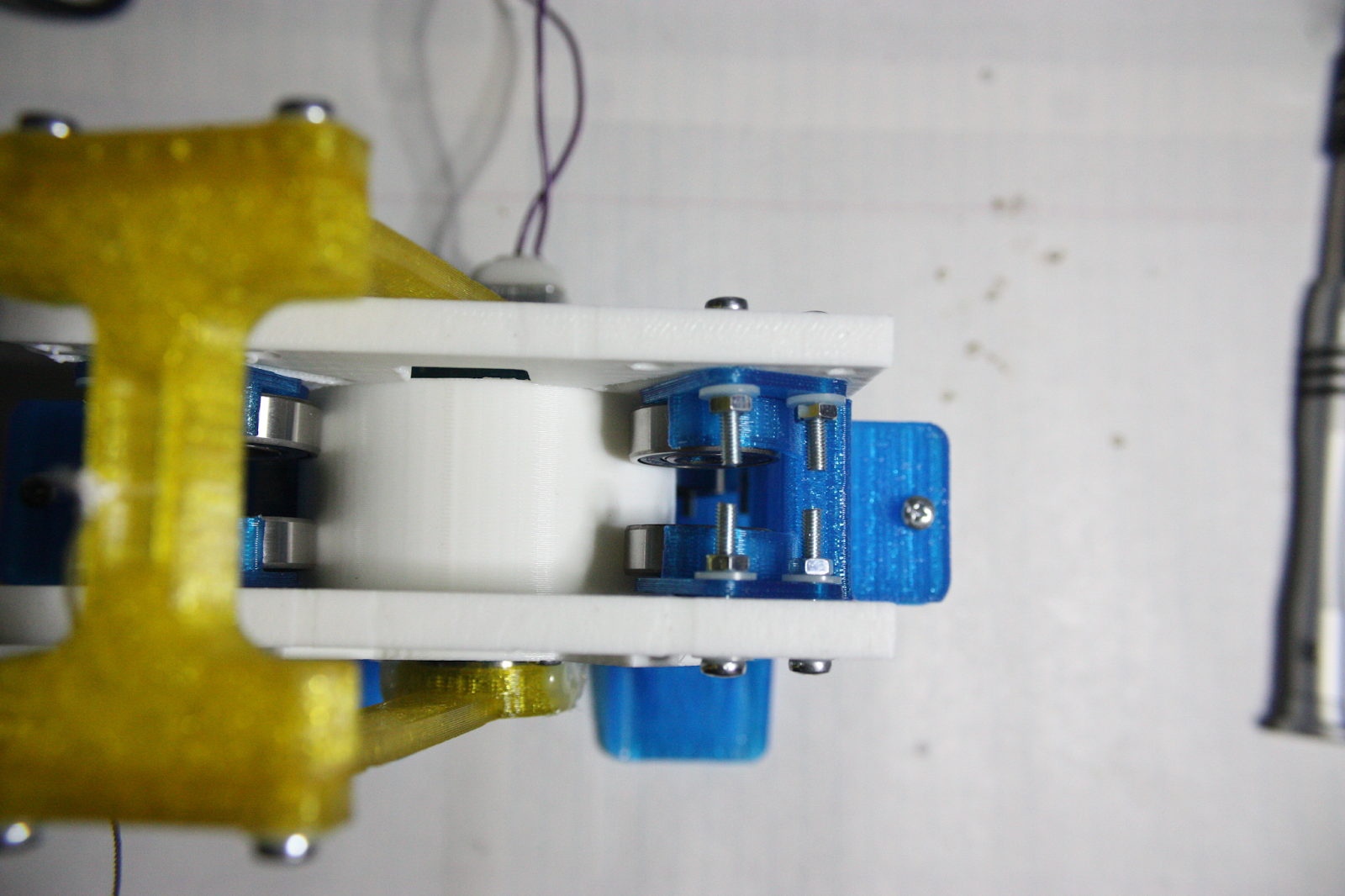
- Pitch & Yaw Steering
- Reel Mechanism
This makes it applicable to single lined kites, to dual lined, and more. Being a computer vision system, it can scale to larger sized kites.
