 Peter Buckley
Peter BuckleyLets go over some of my quick ideas, plans, and final goals for this build.
Goals.
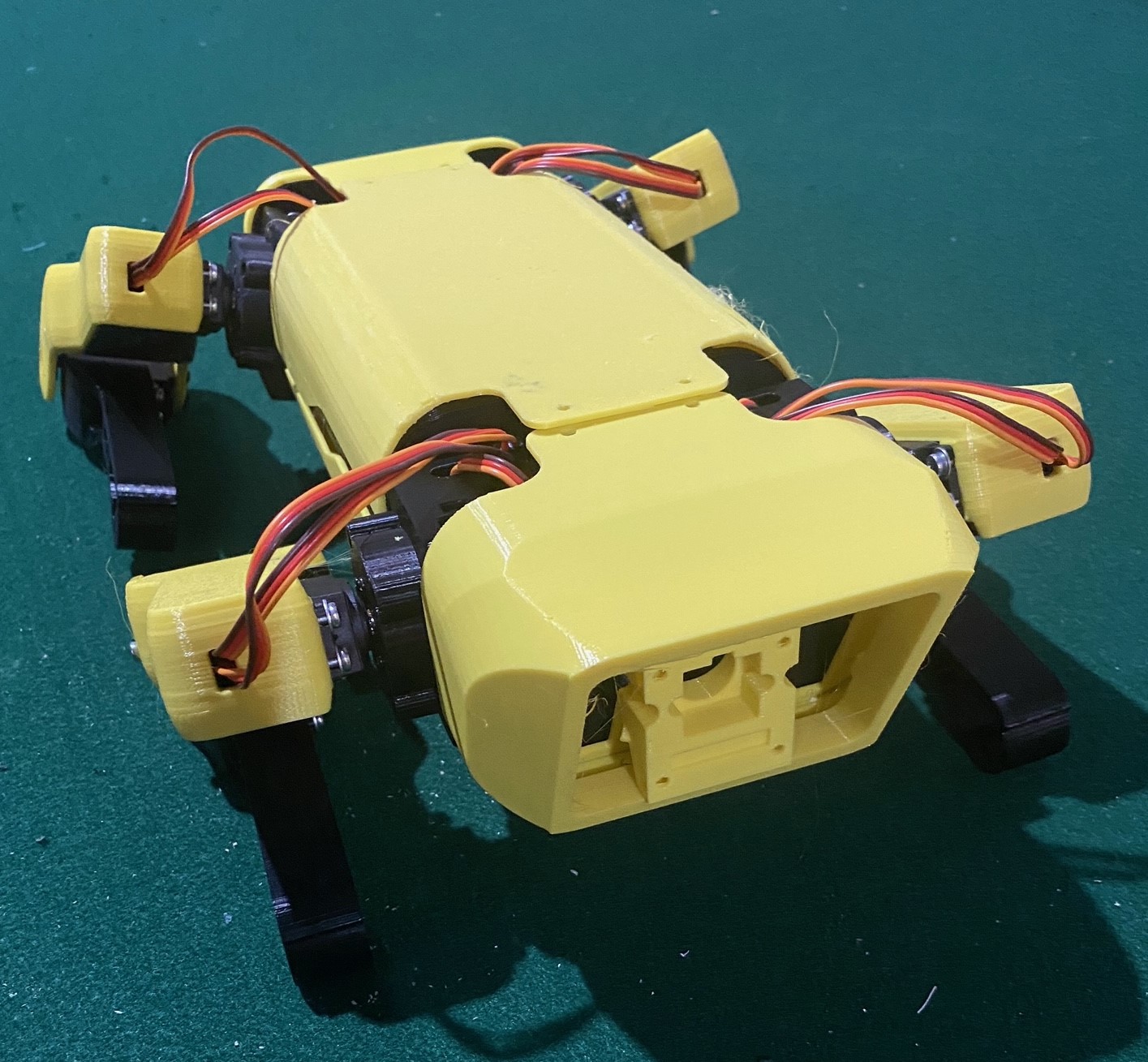
Goal Number 1 - Robot is able to walk with reasonable balance and agility on a multitude of terrain.
Goal Number 2 - Robot has the power and ability to jump ~6 inches.
Goal Number 3 - Ability to control the robot with a familiar controller (Xbox).
