0%
0%
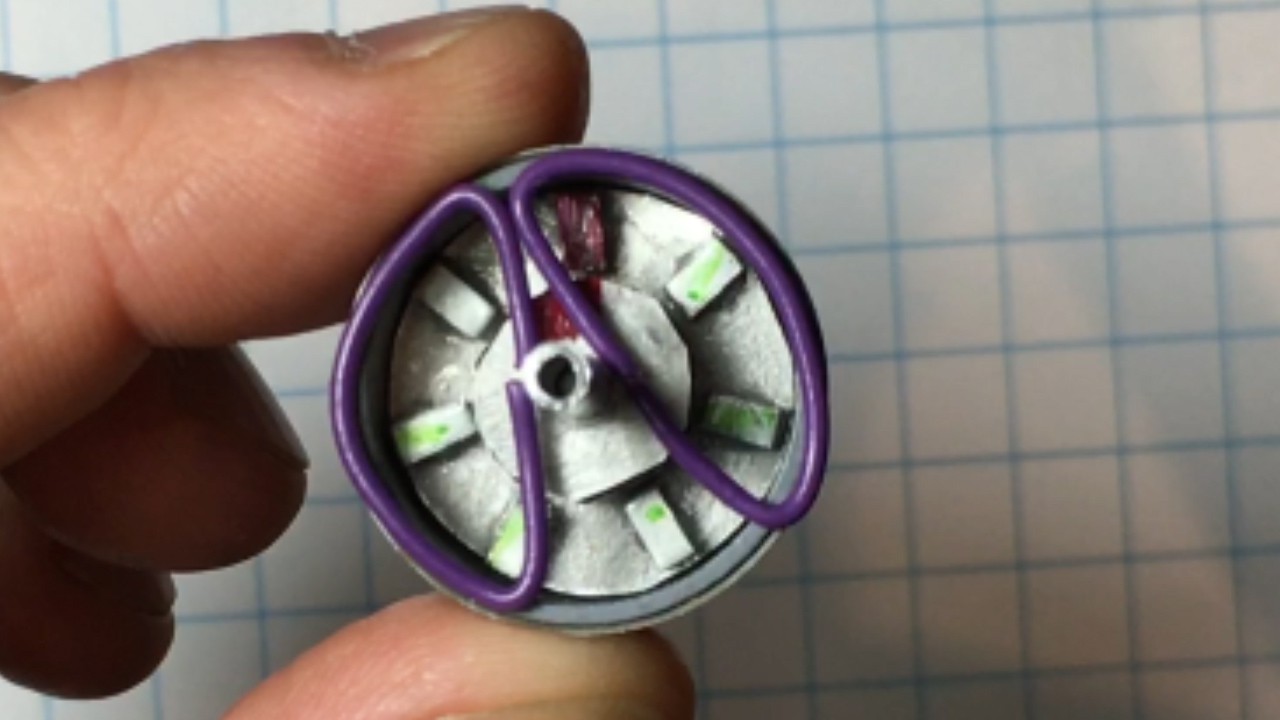
3D Printed Robot Actuator
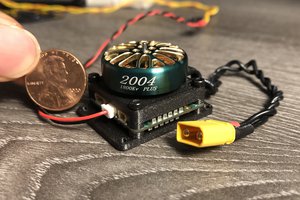
A high speed and high torque robotic actuator using low-cost brushless motors, custom controller, 3D printed parts and bearings.
 Paul Gould
Paul GouldBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Christopher Xu
Christopher Xu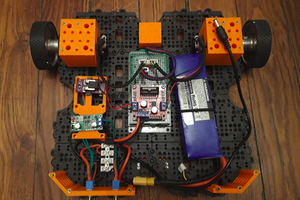
 matop
matop
 Petar Crnjak
Petar Crnjak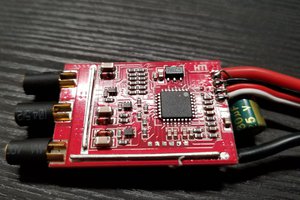
 Anthrobotics
Anthrobotics
@Dan DWRobotics I do have a little bit of backlash, but it is hardly noticeable. The teeth of ABS cycloidal gear acts like a mini spring, so the back increases a bit with increase load. As you said the software can compensate for this. Backlash was the main reason I started to look into my own actuator design. I made a little biped with RC servos and my own servo amplifiers. The servo backlash was terrible.