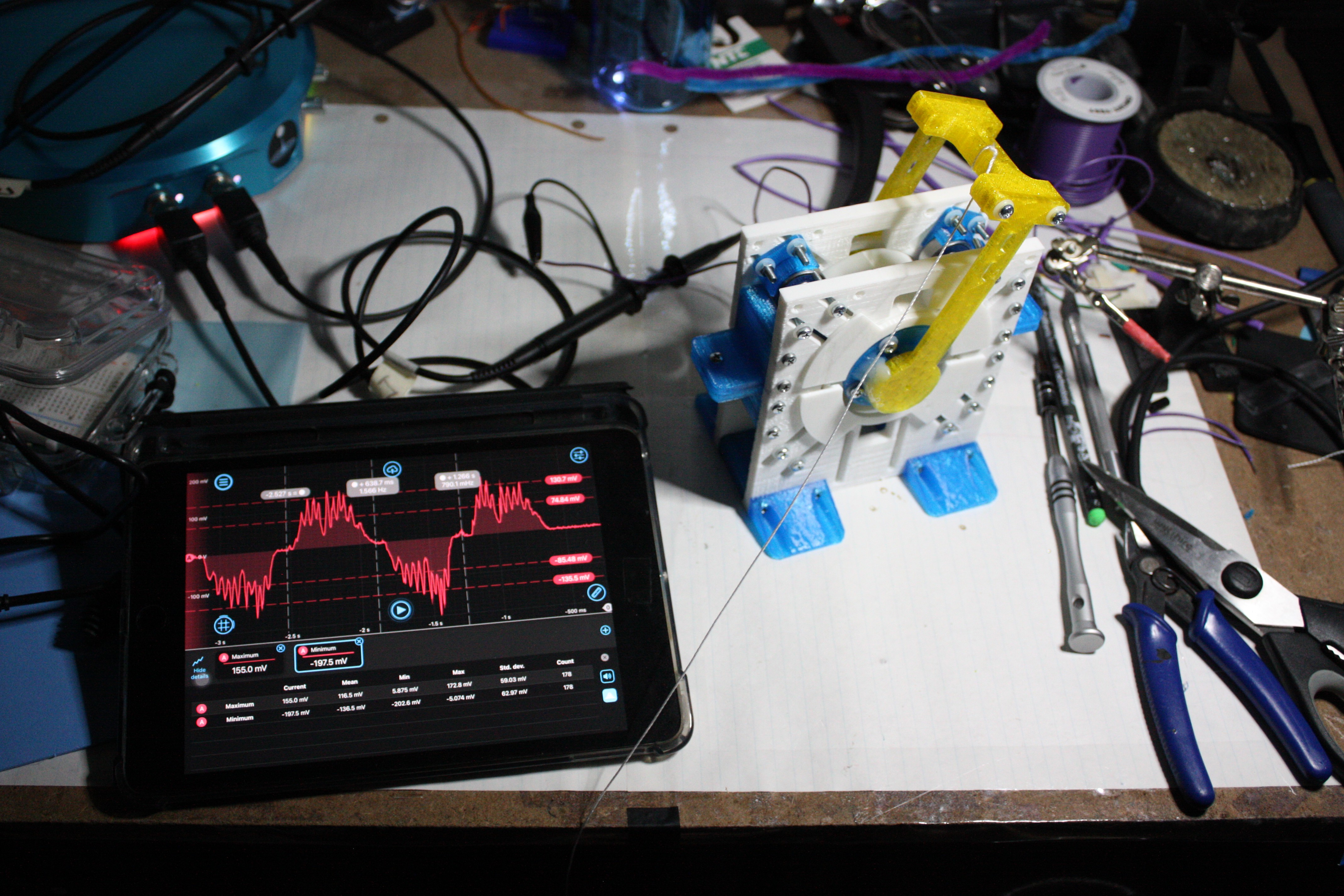
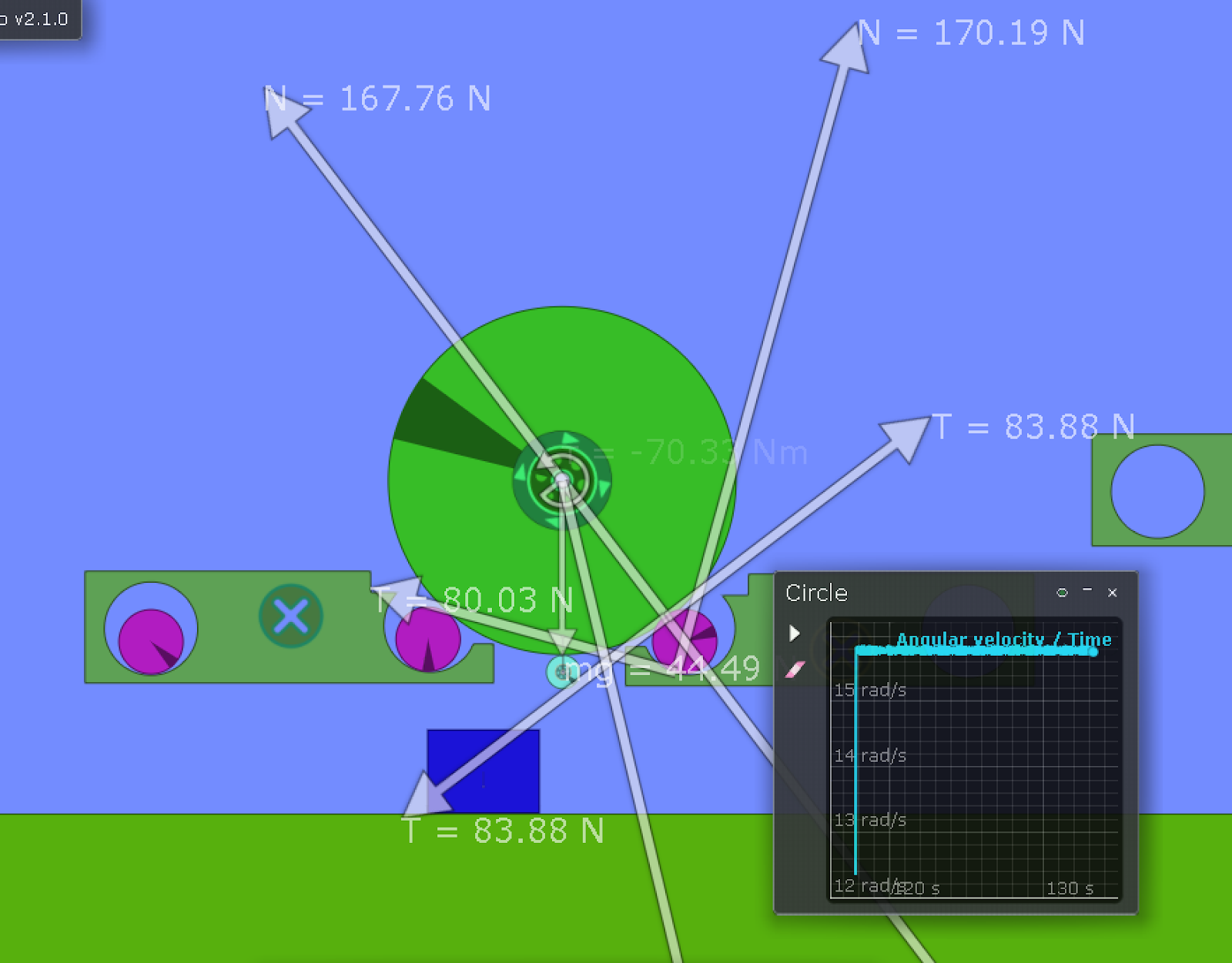
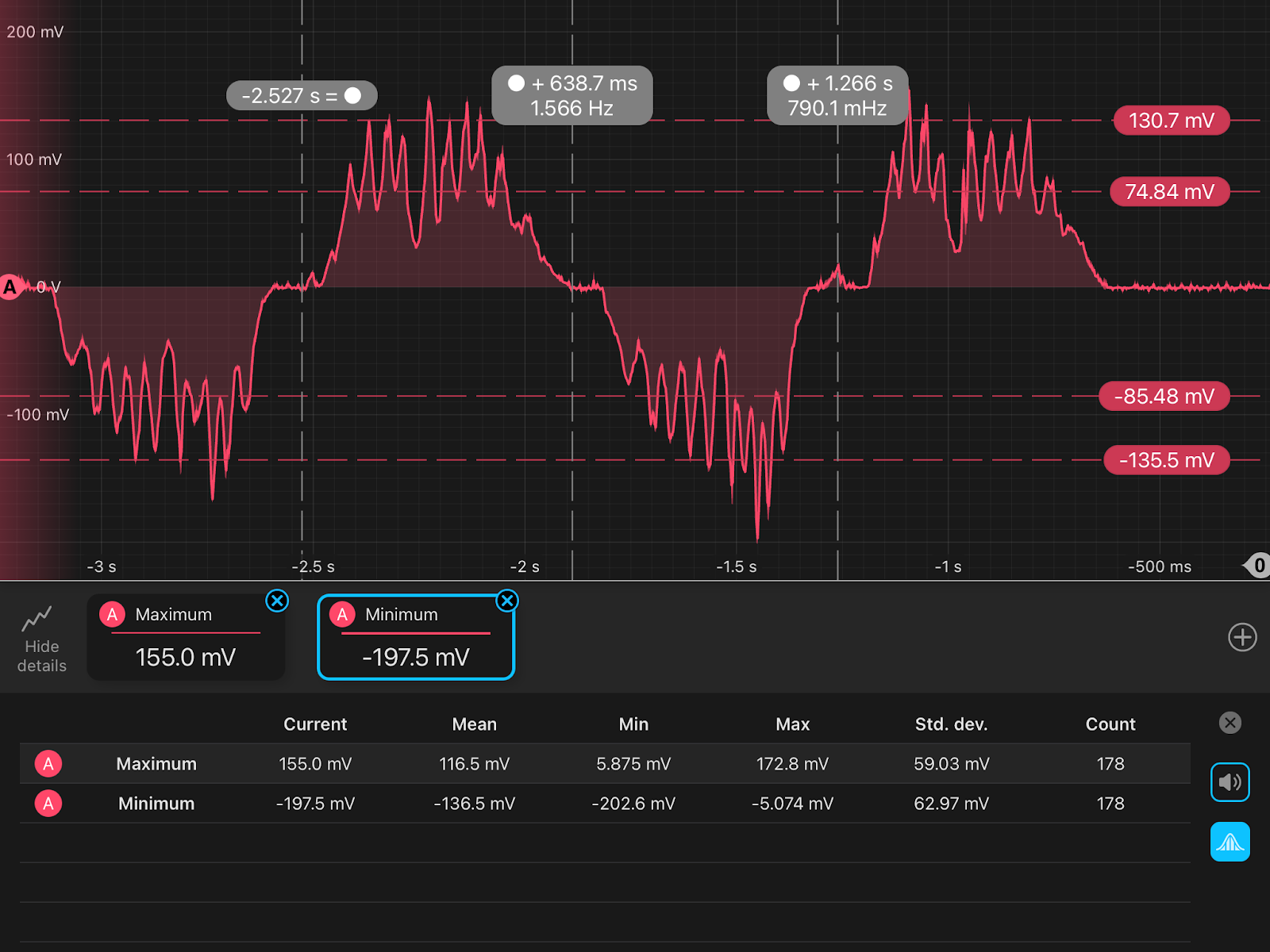
Based on the preliminary data, the generator gives 80 mV (at least). Further research is needed to verify the actual current given. A napkin estimation puts this around 1.3 * 10^-9 kWh. More work is needed to determine the parameters from the generator and the kite. This number can only get even better