Goal Number 4 - Full kinematic model and 12 degrees of freedom.
Goal Number 5 - Amazon Alexa integration and robot has a "personality"
Goal Number 6 - Keep it under budget, and easy to replicate for everyone!

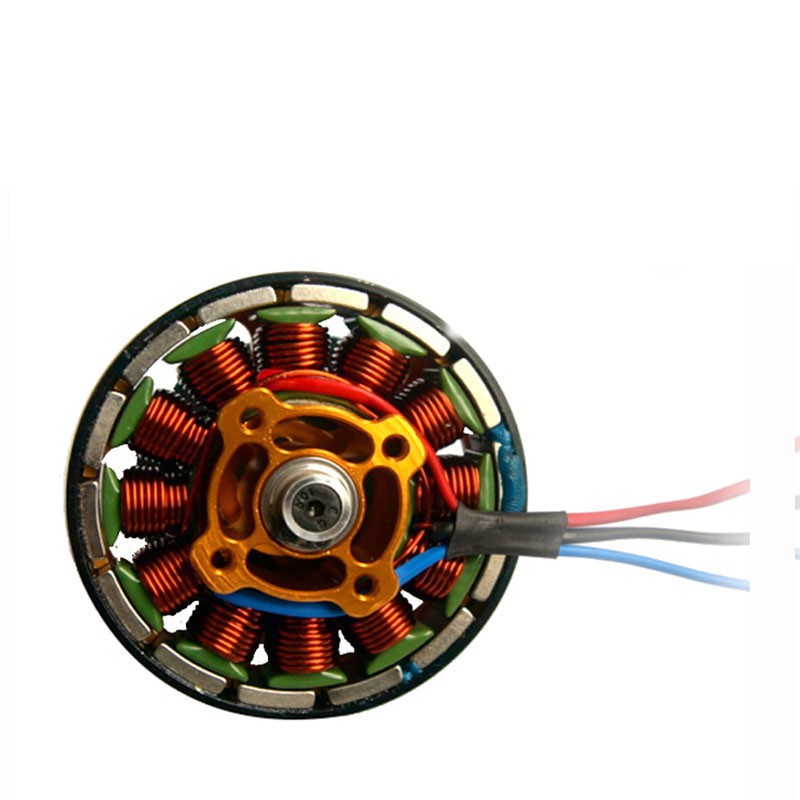 I picked 12 of these up for 16 bucks each plus $79 shipping to the us. Once the project is finished i will add a BOM with all the necessary links. As you can see from the motor picture, the bell has curved magnets just like the turnigy. Im not quite sure yet what i want to do in terms of gearboxes. I would like to do quasi direct drive using a planetary gear box for maximum compliance. Sadly I do not believe these motors will get the torque they need spinning that slow as they are a high kv for the application. Many chose to tackle this approach with a cycloidal gear box, which i will definitely test out, but i am worried about its backdrivability. I think the solution i will chose to go with is high gear ratio planetary gear box such as
I picked 12 of these up for 16 bucks each plus $79 shipping to the us. Once the project is finished i will add a BOM with all the necessary links. As you can see from the motor picture, the bell has curved magnets just like the turnigy. Im not quite sure yet what i want to do in terms of gearboxes. I would like to do quasi direct drive using a planetary gear box for maximum compliance. Sadly I do not believe these motors will get the torque they need spinning that slow as they are a high kv for the application. Many chose to tackle this approach with a cycloidal gear box, which i will definitely test out, but i am worried about its backdrivability. I think the solution i will chose to go with is high gear ratio planetary gear box such as  Before i begin assembly i have to wait for the servos. I ordered them from a us seller a few weeks ago but they have yet to arrive. I have held of ordering parts for the brushless robot as i am worried about budgetary concerns. More to come on that on the next update.
Before i begin assembly i have to wait for the servos. I ordered them from a us seller a few weeks ago but they have yet to arrive. I have held of ordering parts for the brushless robot as i am worried about budgetary concerns. More to come on that on the next update.

 Val
Val
 Rudolph
Rudolph
 Anthrobotics
Anthrobotics
 csabak
csabak
Peter,
Are you still working on this?
If so, I can probably assist in a variety of ways from providing all the code to getting parts, etc...
Thanks,
Trevor Chandler