with improvements: the generator motor, optimizations on generation (make it larger), and verifying the current amount from the motor.
Documentation & Design Process
Please see our project logs for documentation:
Design
Electronics
Software
Firmware
Testing
Problem
Completion
Work on the project started exactly when the Hackaday Prize 2022 launched. This is a completely new project. This can be verified in the Github repository commit history.
In 30 days we have completed:
- Software control prototype
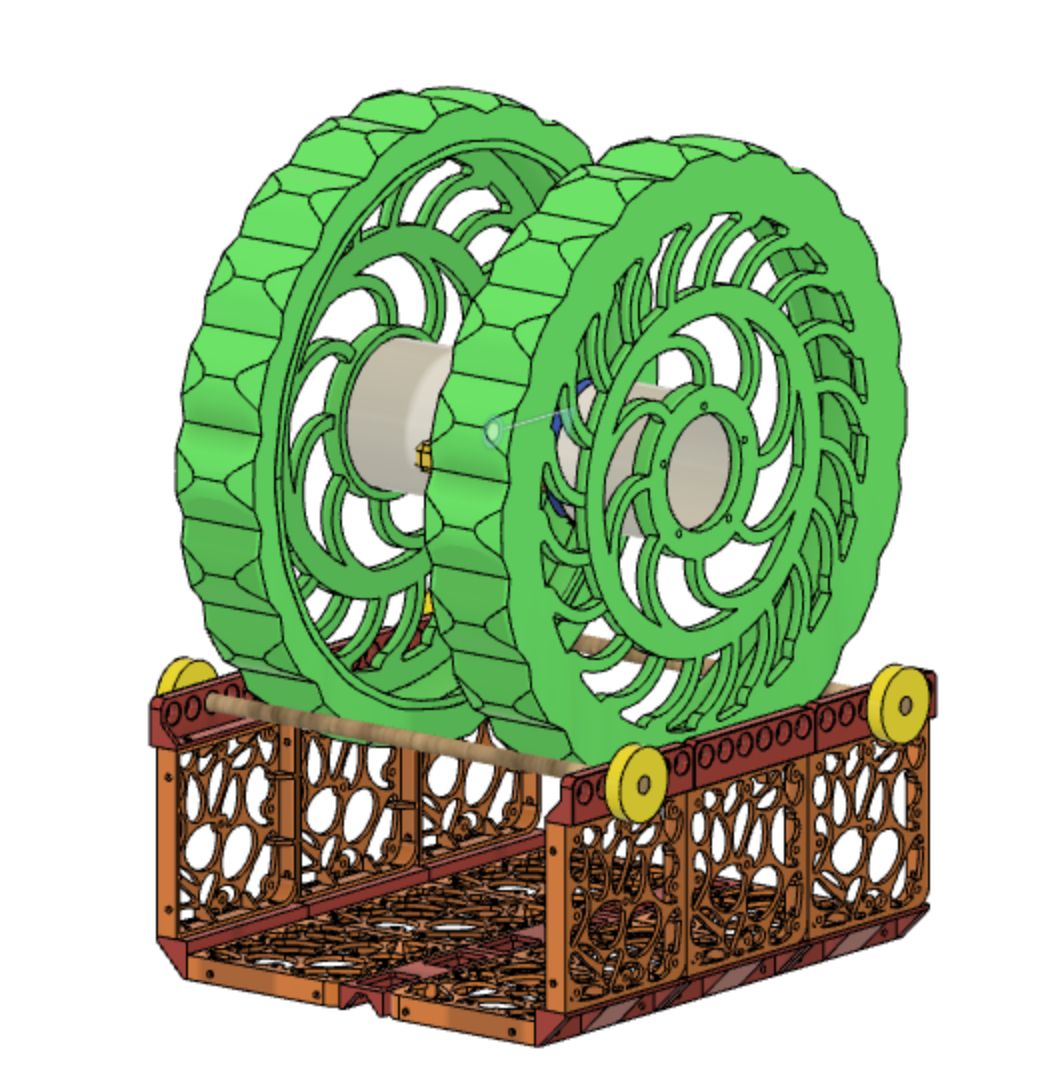
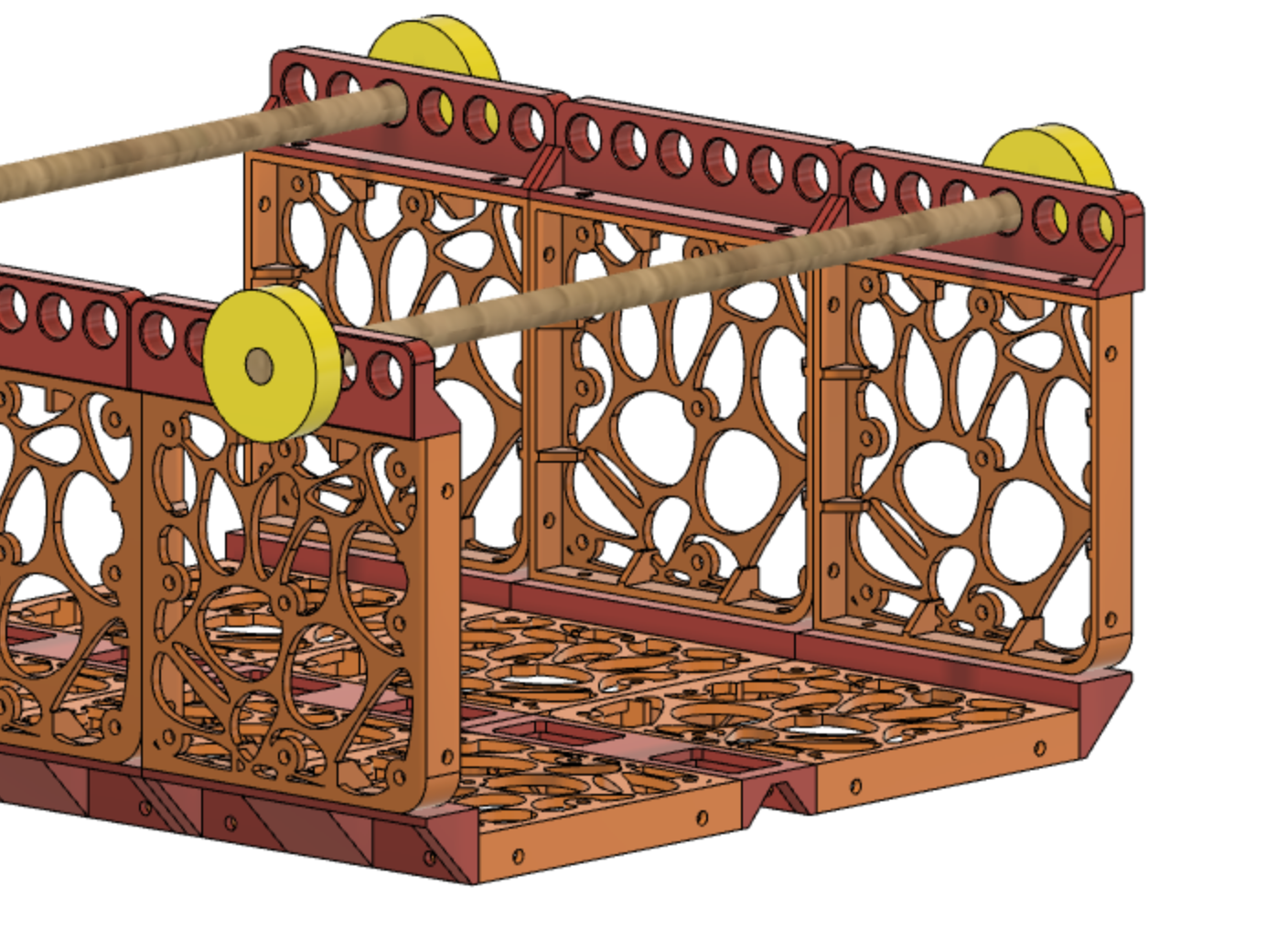
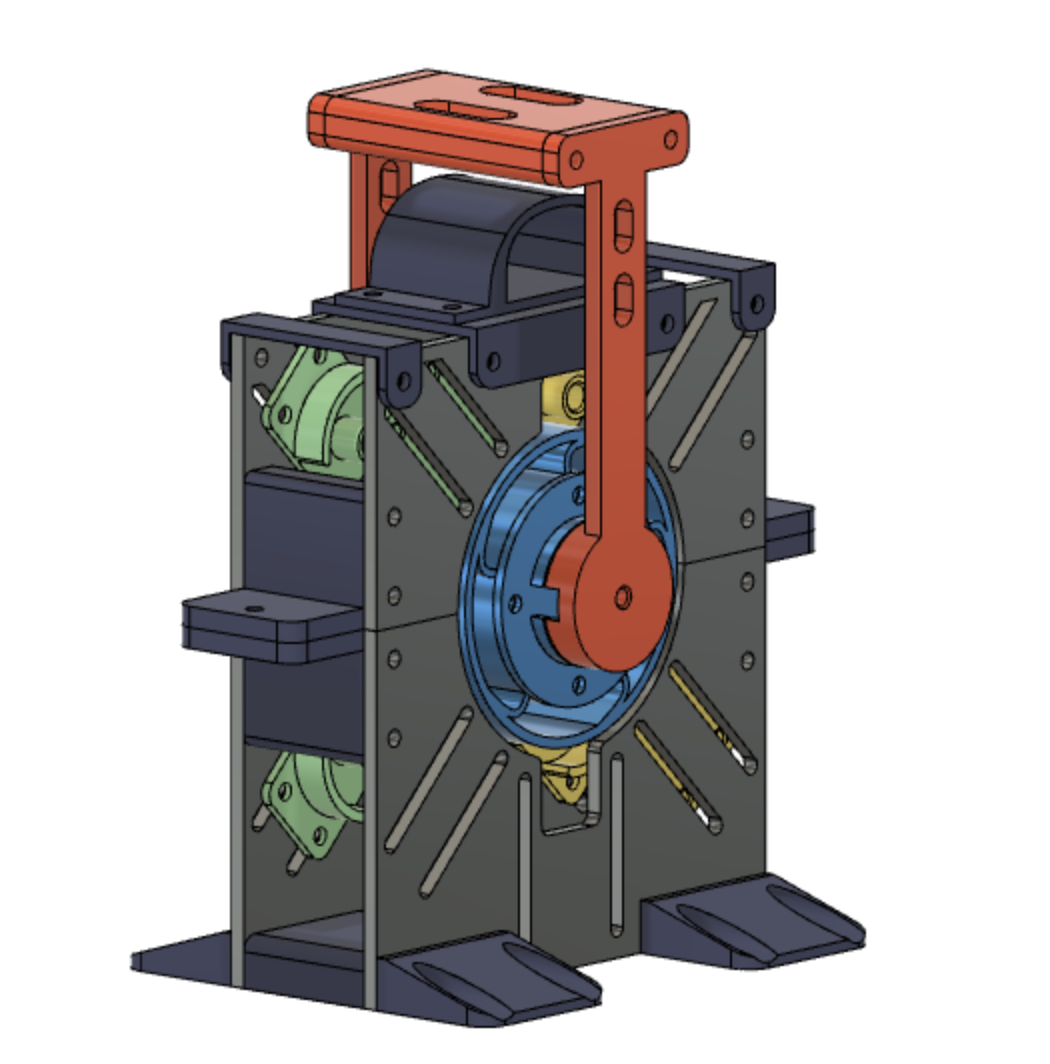
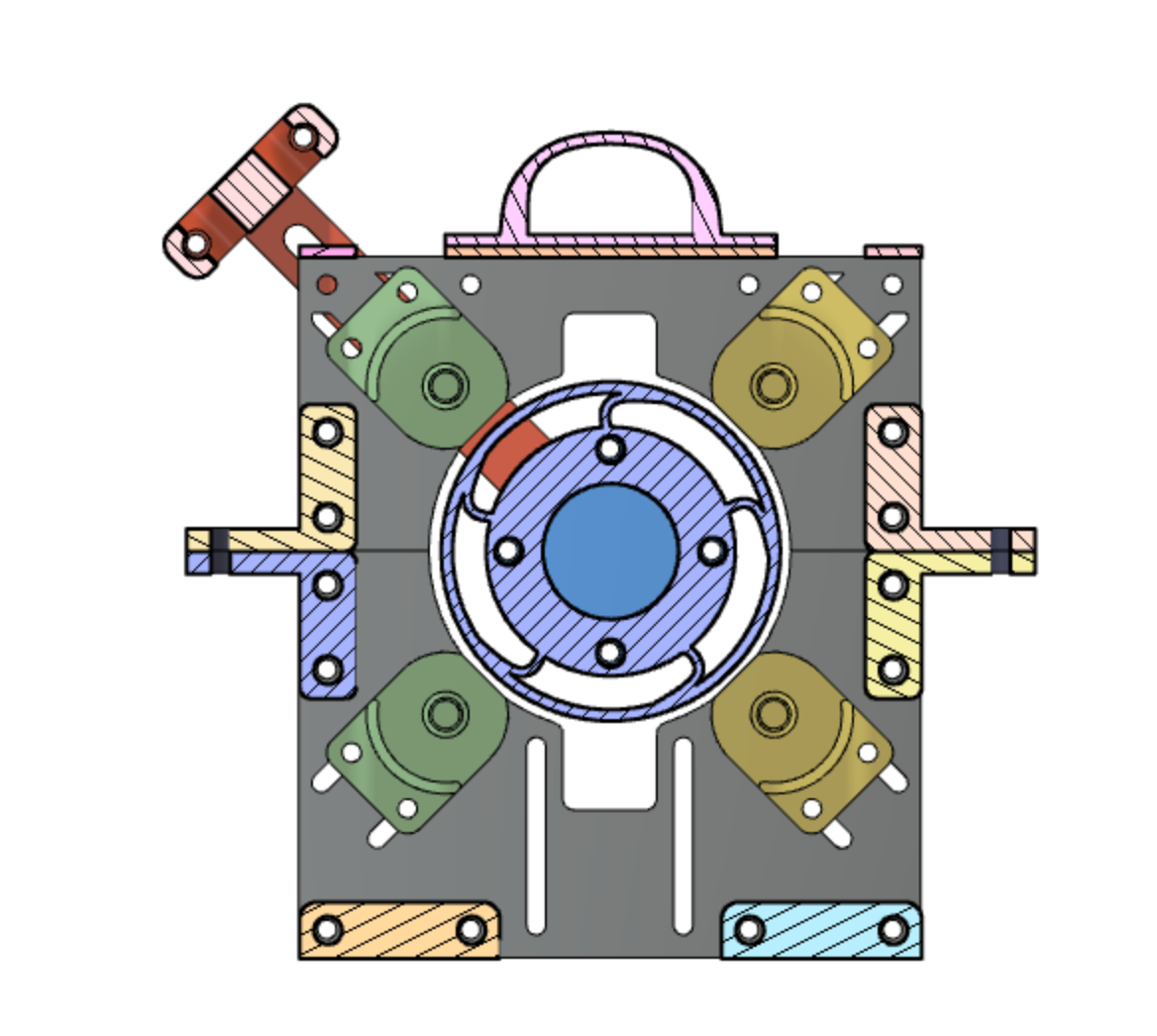
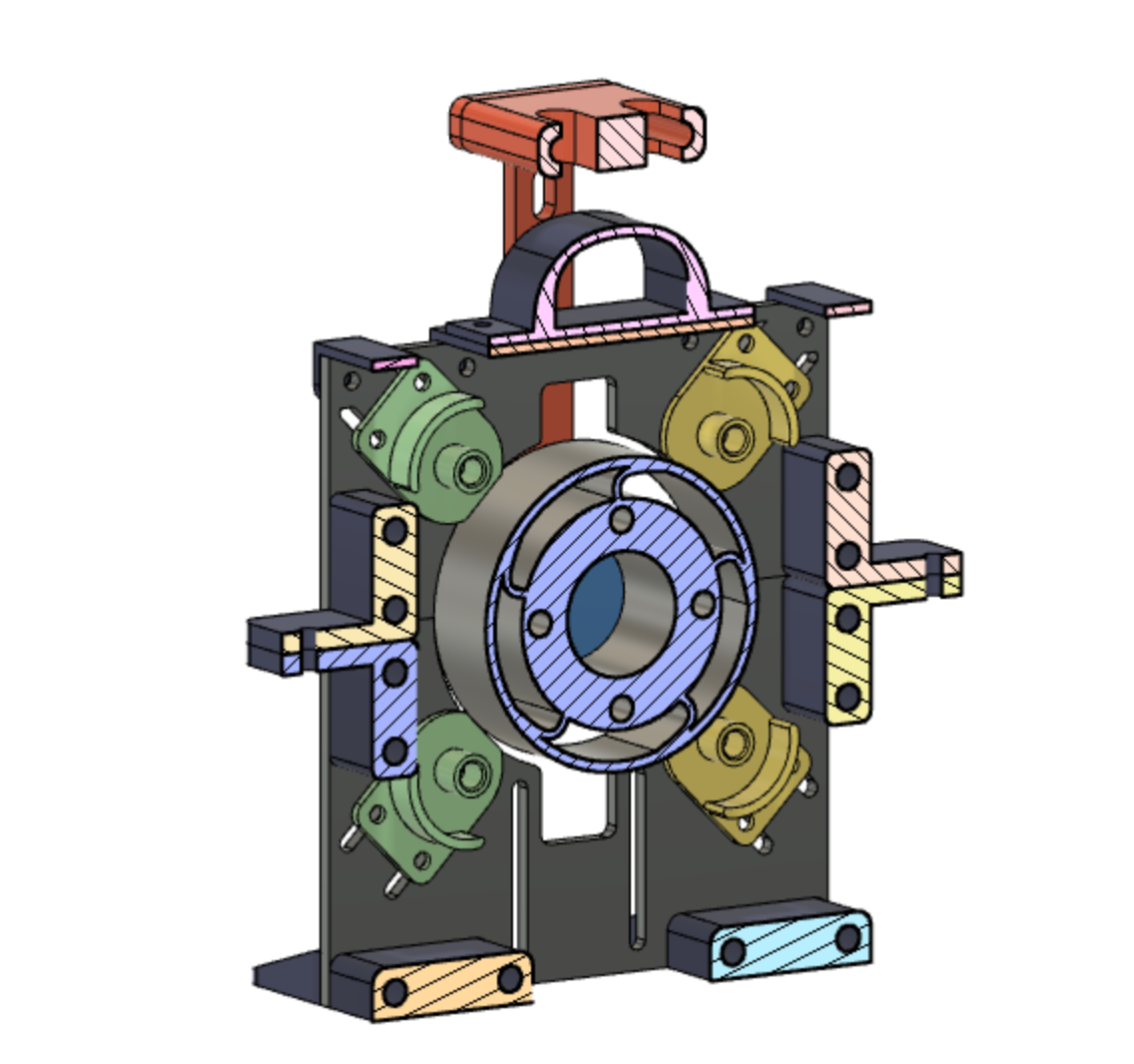
- Generator 3D printed prototype and CAD model
- System block diagram
- Two outdoors field tests
- Pitch & yaw CAD model
- Start of firmware with command line interface
- Bonus: repaired a 3D printer X-axis skipping issue!
There is still more work to do, especially on the electronics and firmware.
The goal is to build a prototype that will control and generate power from a kite being flown autonomously. Advancing to the final round would allow us to reach that goal by granting us seed funding for materials & fabrication which would not be possible on our tiny 3D printer.
Thanks, and keep your eyes to the skies!























 Peter Wasilewski
Peter Wasilewski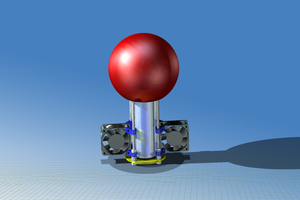
 Hardie
Hardie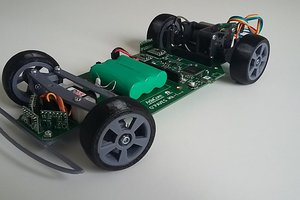
 AdaCore
AdaCore
 Owen Trueblood
Owen Trueblood
While this is a really cool project I have trouble to believe that this generator setup will produce a significant amount of power. May be a back of an envelope calculation can give a idea what to expect and whether a different design is really necessary.
The obvious issues are that the speed the kite can move from left to right is very limited and that only a small fraction of the pull force is used to move the lever.
The "traditional" way of doing this is using a winch that the kite is pulling and though rotating. This uses the full pull force but requires reeling the kite back in after the line is used up.
An easier to implement alternative might be using a spring that the kite is pulling against. By modulating the pull force aerodynamically this could create a back and forth motion similar to the current lever design but with larger range of motion and force. This could be done both with a lever or with a winch. The later will make it easier to convert a large force into fast speed/rpm while maintaining a large range of motion.